




ROBOTERA XHAND 1 ロボットハンド - 12自由度、270°触覚指先、80Nグリップ、25kg持上げ、EtherCAT/RS485、ROS対応
ROBOTERA XHAND 1 ロボットハンド - 12自由度、270°触覚指先、80Nグリップ、25kg持上げ、EtherCAT/RS485、ROS対応
ROBOTERA
受取状況を読み込めませんでした
概要
ROBOTERA XHAND 1は、フルダイレクトドライブ関節モジュールと12のアクティブな自由度を持つ5本指のロボットハンドです。このハンドは人間の手のサイズ(191 mm x 94 mm x 47 mm)で、精密な操作を目的としており、高解像度の触覚センサー、強力なグリップ力、ロボティクス研究と統合のための開発者に優しいインターフェースを備えています。
主な特徴
- 統合されたギア駆動、力制御関節モジュール(親指に3つ、他の4本の指に9つ)を備えたフルダイレクトドライブアーキテクチャ。
- 12の完全にアクティブな自由度;複雑な手内操作のための人差し指の横揺れは±15°。
- 高いグリップ性能:指先の力15N;最大グリップ力80N;最大把持重量は25 Kg(手のひら上)および16 Kg(手のひら左)。
- 高速度のアクチュエーションをサポートし、&2Hzを超える開閉繰り返しを実現;最大10 CPS(クリック毎秒)の指クリックを実証。
- 270°の指先触覚カバレッジを持つ5つの三次元触覚アレイセンサー; 指先ごとの全手解像度は12x10 x 5です。
- 接線力(XおよびY)を含む三次元力センサー; 指先の再位置決定精度は+/-0.20 mmです。
- ダンピング付きのバックドライブ可能<= 0.1 Nm; 現在ループ力制御および力-位置制御による適応的相互作用。
- 開発者に優しい接続性: EtherCATおよびRS485(USB); ROS1/ROS2、Ubuntu(Linux)、x86およびARMアーキテクチャ、TwinCAT、および一般的なロボットアーム(xARM、Realman、URを含む)と互換性があります。
- 耐久性は1,000,000回の無負荷把持サイクルに評価されています; 動作温度は-20°C ~ 60°Cです。
お問い合わせ、統合サポート、または大量購入については、[email protected] orに連絡するか、https://rcdrone.top/を訪問してください。
仕様
| パラメータ | 値 |
|---|---|
| 重量 | 1100 g |
| 寸法 (L x W x T) | 191 mm x 94 mm x 47 mm (大人の手のサイズ) |
| アクティブ自由度 (合計) | 12 |
| パッシブ自由度 (合計) | 0 |
| 自由度の割り当て | 親指 x 3; 人差し指 x 3; 中指 x 2; 薬指 x 2; 小指 x 2 |
| 親指のアクチュエーション/伝達 | 3つのギア駆動の力制御関節モジュール |
| 四指のアクチュエーション/伝達 | 9つのギア駆動の力制御関節モジュール |
| 指先の構成 | 丸型または丸みを帯びた指先 |
| 横方向のスイング | -15°~+15° (人差し指) |
| フィンガーチップリピート位置精度 | +/− 0。20 mm |
| 制御モード | 位置制御(低減衰/高減衰)、電流ループ力制御、力-位置制御 |
| 指先の力 | 15N |
| 最大握力(全手) | 80N |
| 最大把持重量(手のひら左) | 16 Kg |
| 最大把持重量(手のひら上) | 25 Kg |
| 親指の最遠対立 | 小指 |
| 開閉繰り返し速度 | >2Hz |
| バックドライブ減衰(バックドライブ可能) | <= 0.1 Nm |
| 触覚カバレッジ | 270°五指の指先の囲い |
| 触覚センサーの数 | 五つの指先にある270°三次元囲い触覚アレイセンサー |
| 触覚解像度(全手) | 12x10(指先ごとの270°囲い)x 5 |
| 触覚センシング寸法 | 三次元力センサー(接線方向の力XおよびYを含む) |
| 全手制御周波数 | 83Hz |
| 通信速度 | EtherCAT: 100MHz; RS485: 3MHz |
| センシングパラメータ | 指先: 120の三次元プロファイリングアレイ力; 関節: 位置、速度、温度、電流(トルク) |
| 制御パラメータ | 関節位置; 関節トルク; 関節剛性係数; 関節ダンピング係数 |
| 無負荷グラスプサイクル | 1,000,000サイクル |
| 動作温度範囲 | -20°C ~ 60°C |
| 動作電圧 | 24V ~ 72V |
| 静的電流 | 0.15A @48V, 7W |
| 最大電流 | 2.5A @48V, 120W |
| 通信インターフェース | RS485 (USB), EtherCAT |
アプリケーション
- 遠隔操作: MRおよびグローブ遠隔操作をサポート; Vision Pro遠隔操作; Manus Gloves; Pico/Meta Quest。
- ロボットアームおよびヒューマノイド統合: xARM、Realman、URおよびその他のロボットアームと互換性があります。
- 研究およびシミュレーション: 精密URDF、触覚センサーシミュレーション; Isaac GymおよびMujocoを使用した強化学習に適しています。
- 人間と機械の相互作用およびコンプライアントフォース制御による人間のツールの操作。
マニュアル
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
詳細

ROBOTERA XHAND1は、完全なダイレクトドライブを備えたロボットハンドで、真の自由と高度な器用さを提供します。

ROBOTERAのXHAND1:12自由度を持つヒューマノイドの五本指の手、各指先に270°の触覚センサー、80Nのグリップ力、25kgの耐荷重。複雑な作業や工具の取り扱いのために設計されています。

XHAND 1:各関節にダイレクトドライブモジュールを備えた初の器用な手。高出力のコードレスモーター、低減衰の減速機、精密エンコーダー、先進的なロボット操作のための独自開発の統合関節モジュールを特徴としています。
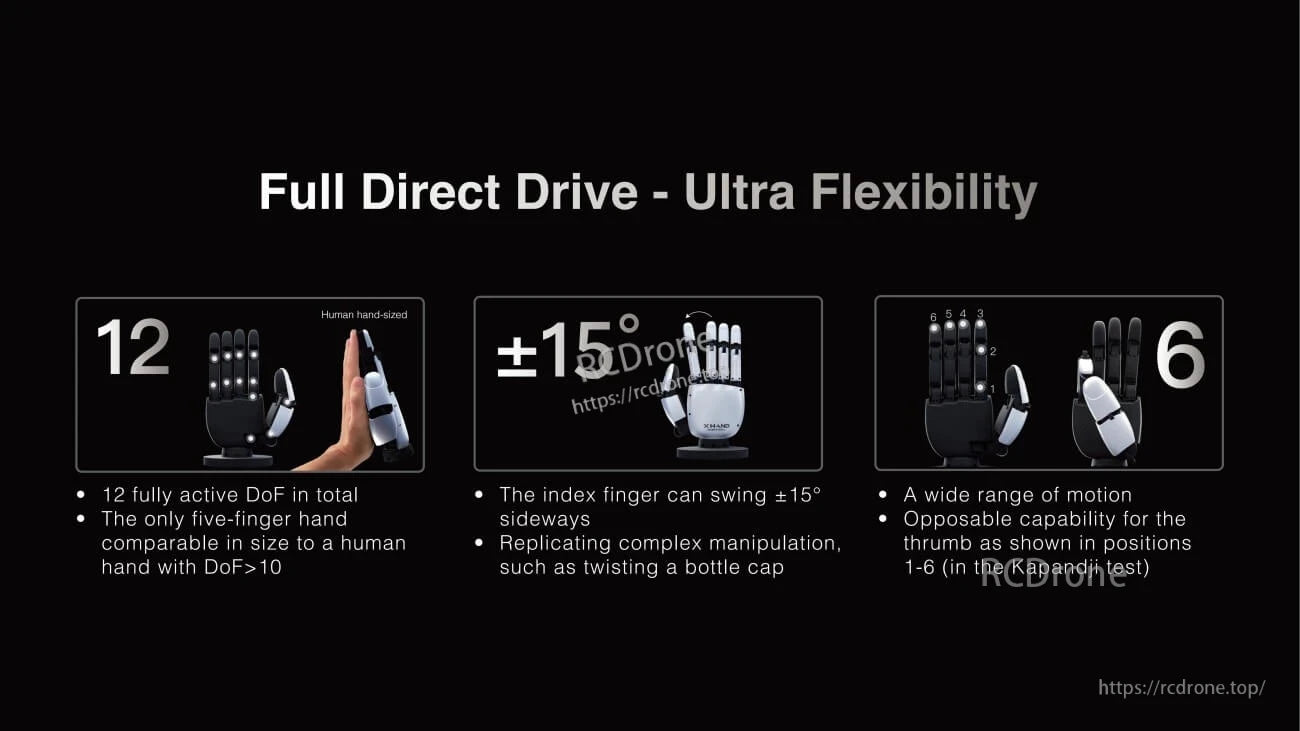
ROBOTERA XHAND 1は、12のアクティブな自由度を持つ超柔軟な人間サイズのロボットハンドです。人差し指は複雑な作業のために±15°横に動き、親指は多様な操作のために6つの対向位置を提供します。

ROBOTERA XHAND 1:25kgの荷重、80Nのグリップ力、フルダイレクトドライブ、同様のリンク/腱駆動ソリューションを超えています。

フルダイレクトドライブロボットハンドは、ギア駆動の速度で10 CPSを達成し、トルクは1 Nmを超え、リンクおよび腱システムを上回る優れたゲームパフォーマンスを実現します。

ROBOTERA XHAND 1は、270°の指先センサーを備え、>100ポイントと0.05 Nの精度で3D力、触覚、温度センサーを提供し、優れたグリップ性能を確保します。
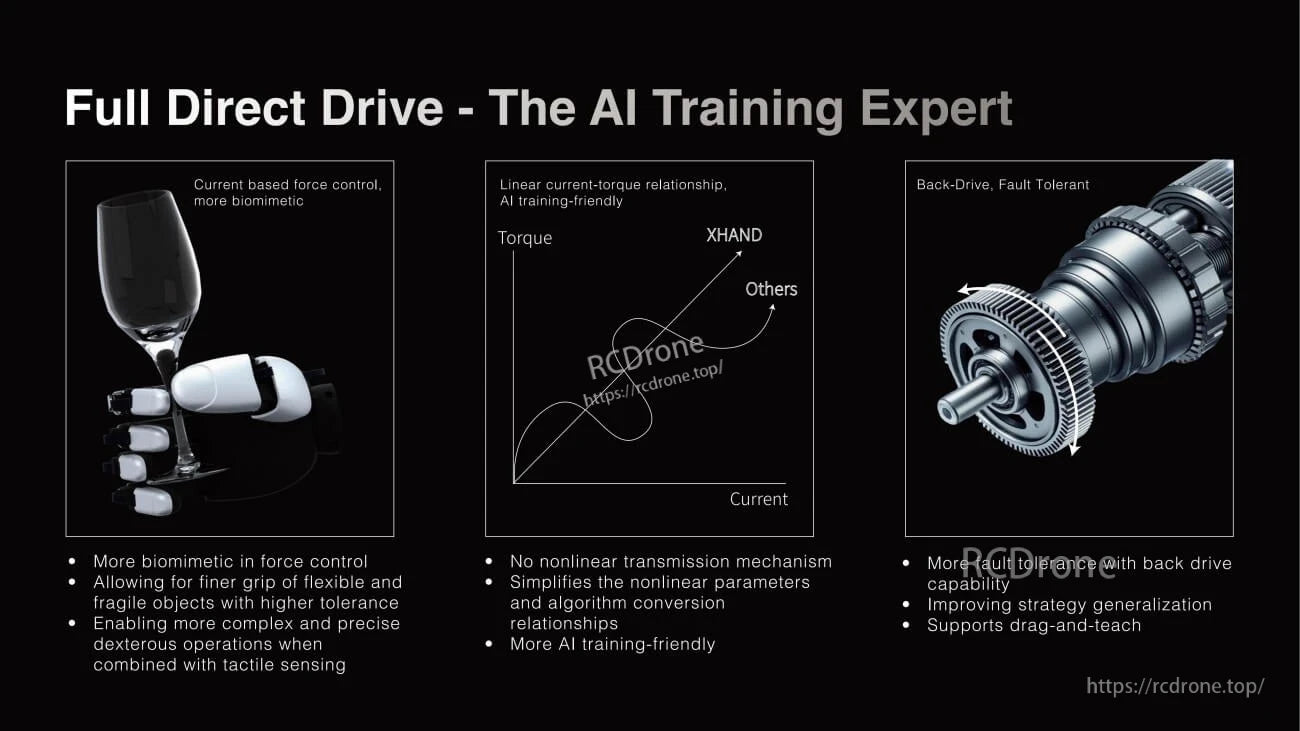
ROBOTERA XHAND 1は、生物模倣力制御、AIトレーニングのための線形トルク-電流応答、バックドライブ故障耐性を提供し、精密なハンドリング、簡素化されたアルゴリズム、ドラッグアンドティーチサポート、戦略の一般化を改善します。
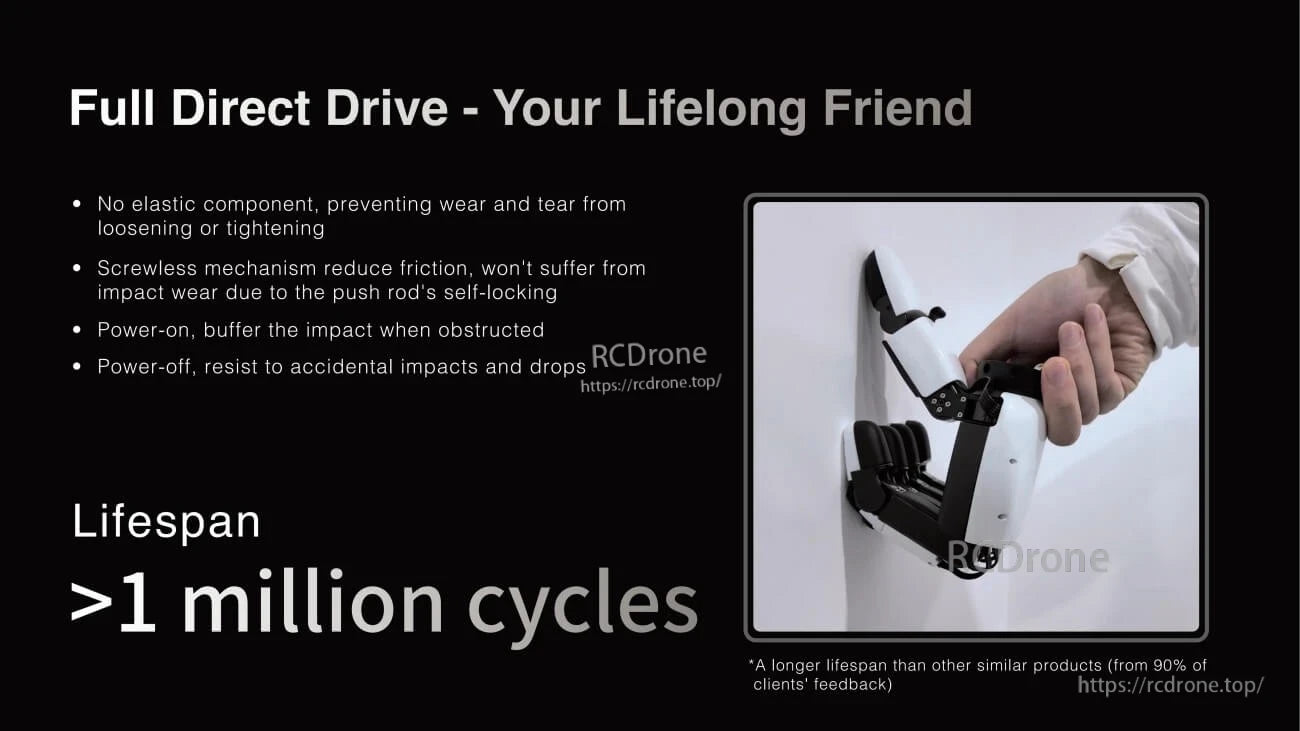
フルダイレクトドライブロボットハンドは、弾性部品やネジがなく耐久性を提供し、電源オン時の衝撃緩衝、電源オフ時の落下耐性、そして100万サイクルを超える寿命を持ち、クライアントのフィードバックに基づいて同様の製品を上回ります。

ROBOTERA XHAND 1は、MRおよびグローブ遠隔操作をサポートし、x64/ARM上のROS1/ROS2およびUbuntuと互換性があります。EtherCAT/TwinCAT/RS485を備え、xARM、Realman、URロボットアームとの統合が可能です。正確なURDFモデリングと触覚センサーシミュレーションを提供します。クロスプラットフォームの柔軟性と高度な制御プロトコルを備えた開発者向けロボティクスアプリケーションのために設計されています。
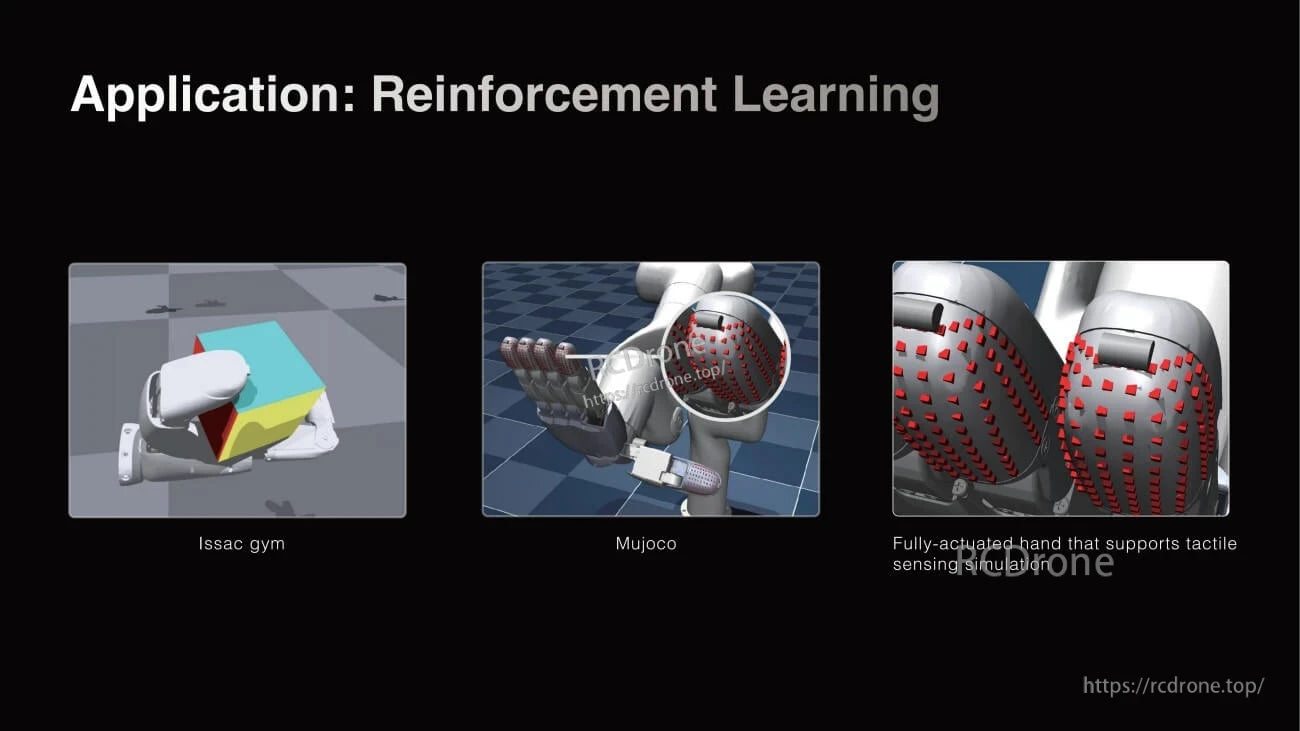
強化学習アプリケーション:Issac gym、Mujoco、および高度なロボット制御とトレーニング環境のための触覚センサーシミュレーションを備えた完全駆動ハンド。
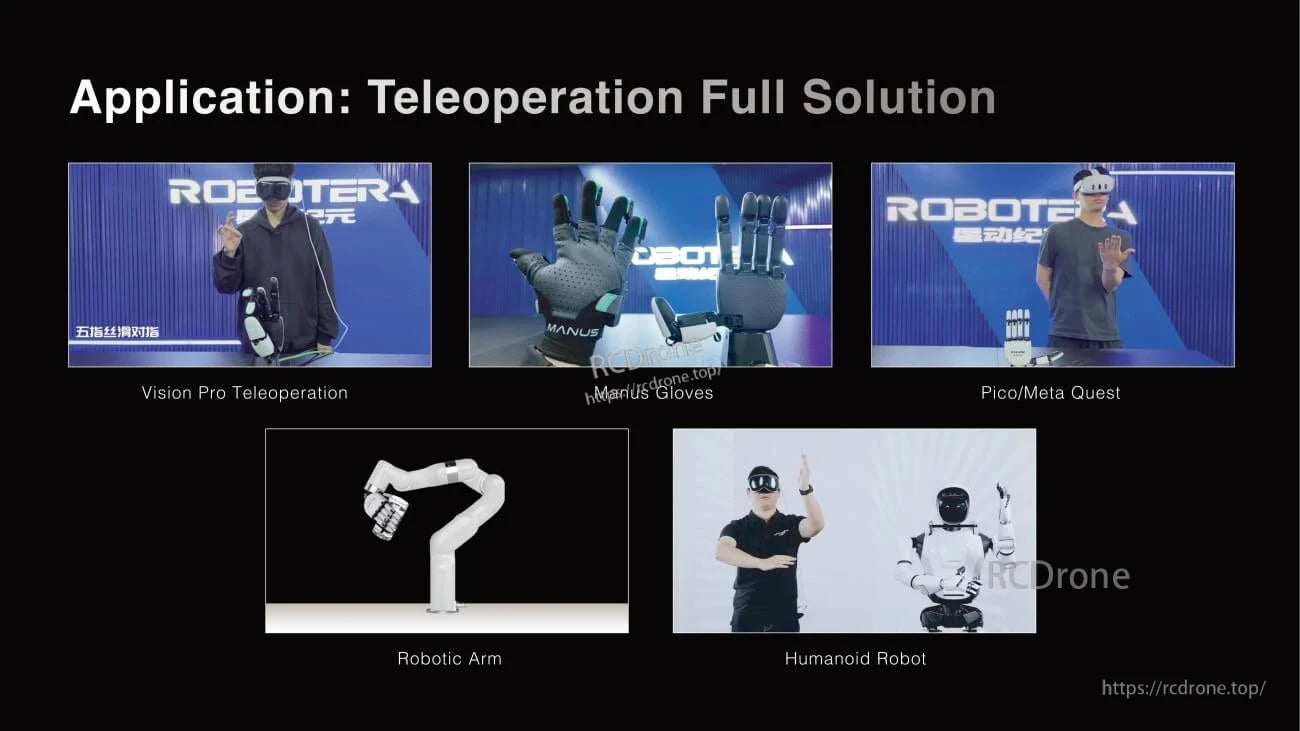
ビジョンプロ、マヌスグローブ、Pico/Meta Quest、ロボットアーム、そして高度なリモートコントロールのためのヒューマノイドロボットを特徴とするテレオペレーションの完全ソリューション。
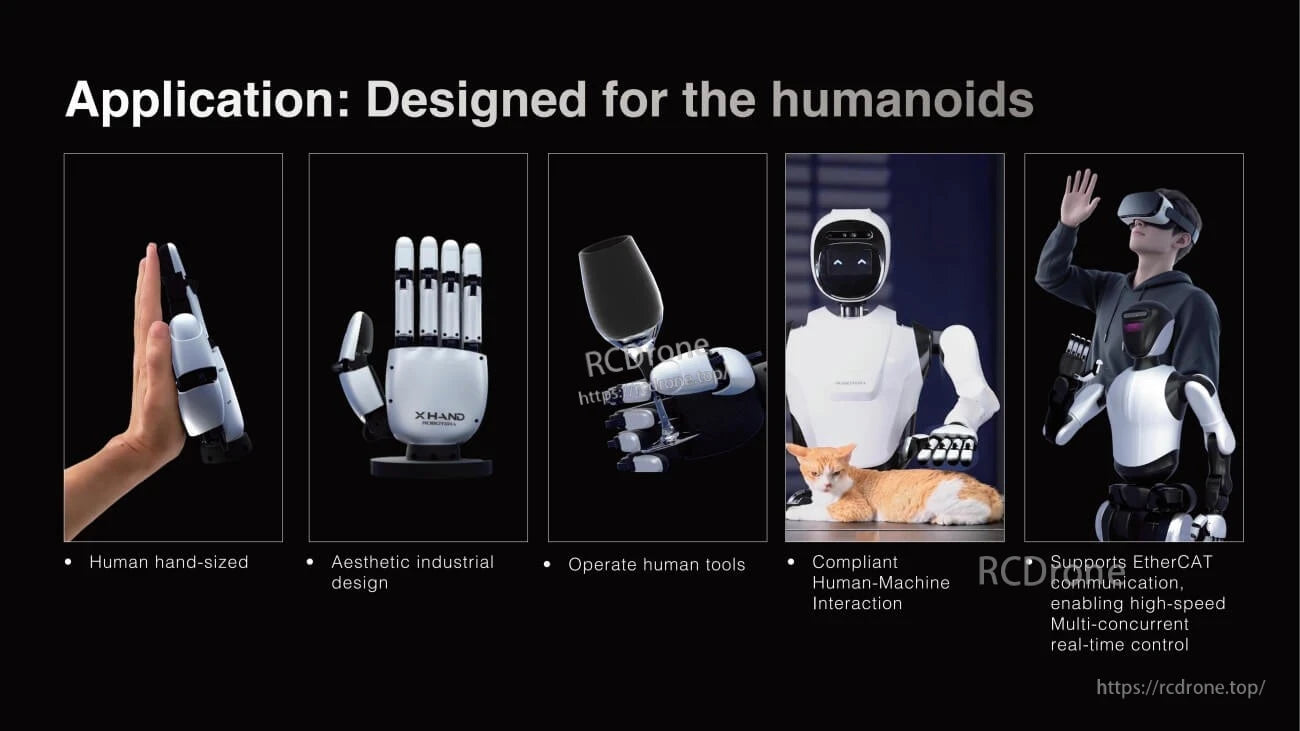
美的デザインの人間サイズのロボットハンド、ツールを操作し、適応的なインタラクションを可能にし、リアルタイム制御のためにEtherCATをサポート。
Related Collections




