SG3S-ISX031C-GMSL2F 3MP GMSL2カメラ、Sony ISX031、MAX96717F、196度HFOV、IP67、YUV422 30FPS、Fakra-Z
SG3S-ISX031C-GMSL2F 3MP GMSL2カメラ、Sony ISX031、MAX96717F、196度HFOV、IP67、YUV422 30FPS、Fakra-Z
RCDrone
通常価格
$549.00 USD
通常価格
セール価格
$549.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
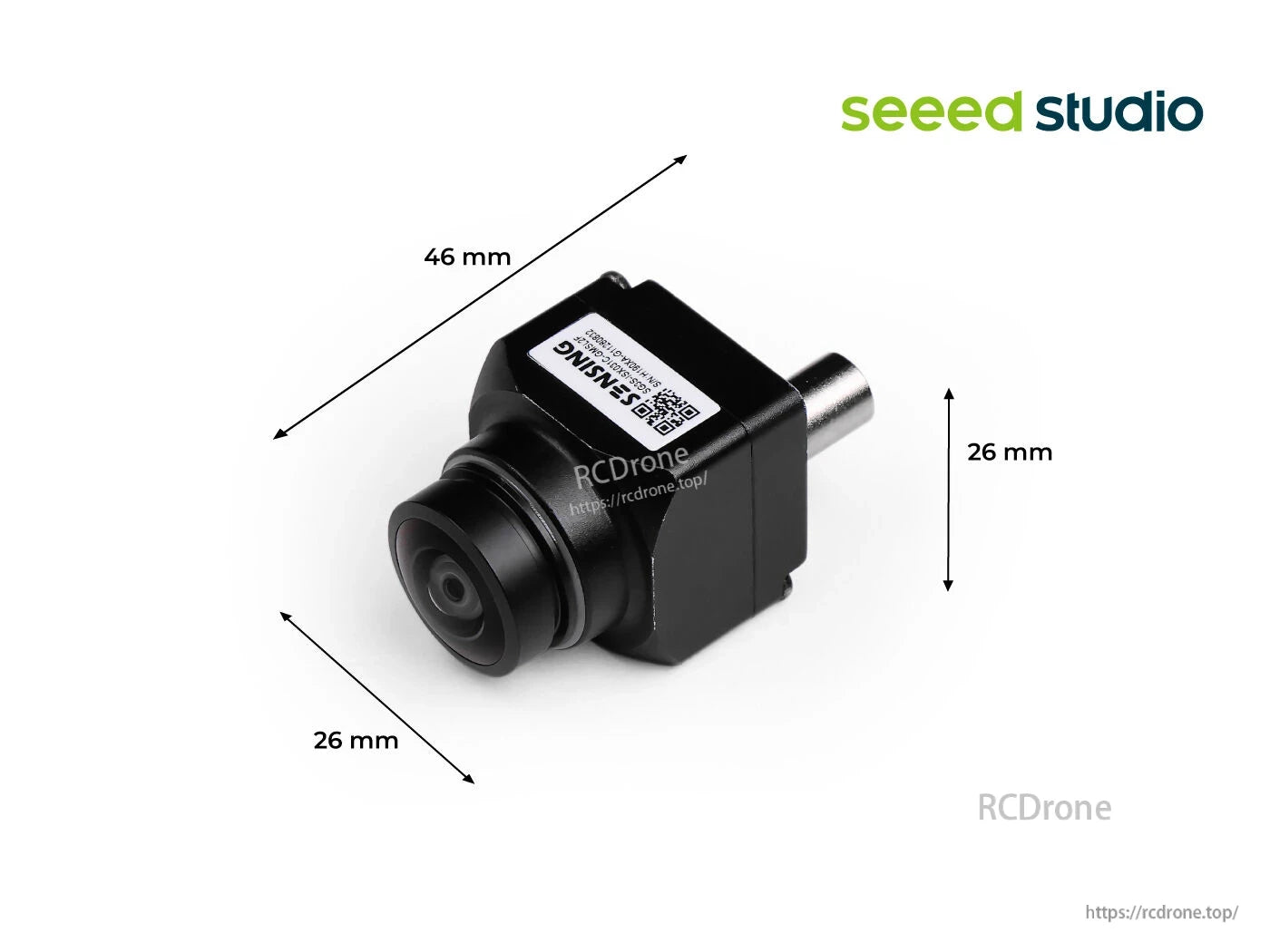
Sensing SG3S-ISX031C-GMSL2Fは、SONY製CMOSイメージセンサーISX031とMaxim製GMSL2シリアライザMAX96717Fを搭載した3MP GMSL2カメラです。水平196度、垂直154度の超広角視野角(FOV)を提供します。このモジュールは、30fpsで非圧縮3MP 8ビットYUV422を出力する、高度にチューニングされた画像信号プロセッサ(ISP)を搭載しています。IP67準拠の筐体を備え、工場でフォーカス調整および接着済みの単3形レンズが付属しています。Fakra-ZコネクタはGMSL2データとPower Over Coaxial(PoC)を提供し、ロボット工学や車載アプリケーションに最適です。HDRイメージングと外部トリガーによる複数カメラ同期にも対応しています。
主な特徴
- Fakra-Zコネクタ経由のGMSL2インターフェース。ロボット工学や自動車用途に最適
- 超広視野角:196度(水平)および154度(垂直)
- 30fpsで非圧縮3MP 8ビットYUV422を備えた内蔵ISP
- 難しい照明にも対応できるHDRサポート
- 外部トリガーと複数カメラ間の同期
- 環境保護のためのIP67定格の筐体
- AAレンズ、工場で焦点を合わせ接着済み
- 9V~16V同軸電源
仕様
| 製品 | SG3S-ISX031C-GMSL2F-H190XA |
| イメージセンサー | ソニー CMOS ISX031 |
| シリアライザー | マキシム MAX96717F |
| 解決 | 3MP |
| 出力形式 | 非圧縮3MP 8ビットYUV422 |
| フレームレート | 30fps |
| 通信インターフェース | GMSL2 |
| コネクタ | ファクラZ |
| 電圧 | 9V~16V(同軸電源) |
| 動作温度 | -40℃~85℃ |
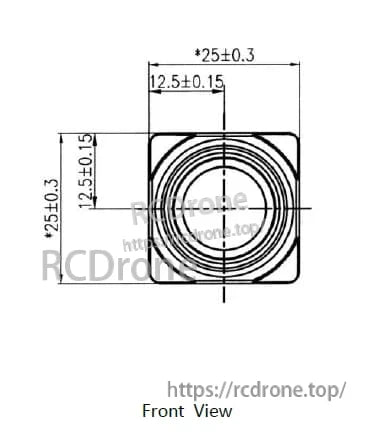
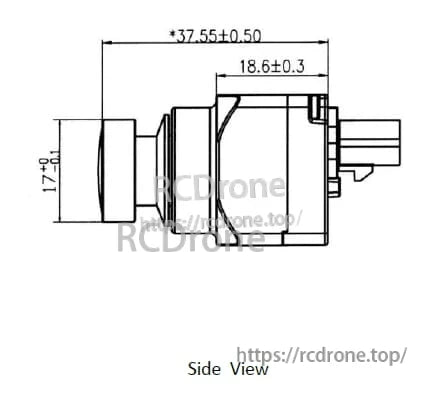
| 機械寸法 | 25mm x 25mm x 18.6mm |
| 高周波視野 | 196度 |
| VFOV | 154度 |
| 囲い | IP67定格 |
| レンズ | AAレンズ、工場で焦点を合わせ接着済み |
| HDR | サポートされている |
| 外部トリガー | サポートされている |
ハードウェアの概要
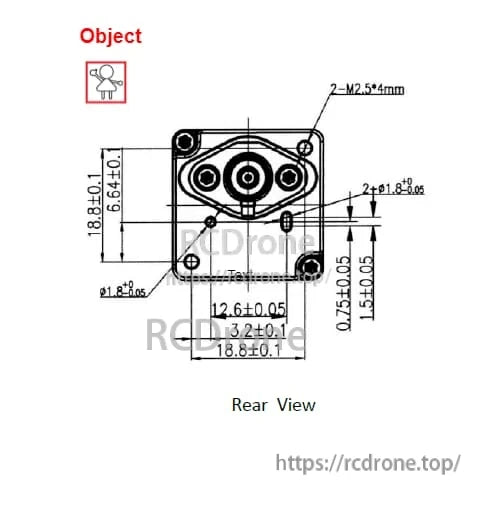
前面フットプリント25mm x 25mm、奥行き18.6mmのコンパクトな筐体。機械図面には、取り付け穴とPoC対応GMSL2用Fakra-Zインターフェースを含む、前面、側面、背面の図が記載されています。
含まれるもの
- SG3S-ISX031C-GMSL2F-H190XA x1
- 同軸メス-メスケーブル x1
アプリケーション
- ADASイメージング
- BEV検出(鳥瞰図)
- ロボット工学
Jetson AGX Orin でのリアルタイム物体検出と 3D 再構成のためのマルチ GMSL カメラ
文書
ECCN/HTS
| HSコード | 8525891900 |
| USHSCODE | 8525895050 |
| UPC | |
| EUHSコード | 8517600000 |
| 最高執行責任者 | 中国 |
詳細
車のリアビューはユニークなデザインが特徴で、長さと特徴的な後部セクションを強調し、視認性を向上させています。
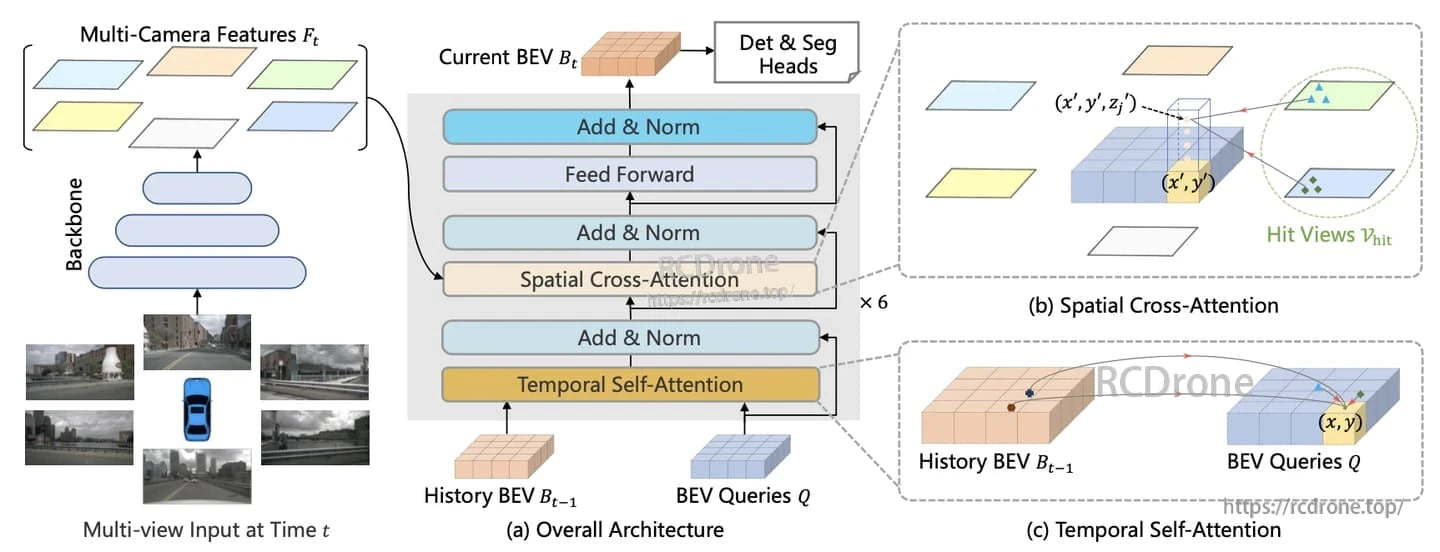
マルチカメラ システムは、バックボーン、空間的および時間的アテンション、および BEV 機能の統合を介してマルチビュー入力を処理し、検出とセグメンテーションを行います。
Related Collections