






Flashhobby Smart-03 サーボプログラマー(ヘリカルサーボシリーズ用)、USB接続、2S/7.4V入力
Flashhobby Smart-03 サーボプログラマー(ヘリカルサーボシリーズ用)、USB接続、2S/7.4V入力
Flashhobby
受取状況を読み込めませんでした
概要
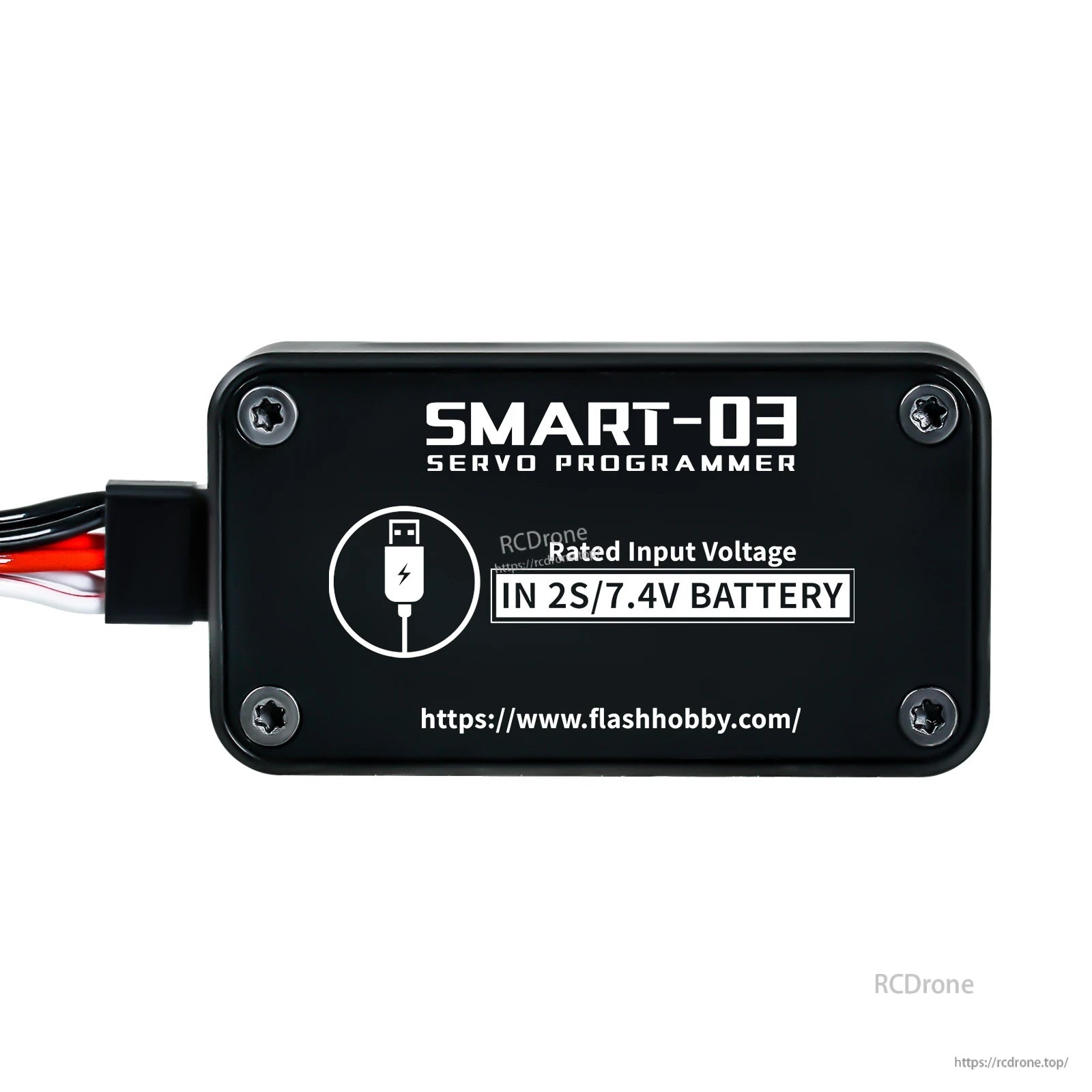
Flashhobby Smart-03 サーボプログラマーは、Flash Hobby ヘリカルサーボシリーズ用に設計されたサーボプログラマーで、パラメータ設定とサーボへの設定書き込みのために USB 経由で PC 接続をサポートしています。
主な特徴
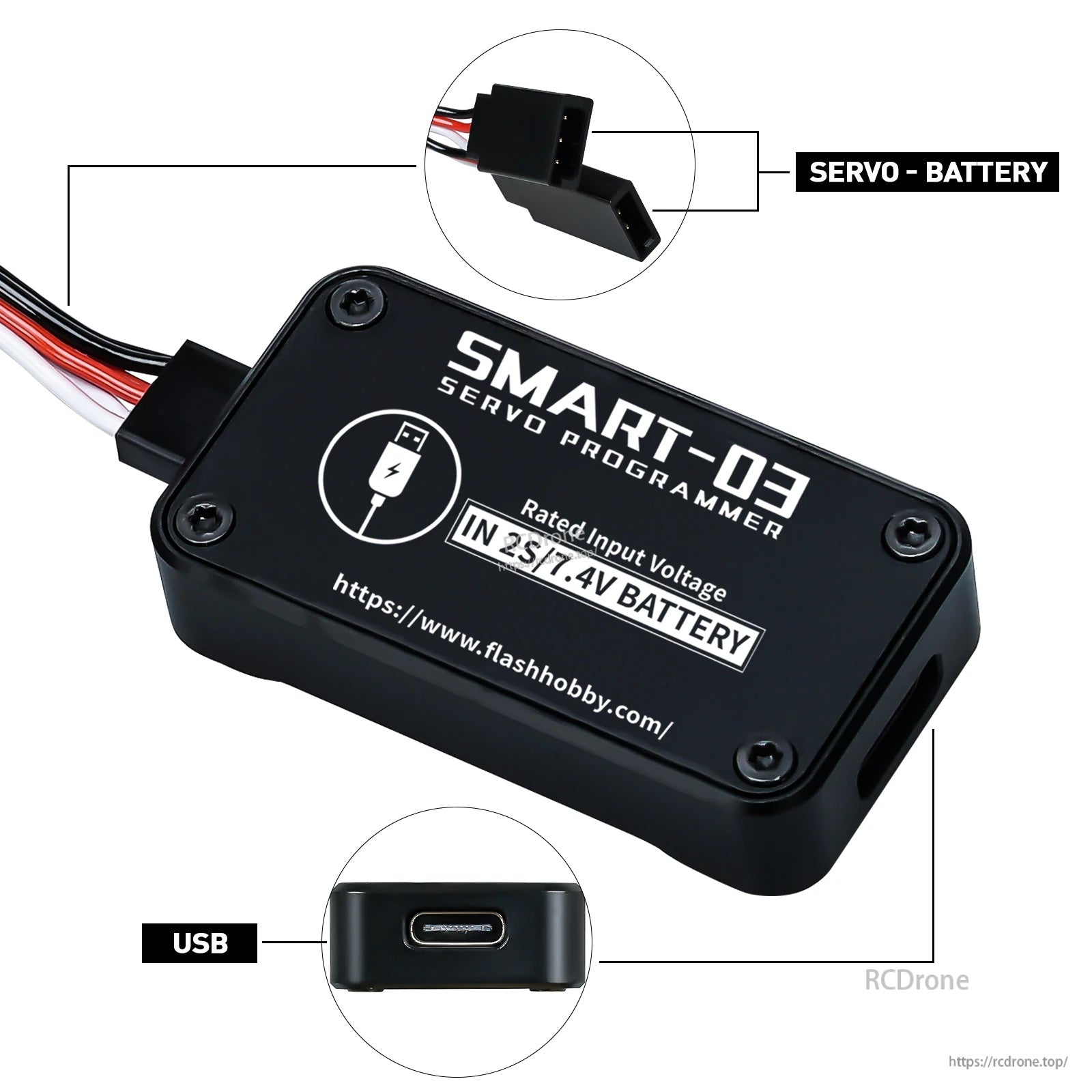
- USB PC 接続(デバイスには「USB」とラベル付けされた USB-C ポートがあります)。
- 作動ライトインジケーター。
- サーボ/バッテリー接続をサポート(「SERVO - BATTERY」とラベル付けされています)。
- PC ソフトウェア機能:パラメータの読み取り、パラメータのインポート、派生パラメータ、設定の保存、デバイスへの書き込み。
- LOW PWM / MDN PWM / HIGH PWM 用のサーボ角度位置オフセット設定エリア。
- 通常のデジタル制御信号と主流のリモートコントロールモード間の高速モード切替(モード名を選択し、次にデバイスへの書き込みを使用)。
仕様
| ブランド | FLASH HOBBY |
| モデル | SMART-03 |
| 製品タイプ | サーボプログラマー |
| 定格入力電圧 | IN 2S/7.4V バッテリー |
| PC接続 | USB (USB-Cポート) |
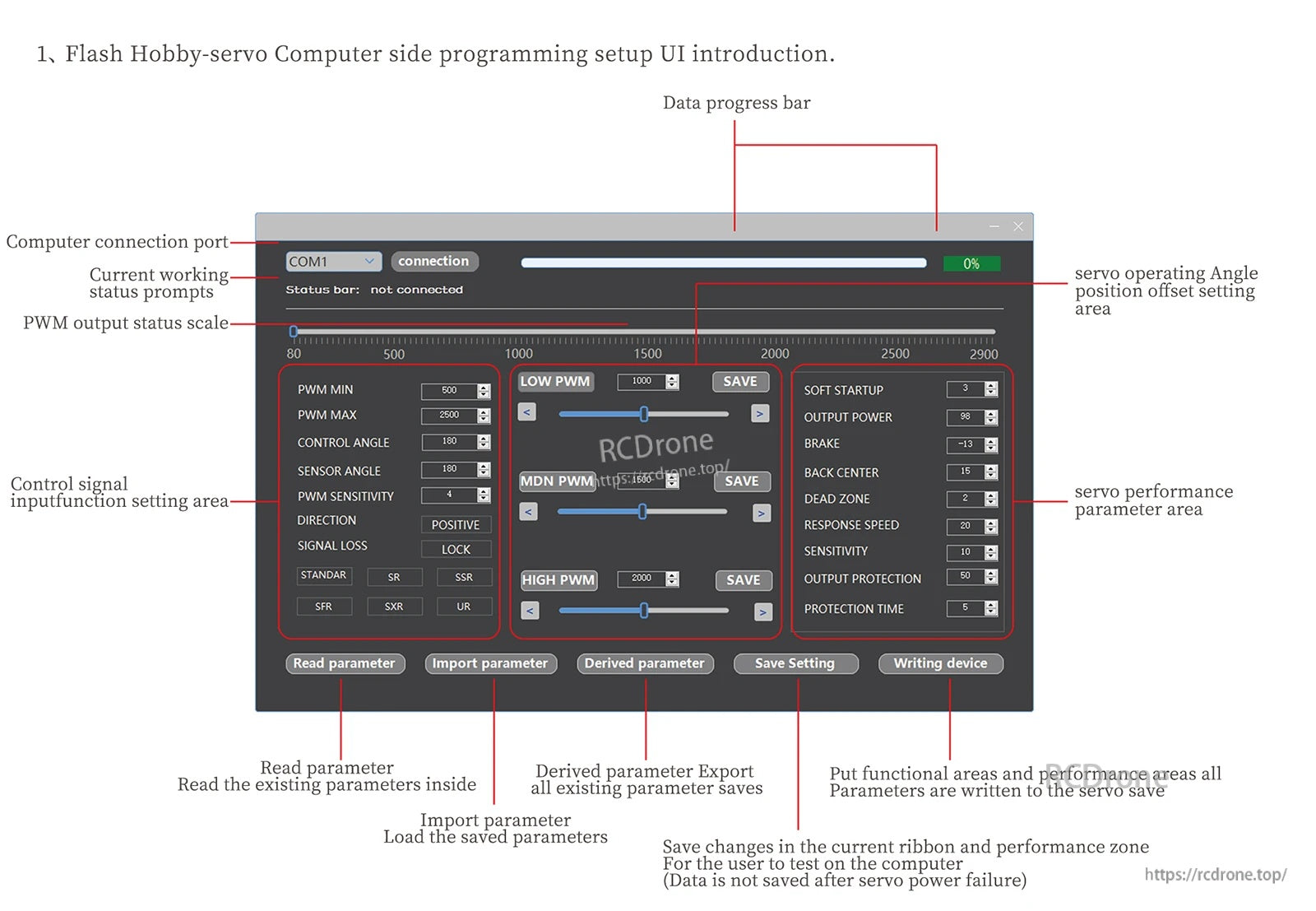
PCソフトウェアUI (表示フィールド & ボタン)
- コンピュータ接続ポート (COM選択) と「接続」ボタン; ステータスバーは現在の作業状況を表示します。
- データ進行状況バー。
- PWM出力ステータススケール。
- 制御信号入力機能設定エリアフィールド: PWM MIN, PWM MAX, CONTROL ANGLE, SENSOR ANGLE, PWM SENSITIVITY, DIRECTION, SIGNAL LOSS, さらにモードボタン: STANDAR, SR, SSR, SFR, SXR, UR。
- サーボ動作角度位置オフセット設定エリア: LOW PWM, MDN PWM, HIGH PWM (それぞれスライダーとSAVEボタン付き)。
- サーボ性能パラメータエリアのフィールド: ソフトスタートアップ、出力電力、ブレーキ、バックセンター、デッドゾーン、応答速度、感度、出力保護、保護時間。
- 下部ボタン: パラメータを読む、パラメータをインポート、派生パラメータ、設定を保存、デバイスに書き込み。
パラメータノート(表示説明)
- ソフトスタートアップ: スロースタート機能; 値が大きいほど、速度が速くなる。
- 出力電力: モーターの最大出力電力のパーセンテージ(最大100、最小0)。
- ブレーキ: ブレーキとオーバーシュート設定; 値は-16から+16を超えることはできない。
- 剛性設定ノート: 値が高いほど剛性が大きく、ジッターしやすくなる; 値の範囲は0から63。
- デッドゾーン: 中点のデッドゾーンに戻る; 値が小さいほど、負荷の戻りがより正確になり、ジッターしやすい。
- 応答速度: 値が高いほど速度が速くなり、ジッターが発生しやすくなります。
- 感度: 値が低いほど感度が高くなります。
- 出力保護の注意: “出力電力がブロックされる割合”; 値が大きいほどモーターが損傷しやすくなります。
- 保護時間の注意: 値が小さいほど保護に入るのが早くなります; 値が大きいとモーターが損傷する可能性があります。
- PWM MIN: PWM制御信号の最小入力値。
- PWM MAX: PWM制御信号入力の最大値。
- 制御角度: ステアリングギアの最大回転角。
- センサー角度: 角度センサーの最大角度(特別な要件がない限り変更できません)。
- PWM感度: 値が高いほど解像度が低くなる; 値が小さいほど解像度が高くなる。
- 方向: 前進または後退の回転設定。
- 信号損失: 制御信号が失われた場合、ステアリングギアは現在の位置をロックするか、ロック力を解除します。
プログラミングシーケンス(表示される指示)
- ステップ1:コンピュータ接続ポート番号を選択し、接続をクリックしてプログラミングカードに接続してアクセスします。
- ステップ2:3つのボタンをクリックしてサーボが回転するか確認します。回転しない場合は、PCプログラミングカードとサーボの接続が正しいか確認してください。
- ステップ3:パラメータを読み取るをクリックしてサーボ内部の生パラメータを読み取ります。上部のプログレスバーは読み取り成功率を100%に向上させます(各プログラミング変更の前に必要です。このステップは最初に実行する必要があります)。
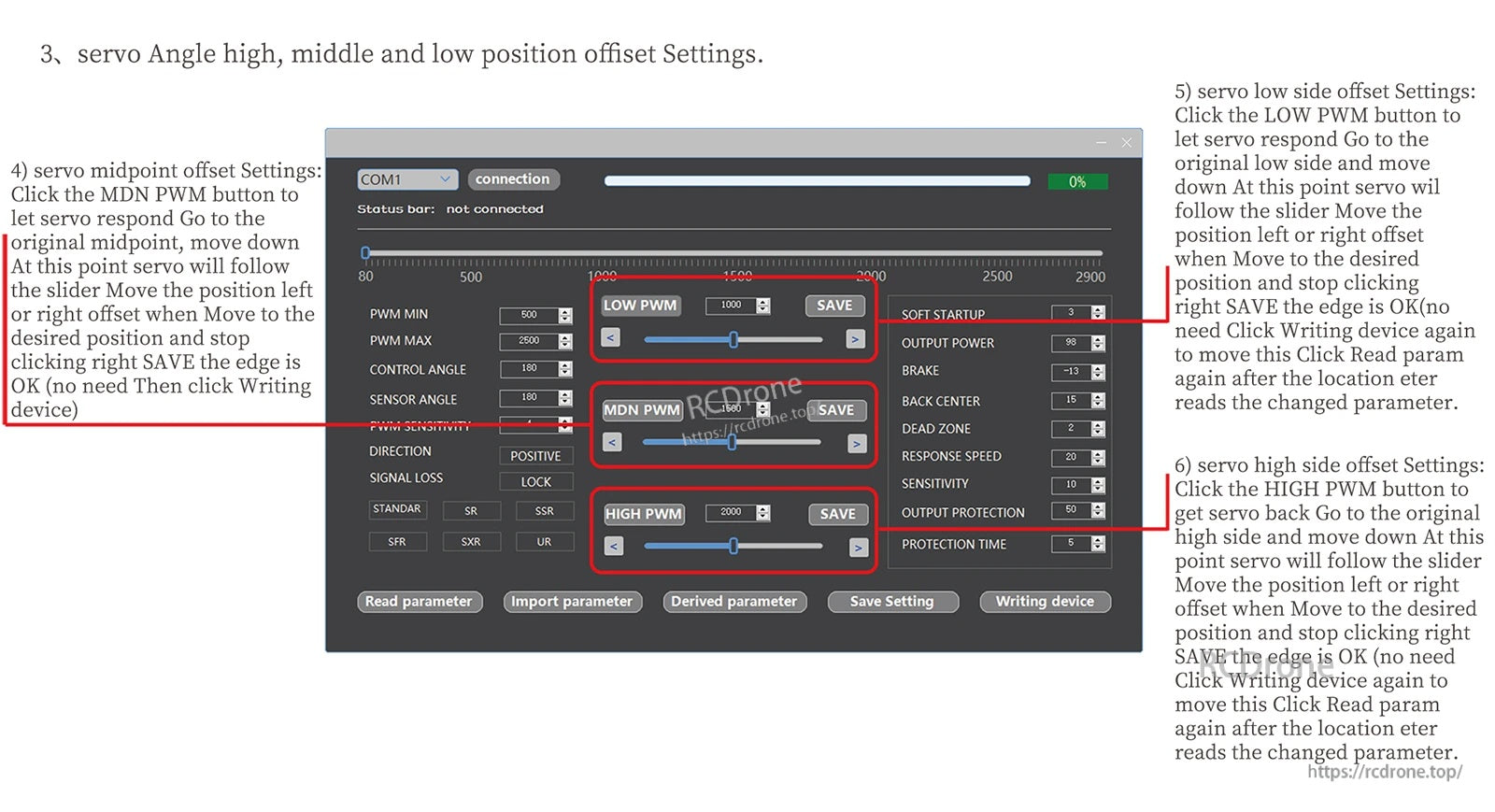
角度オフセット設定(表示される指示)
- 中間点オフセット:MDN PWMをクリックしてサーボが応答し、元の中間点に戻るようにし、スライダーで調整します。左または右に移動して希望の位置を設定し、保存をクリックします。その後、デバイスに書き込みをクリックします(移動するために再度デバイスに書き込みをクリックする必要はありません)。
- 低側オフセット:LOW PWMをクリックしてサーボが応答し、元の低側に戻るようにし、スライダーで調整します。左または右に移動して希望の位置を設定し、SAVEをクリックします(移動するために再度Writing deviceをクリックする必要はありません)。位置が変更されたパラメータを読み取った後、再度Read parameterをクリックします。
- 高側オフセット:HIGH PWMをクリックしてサーボが応答し、元の高側に戻るようにし、スライダーで調整します。左または右に移動して希望の位置を設定し、SAVEをクリックします(移動するために再度Writing deviceをクリックする必要はありません)。位置が変更されたパラメータを読み取った後、再度Read parameterをクリックします。
同梱物
- Flashhobby SMART-03 サーボプログラマー
- USBケーブル
サポート
ヘリカルサーボシリーズのセットアップ支援や互換性に関する質問は、[email protected] orに連絡するか、https://rcdrone.top/. をご覧ください。
詳細

Flashhobby SMART-03 サーボプログラマーは USB-C 経由で接続され、サーボ/バッテリーリードが含まれており、2S/7.4V バッテリーの定格入力を持っています。
Flashhobby Smart-03 PC ソフトウェアは、PWM 制限、制御角度、方向、およびサーボ応答パラメータを調整するためのメニューを提供します。

Flashhobby Smart-03 は、COM ポート接続を持つ PC インターフェースを使用し、PWM 範囲とサーボ応答設定を調整するための読み取り/保存コントロールを備えています。
Smart-03 プログラミングソフトウェアでは、デバイスに保存する前に PWM エンドポイント、センター/オフセット位置、およびその他のサーボパラメータを調整できます。

Smart-03 サーボプログラマーソフトウェアは、サーボチューニングのための調整可能な PWM、角度、デッドゾーン、および応答速度設定を提供します。

Flashhobby Smart-03 サーボプログラマーには、USB-C 接続と迅速なセットアップのためのサーボリードポートを備えたコンパクトなプログラミングモジュールが含まれています。

Flashhobby Smart-03サーボプログラマーは、明確にラベル付けされたS/+/-出力とUSB接続を使用して、簡単なサーボ設定を行います。
Flashhobby Smart-03サーボプログラマーは、サーボプログラミング中にセットアップに電力を供給するための2S/7.4Vバッテリー入力がラベル付けされています。

Flashhobby Smart-03サーボプログラマーは、USBポートと明確にラベル付けされた+/−/Sサーボ接続を備えており、迅速なセットアップが可能です。
Flashhobby SMART-03サーボプログラマーは、USBポートとサーボからバッテリーへのリードを備えており、2S 7.4Vバッテリーを使用した迅速なベンチセットアップが可能です。

Flashhobby Smart-03サーボプログラマーにはUSBポートとサーボリードアダプターが含まれており、重さは約20gです。

Flashhobby Smart-03サーボプログラマーはUSB接続を使用し、セットアップと調整のために2S/7.4Vバッテリー電源の定格入力をサポートしています。
Related Collections






