









SteadyWin GIM3510-8 小型ロボット関節モジュール、8:1遊星ギア、CANドライバー、デュアルエンコーダ、24V 60W
SteadyWin GIM3510-8 小型ロボット関節モジュール、8:1遊星ギア、CANドライバー、デュアルエンコーダ、24V 60W
SteadyWin
通常価格
$109.00 USD
通常価格
$120.00 USD
セール価格
$109.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
SteadyWin GIM3510-8 小型ロボットジョイントモジュールは、アロハモーター、8:1 プラネタリーギアリデューサー、内蔵通信ドライバー、デュアルエンコーダーをコンパクトな円筒形パッケージに統合したロボットジョイントアクチュエーターです。名目24 Vの供給(ドライバーボードに応じて広い12–40 Vまたは12–48 Vの範囲)で、高出力速度は減速後最大564.6 rpmに達し、CANバス通信を備えています。これは、機敏なヒューマノイドロボット、ロボットアーム、モバイルプラットフォーム、および精密なクローズドループモーションコントロールを必要とする他の多軸システム向けに設計されています。
主な特徴
- 高速プラネタリー減速: 定格出力速度535.5 rpm、最大564.6 rpm(GDZ34)の8:1プラネタリーギアボックスで、迅速な動きの関節に適しています。
- 広い電圧範囲: 柔軟な電源システム設計のために、12–40 V(GDZ34)または12–48 V(GDS34)の入力範囲で名目24 V動作を提供します。
- 効率的なトルク出力: トルク定数は最大0.32 N.m/A、定格トルクは最大1.68 N.m、ピークトルクは最大6.02 N.mで、軽量から中程度の負荷のロボットジョイントに効率的な電力伝達を提供します。
- CANバス統合ドライバー: 内蔵ドライバーボード(GDS34またはGDZ34)は、配線を簡素化し、ネットワーク制御を可能にするCAN通信をサポートします。
- デュアルエンコーダーフィードバック: ドライバー上の14ビットエンコーダーと出力シャフト上の2番目のエンコーダーにより、正確な位置と速度のフィードバックを提供します。
- コンパクトな構造: 外径はわずか46 mm、全長は46.5 mm(ドライバーなし)から51.5 mm(ドライバーあり)で、密な多関節レイアウトを可能にします。
- 環境耐久性: IP54保護等級、動作温度は-20°Cから+80°C、騒音レベルは60 dB未満です。
- 保護機能: 過熱、過電圧、過負荷保護は、連続運転のロボットシステムにおいて安全で信頼性のある動作を維持するのに役立ちます。
- 機械的堅牢性: 出力シャフトに対して最大75 Nの軸方向荷重および300 Nの半径方向荷重をサポートし、減速機のバックラッシュは15アーク分です。
- カスタムブレーキオプション: 電源がオフのときに保持トルクが必要なジョイントのためにカスタムブレーキ統合をサポートします。
GIM3510-8小型ロボットジョイントモジュールに関する技術サポート、カスタマイズ、または統合に関する質問は、https://rcdrone.top/までご連絡いただくか、[email protected]までメールしてください。
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
仕様
| パラメータ | 単位 | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| モデル | - | GIM3510-8 | GIM3510-8 |
| ドライバーボードモデル | - | GDS34 (SDC101) | GDZ34 |
| 定格電圧 | V | 24 | 24 |
| 電圧範囲 | V | 12–48 | 12–40 |
| 定格出力 | W | 98 | 60 |
| 定格トルク | N.m | 1.68 | 1.00 |
| ピークトルク | N.m | 3.41 | 6.02 |
| 減速後の定格速度 | rpm | 430 | 535.5 |
| 減速後の最大速度 | rpm | 529 | 564.6 |
| 定格電流 | A | 4.1 | 2.5 |
| ピーク電流 | A | 8.30 | 25.30 |
| 相抵抗 | オーム | 0.48 | 0.48 |
| 相インダクタンス | mH | 0.31 | 0.31 |
| 速度定数 | rpm/V | 22.04 | 23.53 |
| トルク定数 | N.m/A | 0.44 | 0.32 |
| 極対数 | 対 | 7 | 7 |
| ギア比 | - | 8:1 | 8:1 |
| ギアタイプ | - | 惑星ギア | 惑星ギア |
| 減速機ギア材料 | - | ALU | ALU |
| 減速機ギアバックラッシュ | arcmin | 15 | 15 |
| ドライバーなしのモーター重量 | g | 247.6 | 247.6 |
| ドライバーありのモーター重量 | g | 259.6 | 259.6 |
| ドライバーなしのサイズ(直径 x 長さ) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| ドライバーありのサイズ(直径 x 長さ) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| 最大軸方向荷重 | N | 75 | 75 |
| 最大半径方向荷重 | N | 300 | 300 |
| 騒音 | dB | <60 | <60 |
| 通信 | - | CAN | CAN |
| 出力シャフトのセカンドエンコーダ | - | はい | はい |
| 保護等級 | - | IP54 | IP54 |
| 動作温度 | °C | -20から+80 | -20から+80 |
| エンコーダ解像度(ドライバーエンコーダ) | ビット | 14 | 14 |
| 別個のエンコーダサポート | - | いいえ | いいえ |
| カスタムブレーキサポート | - | はい | はい |
マニュアル
詳細

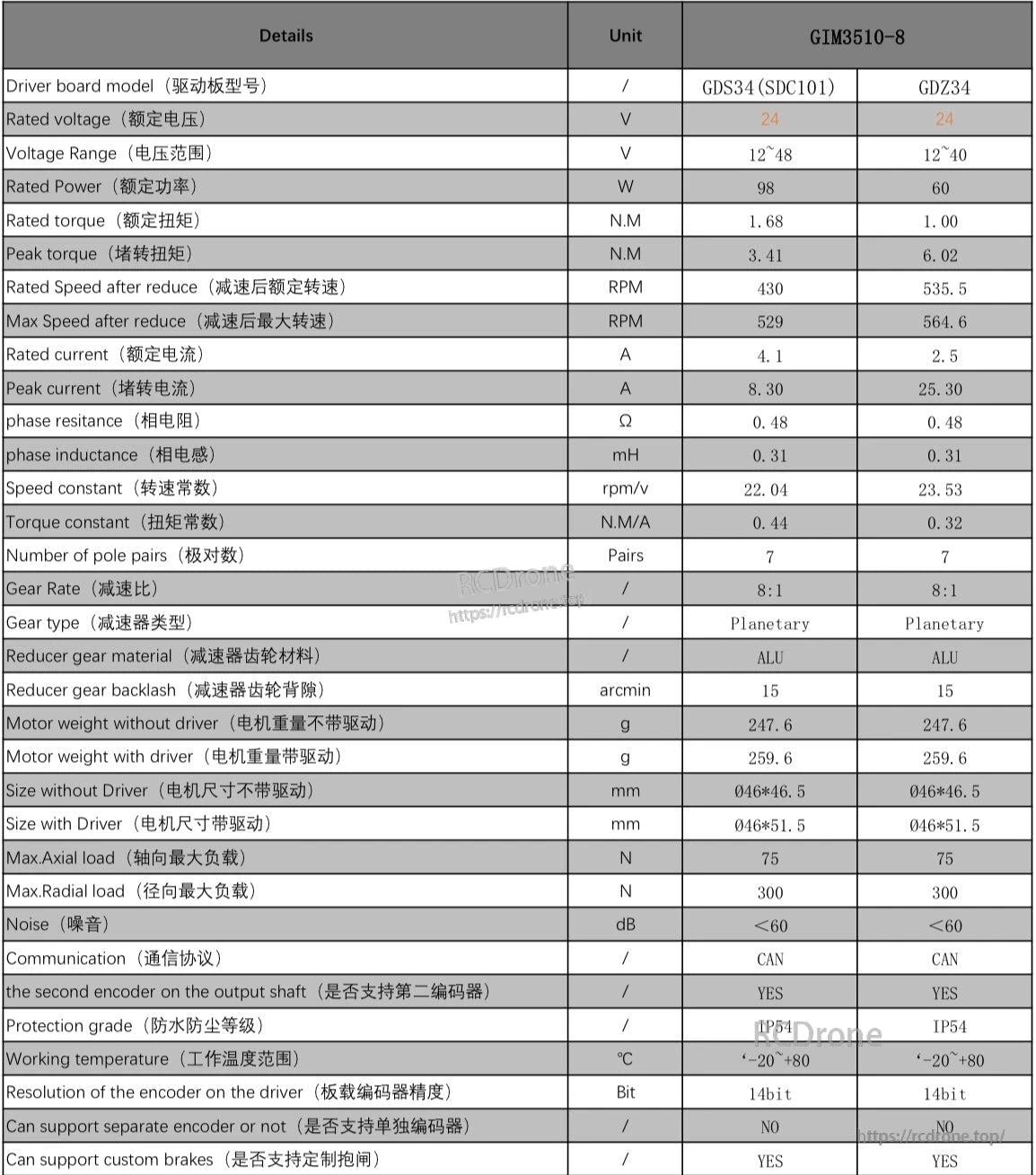
GIM3510-8 ロボットジョイント仕様は GDS34 および GDZ34 ドライバーボードを比較します。主要な指標には、電圧、電力、トルク、速度、電流、重量、サイズ、荷重容量、騒音、通信、エンコーダ、保護等級、温度範囲、およびカスタムブレーキサポートが含まれます。
Related Collections









