




Flywoo GOKU GM10 Nano V3 GPSモジュール(コンパス付き)、M10050 GNSS、2.6g、12x17x5mm、6ピン
Flywoo GOKU GM10 Nano V3 GPSモジュール(コンパス付き)、M10050 GNSS、2.6g、12x17x5mm、6ピン
FLYWOO
通常価格
$31.49 USD
通常価格
セール価格
$31.49 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
提供された情報に基づくと、GM10 V3シリーズは、前のGM8 V2と比較して、より高速な衛星検索のために最新のM10050 GNSSチップを使用しています。セットアップの手助けや互換性に関する質問は、[email protected] orに連絡するか、https://rcdrone.top/ .
主な特徴
- ナノサイズと軽量:2.6g
- 統合コンパス
- プラグアンドプレイ(はんだ付け不要)
- 6ピンパッドコネクタ
- GPSモジュール。3つのモジュール。
互換性の注意事項
- 注意:GOKU GM10 V3 GPSのチップは、提供されたメモでM1005として参照されています。Betaflight (BF) 4.3.xファームウェアのみが Ubloxプロトコルを使用できます。BF 4.2。x およびそれ以前のは、 NMEAプロトコルのみを使用できます。ノートには、2つのプロトコル間にパフォーマンスの違いはないと記載されています。
- BETAFLIGHT: 4.3.0. 以上のファームウェアを使用してください。
- INAV: 最新の6.0.0コンフィグレーター, および5.0.0. 以上のファームウェアを使用してください。
仕様
| ブランド | FLYWOO |
| モデル | GM10 NANO V3 GPS w/コンパス |
| 寸法 | 12mm*17mm*5mm |
| 重量 | 2.6g |
| コネクタ | 6ピンパッド |
| チップセット | M10050(第10世代チップ) |
| 受信フォーマット | GPS、GLONASS、Galileo、BeiDou、QZSSおよびSBAS |
| デフォルトプロトコル | GPS、Galileo、BeiDou |
| 周波数 | GPS L1、GLONASS L1、BeiDou B1、SBAS L1、Galileo E1 |
| チャンネル | 72検索チャンネル |
| 感度(追跡) | -162dBm |
| 感度(再取得) | -160dBm |
| サポートレート | 4800bpsから921600bps(デフォルト115200bps) |
| データレベル | TTLまたはRS-232(デフォルトTTLレベル) |
| データプロトコル | BF4.3.X(UBLOX)/ BF4.2.X (NMEA) |
| 出力周波数 | 1Hz-10Hz (デフォルト 10Hz) |
| 運用限界 (高度) | 最大 50,000m |
| 運用限界 (速度) | 最大 500m/s |
| 運用限界 (加速度) | 4g未満 |
| VCC | DC電圧: 3.3-5V |
| 動作温度 | -40 °C ~ +85°C |
| 保管温度 | -40°C ~ +105°C |
| インジケーター | PPS LED: 赤。GPSが固定されていないときにPPS LEDが点灯し、固定されると消灯します。 |
| モジュールピン (テキスト) | RX, TX, 3.3-5V, GND |
| コンパス/GPSパッドラベル(図) | T, R, G, V, C, D |
| フライトコントローラーパッドラベル(図) | TX, RX, GND, 5V, SCL, SDA |
| GM10 NANO V3(コンパス)ラベル(図) | SD-SC-V-G-RX-TX |
操作ガイド
コンパス方向オプション(表示)
- デフォルト
- CW 0°
- CW 90°
- CW 180°
- CW 270°
- CW 0° フリップ
- CW 90° フリップ
- CW 180° フリップ
- CW 270° フリップ
- カスタム
Betaflight GPSおよびGPSレスキューモード設定(表示)
- シリアルポートを開く: GPS / 115200ボーレート.
- GPSスイッチをオンにし、UBLOX/NMEAプロトコルを設定します。
- RXLOSS制御救助モードチャンネルを設定します(例:AUX 2 GPS RESCUE, 値 2000)。
- GPS救助モードオプションを選択します(例の値を示します):角度 32; 初期高度(メートル) 50; 降下距離(メートル) 200; 自宅までの最小距離(メートル) 100; 地上速度(メートル/秒) 20.00; スロットル最小 1100; スロットル最大 1600; スロットルホバリング 1280; 上昇率(メートル/秒) 5.00; 降下率(メートル/秒) 1.50; 最小衛星数 5; 高度モード 最大高度; 整合性チェック オン.
含まれているもの
- 1x GM10 NANO V3 GPS w/コンパス
- 1x 100mm ケーブル
- 1x 銅箔
詳細
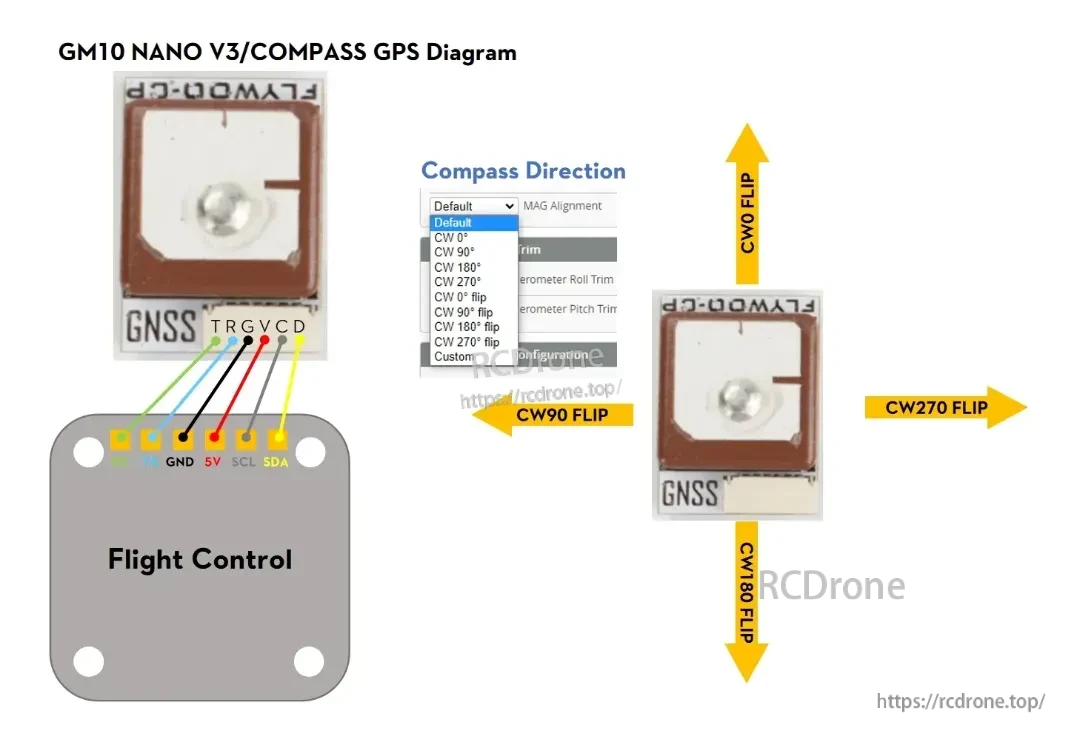
GM10 Nano V3 GPSの配線は、TX/RXに加えて5VおよびI2C(SCL/SDA)を使用し、異なるモジュールの向きに対してコンパス方向のオプションがあります。

Flywoo GOKU GM10 Nano V3 GPSは、フライトコントローラーに5VおよびGND電源、UART TX/RXで接続され、コンパス用のSDA/SCLがオプションです。

Flywoo GOKU GM10 Nano V3 GPSは、より速い衛星検索のために設計されており、30以上の衛星の追跡をサポートしています。

GPSシリアルポートを115200ボーに設定し、救助モードの設定のためにUBLOX/NMEAプロトコルでGPSスイッチを有効にします。

GPS救助モードは、GPS RESCUEのためにAUXチャネルを割り当て、Betaflightでホームに戻るパラメータを調整することで設定できます。
Related Collections




