







PIXHAWK2.4.8 フライト コントロール カーボンファイバー 450 フレーム キット - Ardupilot 100MW 無線テレメトリ クアッドコプター BLHELI 20A 2212 モーター ESC
PIXHAWK2.4.8 フライト コントロール カーボンファイバー 450 フレーム キット - Ardupilot 100MW 無線テレメトリ クアッドコプター BLHELI 20A 2212 モーター ESC
RCDrone
受取状況を読み込めませんでした
PIXHAWK2.4.8 フライト コントロール カーボンファイバー 450 フレーム キット仕様
使用: 乗り物とリモコンのおもちゃ
推奨年齢: 12+y,14+y,6-12y
原産地: 中国本土
材質: カーボンファイバー
ブランド名: rctosky
Pixhawk 2.4.8 は、最新の公式 ardupilot ファームウェアと PX4 ファームウェアをサポートしています。
1.高度な 32 ビット ARM CortexM4 高性能プロセッサ (2MB フラッシュ) は、NuttX RTOS リアルタイム オペレーティング システムを実行できます。
2. 14 PWM / サーボ出力;
3.バス インターフェイス (UART、I2C、SPI、CAN);
4.統合されたバックアップ電源とバックアップ コントローラに障害が発生しても、プライマリ コントローラはバックアップ コントロールにフェイルオーバーして安全です。
5.自動モードと手動モードを提供します。
6.冗長電源入力とフェイルオーバーを提供します。
7.マルチカラー LED ライト;
8.マルチトーンブザーインターフェイスを提供
9.フライト データを記録するマイクロ SD;
仕様:
インターフェース
1 .5 高電圧互換 UART 1、2、ハードウェア フロー制御付き
2. 2 CAN
3.Spektrum DSM / DSM2 / DSM-X 衛星受信機互換入力
4.Futaba SBUS 互換入力および出力
5.PPM 信号入力
6.RSSI (PWM または電圧) 入力
7.I2C
8.SPI
9.3.3 および 6.6VADC 入力
10.外部MICRO USBインターフェース
単純なコロケーション:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920KV モーター
簡易パッケージ:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920KV モーター
標準パッケージ:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920KV モーター
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4)
高パッケージ:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920KV モーター
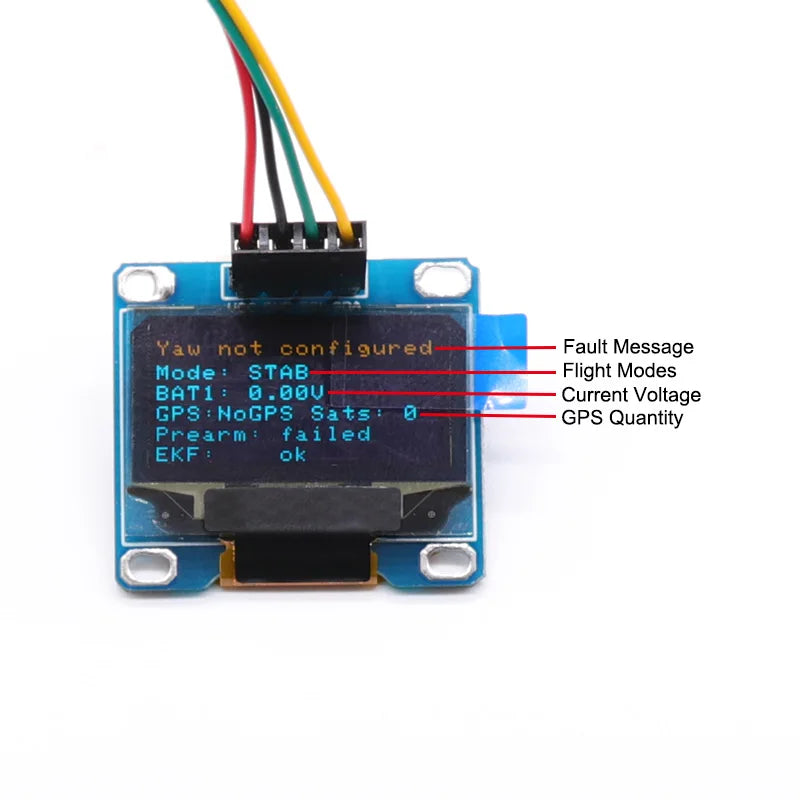
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + RGB LED + OLED スクリーン + 3 ライン (4Pin 1.25、6Pin) 1.25、3ピン 2.5.4)
433MHZ 100MW A :
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920 KV モーター
PIXHAWK 2.4。8+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4) + M8N GPS+ GPS ホルダー + 3DR パワーモジュール + ショックアブソーバー + 433MHZ 100MW 無線テレメトリ
433MHZ 500MW B:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920 KV モーター
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + RGB LED + OLED スクリーン + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4) ) + M8N GPS+ GPS ホルダー+ 3DR パワーモジュール+ショックアブソーバー+433MHZ 500MW 無線テレメトリ
433MHZ 1000MW C:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920 KV モーター
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダ + I2C 拡張ボード + RGB LED + OLED スクリーン + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4) ) + M8N GPS+ GPS ホルダー+ 3DR パワーモジュール+ショックアブソーバー+433MHZ 1000MW 無線テレメトリ
915MHZ 100MW A:F450+4 PCS BLHELI 30A +4 ペア 1045 プロペラ +4 PCS 2212
PIXHAWK 2.4.8+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4) + M8N GPS+ GPS ホルダー + 3DR パワーモジュール + ショックアブソーバー+915MHZ 100MW 無線テレメトリ
915MHZ 500MW B:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920 KV モーター
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + RGB LED + OLED スクリーン + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4) ) + M8N GPS+ GPS ホルダー+ 3DR パワーモジュール+ショックアブソーバー+915MHZ 500MW 無線テレメトリー
433MHZ 1000MW :
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920 KV モーター
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダ + I2C 拡張ボード + RGB LED + OLED スクリーン + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5.4) ) + M8N GPS+ GPS ホルダー+ 3DR パワーモジュール+ショックアブソーバー+433MHZ V5 1000MW 無線テレメトリー
433MHZV5 1000MW OSD:
F450+4 個 BLHELI 30A +4 ペア 1045 プロペラ +4 個 2212 920 KV モーター
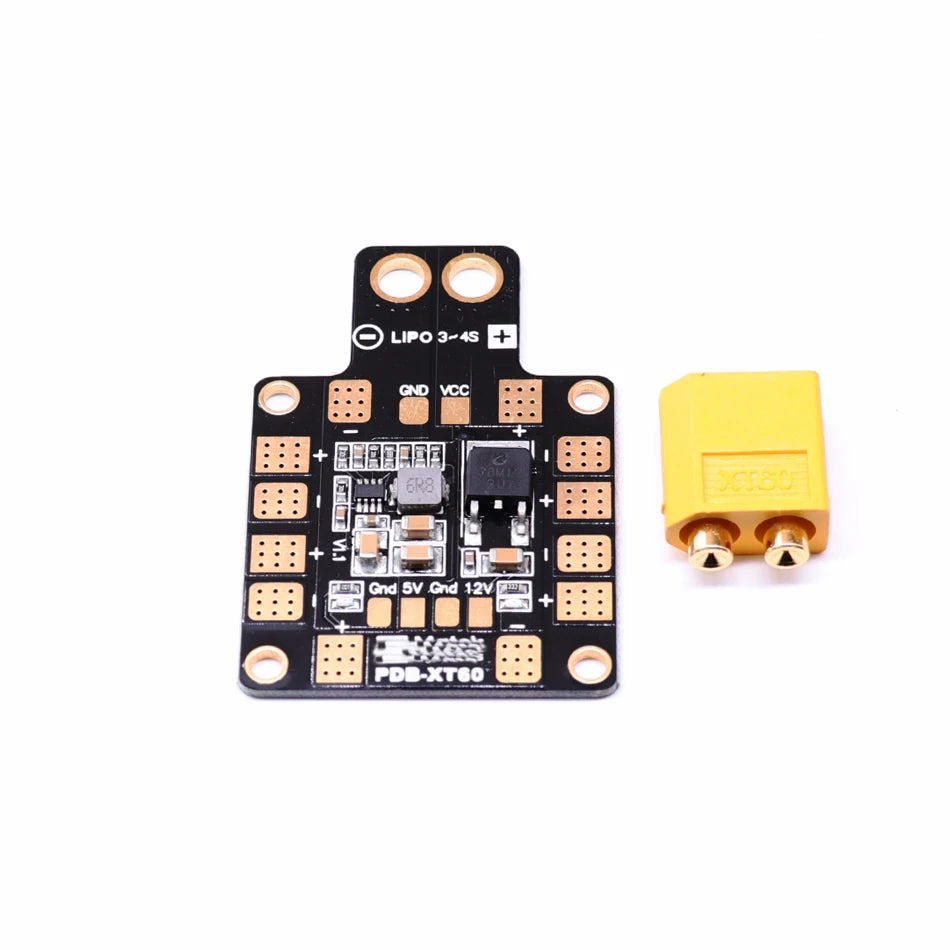
PIXHAWK 2.4.8(白または黒のシェル)+ 4G TF カード + 安全ボタン + ブザー + PPM エンコーダー + I2C 拡張ボード + RGB LED + OLED スクリーン + 3 ライン (4 ピン 1.25、6 ピン 1.25、3 ピン 2.5。4) + M8N GPS+ GPS ホルダー+ 3DR パワーモジュール+ショックアブソーバー+433MHZ V5 1000MW 無線テレメトリー+MINI OSD +PDB
トップパッケージ:



A.機能
A1: 高品質を確保し、ESC の電流耐久性を高めるために、純正の電子コンポーネントを使用してください。
A2: BLHeli ファームウェアに基づいており、優れた直線性とより迅速なスロットル応答を備えた高性能向けに最適化されています。
A3: マルチローター用に特別に設計されており、固定翼航空機およびヘリコプターと互換性があります。
A4: 低電圧カットオフ保護 / 過熱保護 / スロットル信号損失保護などの複数の保護機能。
A5: スロットル範囲は設定可能で、すべての受信機と完全に互換性があり、スムーズでリニアで正確なスロットル応答を提供します。 A6: デフォルト設定を含むすべてのパラメータは、送信機を使用してプログラムできます。
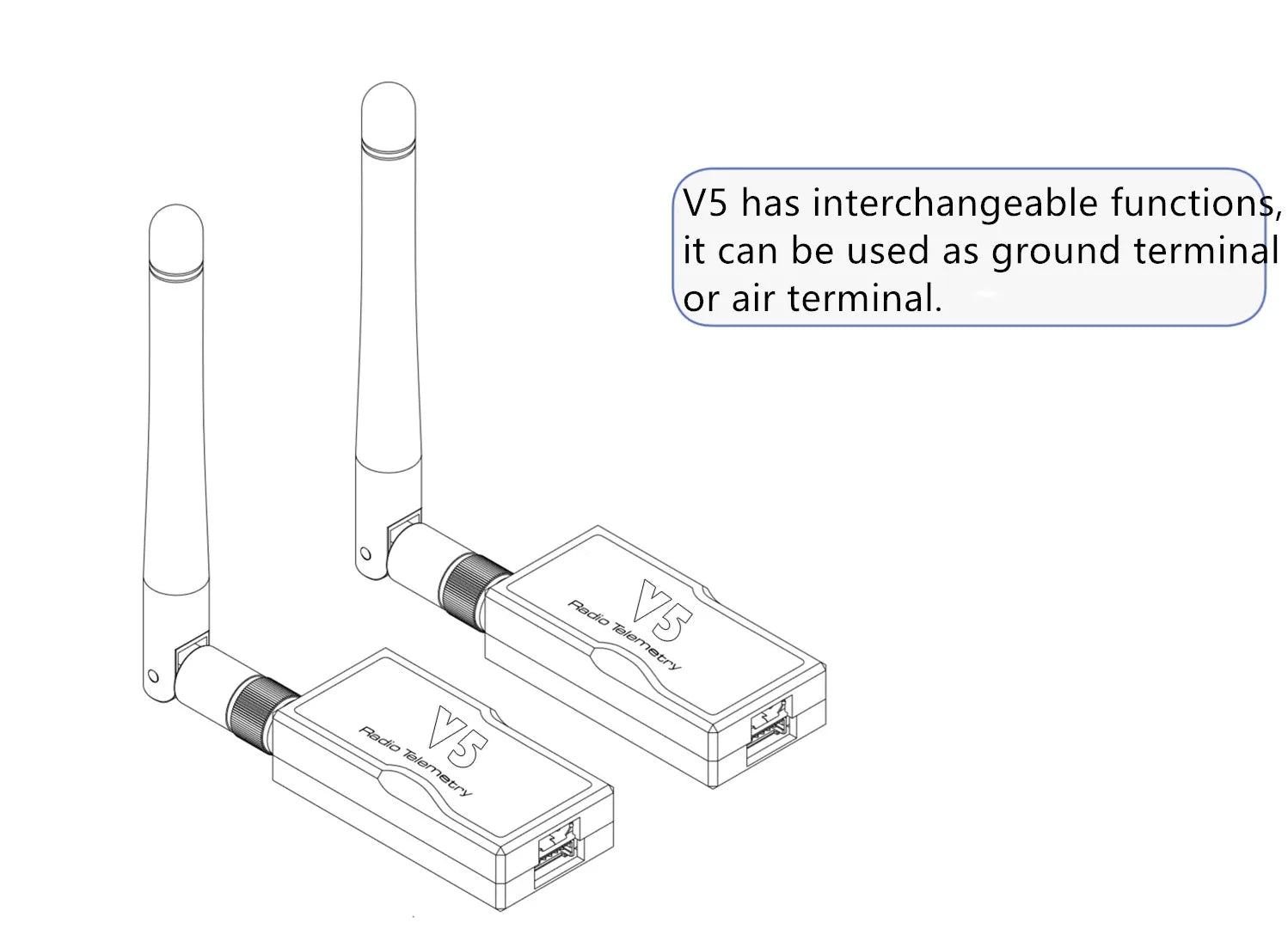
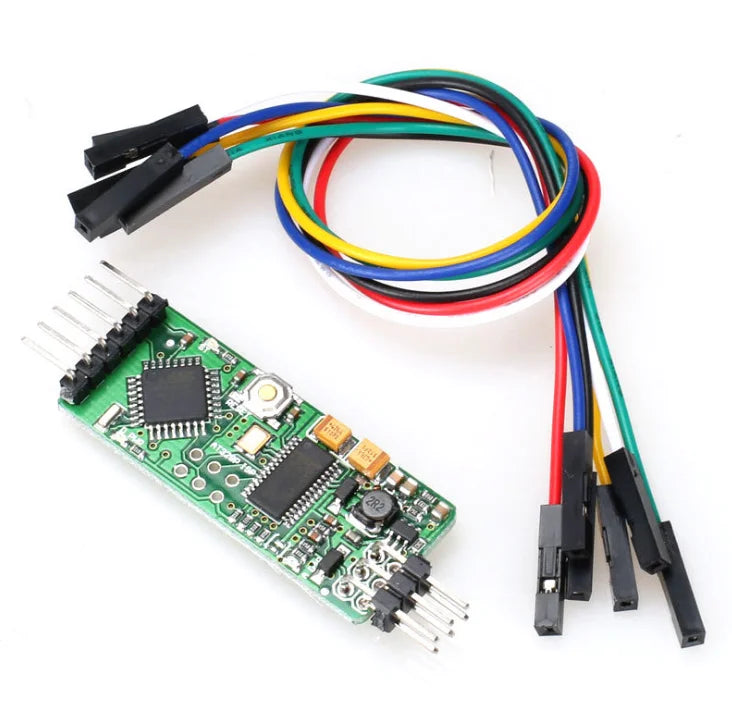
B. 製品仕様
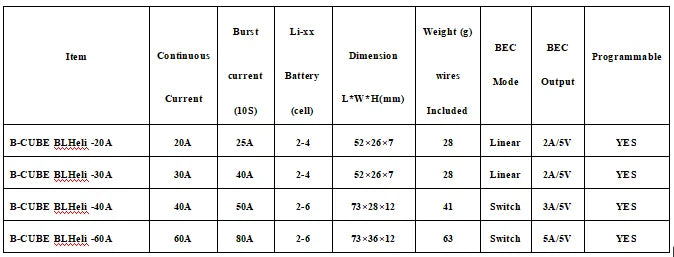
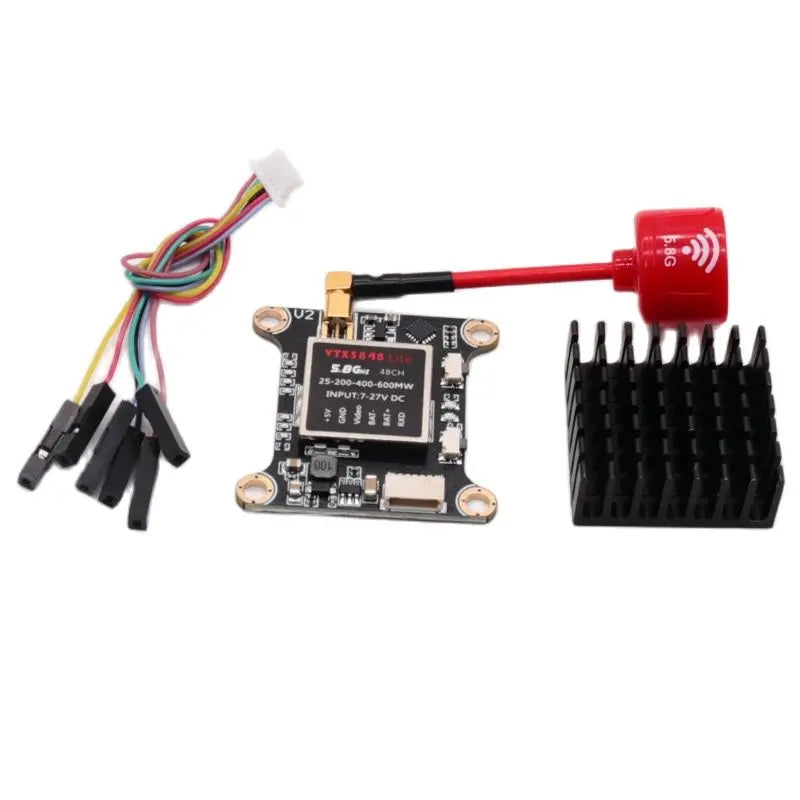
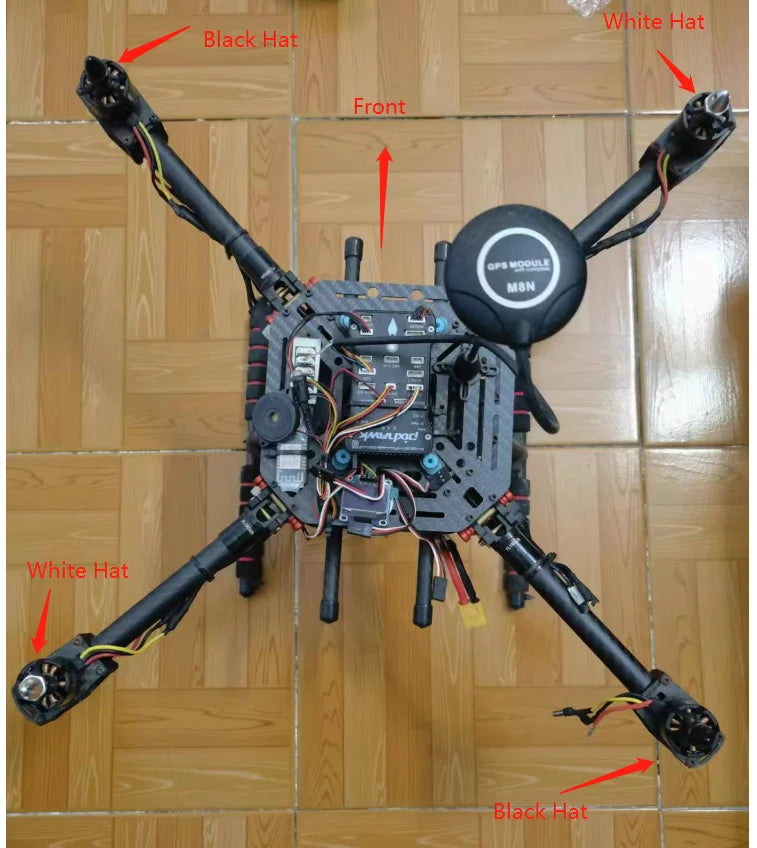
BEC BEC Treni Cobnbuou: DileD D プログラマブル電流 Batfert Vir e : モード出力電流 LtutHoinil (105) Iocluded B-CCBE BLHeli -20A 026 27 LineAr 1045 プロペラ V5 モジュールは交換可能な機能を備えており、地上局または空中端末として機能できます。 VTX5848 はビデオトランスミッタで、25MW-600MW、48 チャンネルをサポート (ヒートシンクと 3DBアンテナ付き) FPV カメラ この記事では、ESC、モーター、プロペラを自動操縦に接続する方法について説明します。Pixhawk は例として使用されていますが、他のオートパイロットも同様の方法で接続されます。 各 ESC の電源 (+)、アース (-)、および信号 (複数の) ワイヤを、モーター番号ごとにオートパイロットのメイン出力ピンに接続します。以下でフレーム タイプを見つけて、割り当てられたモーターの順序を決定します。 Pixhawk 出力ピン (番号付き)。最初の 4 つのピンは、Quadframe 以下の図は、各フレーム タイプのモーターの順序を示しています。数字は、オートパイロットからのどの出力ピンを各モーター/プロペラに接続する必要があるかを示します。プロペラの方向は緑色 (時計回り、CW) または青色 (反時計回り、CCW) で表示されます モーター順序図の凡例 上の図は、時計回り (プッシャーと呼ばれる) と反時計回り (プーラーと呼ばれる) の 2 種類のプロペラを示しています。以下に示すように、プロペラの形状によって正しいプロペラの種類を認識するのが最も確実です。厚いエッジは回転方向に移動するリーディング エッジです。後縁はより過激な波形で、通常はより薄くなります。 モーターの取り付け方法?


![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_286b8762-ba49-44db-a8cd-b38c172bd03c.webp?v=1714895788)




モーターの順序図

クアッドコプター

時計回りと反時計回りのプロペラを認識する
Related Collections























