SteadyWin GIM4305-10 プラネタリー減速モーター — 48W、10:1減速比、定格トルク1N·m、300–366RPM、CAN、IP54、ロボットアクチュエータ用
SteadyWin GIM4305-10 プラネタリー減速モーター — 48W、10:1減速比、定格トルク1N·m、300–366RPM、CAN、IP54、ロボットアクチュエータ用
SteadyWin
通常価格
$132.00 USD
通常価格
セール価格
$132.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
SteadyWin GIM4305-10 プラネタリーレデューサモーターは、統合されたSDC101ドライバーとCAN通信を備えたコンパクトなプラネタリーレデューサモーターです。精密なアクチュエーションのために設計されており、定格電圧は24V(12-36V範囲)で、48Wの電力を供給し、10:1の減速後に1 N·mの定格トルク(スタールトルク3.47 N·m)を提供します。GIM4305-10はIP54等級で、14ビットエンコーダーと別々のエンコーダー接続をサポートし、カスタムブレーキサポートも利用可能です。内蔵保護機能には、過熱、過電圧、過負荷の監視が含まれています。
カスタマーサービスおよび技術サポートのお問い合わせは、[email protected]まで、またはhttps://rcdrone.top/をご覧ください。
主な特徴
- プラネタリーギアレデューサ、出力トルクと位置制御を向上させる10:1比率。
- ネットワーク制御のためのCAN通信を備えた統合SDC101ドライバー。
- 減速後の定格速度300 RPM、最大366 RPM。
- エンコーダー: 14ビット内蔵、別々のエンコーダー入力をサポート。
- コンパクトなエンベロープ Ø53×26mm と低質量 (ドライバーなしで140g; ドライバーありで150g)。
- 機械的定格: 最大軸方向荷重 125N、最大半径方向荷重 500N、ギアバックラッシュ 15アーク分。
- 動作温度範囲 -20°C から +80°C、音響ノイズ <60 dB。
- 減速機のギア材料: ALU または スチール。カスタムブレーキサポートが利用可能。
仕様
| モデル | GIM4305-10 |
| ドライバーモデル | SDC101 |
| 定格電圧 | 24V (12-36V範囲) |
| 電力 | 48W |
| 定格トルク (減速後) | 1 N·m |
| スタールトルク | 3。47 N·m |
| 定格速度(減速後) | 300 RPM |
| 最大速度(減速後) | 366 RPM |
| 定格電流 | 2A |
| スタート電流 | 5.6A |
| 相抵抗 | 1.15 Ω |
| 相インダクタンス | 0.41 mH |
| 速度定数 | 15.25 rpm/v |
| トルク定数 | 0.62 N·m/A |
| 極対数 | 14対 |
| ギア比 | 10:1 |
| ギアタイプ | 惑星ギア |
| 減速機ギア材料 | アルミまたはスチール |
| 減速機ギアバックラッシュ | 15アーク分 |
| モーター重量(ドライバーなし) | 140 g |
| モーター重量(ドライバーあり) | 150 g |
| サイズ(ドライバーなし) | Ø53×26 mm |
| サイズ(ドライバーあり) | Ø53×26 mm |
| 最大軸方向荷重 | 125 N |
| 最大半径方向荷重 | 500 N |
| 騒音 | <60 dB |
| 通信 | CAN |
| セカンドエンコーダ | なし |
| 保護等級 | IP54 |
| 動作温度 | -20°Cから+80°C |
| エンコーダ解像度 | 14ビット |
| 独立エンコーダサポート | はい |
| カスタムブレーキサポート | はい |
用途
- ヒューマノイドロボットおよびロボットジョイント
- ロボットアームおよびアクチュエーションモジュール
- エクソスケルトンおよびウェアラブル支援デバイス
- 四足歩行ロボットおよび脚ジョイント
- AGV駆動モジュールおよびモバイルロボティクス
- オープンソースロボットプロジェクト (e.g., Pupper V3統合)
マニュアル
詳細
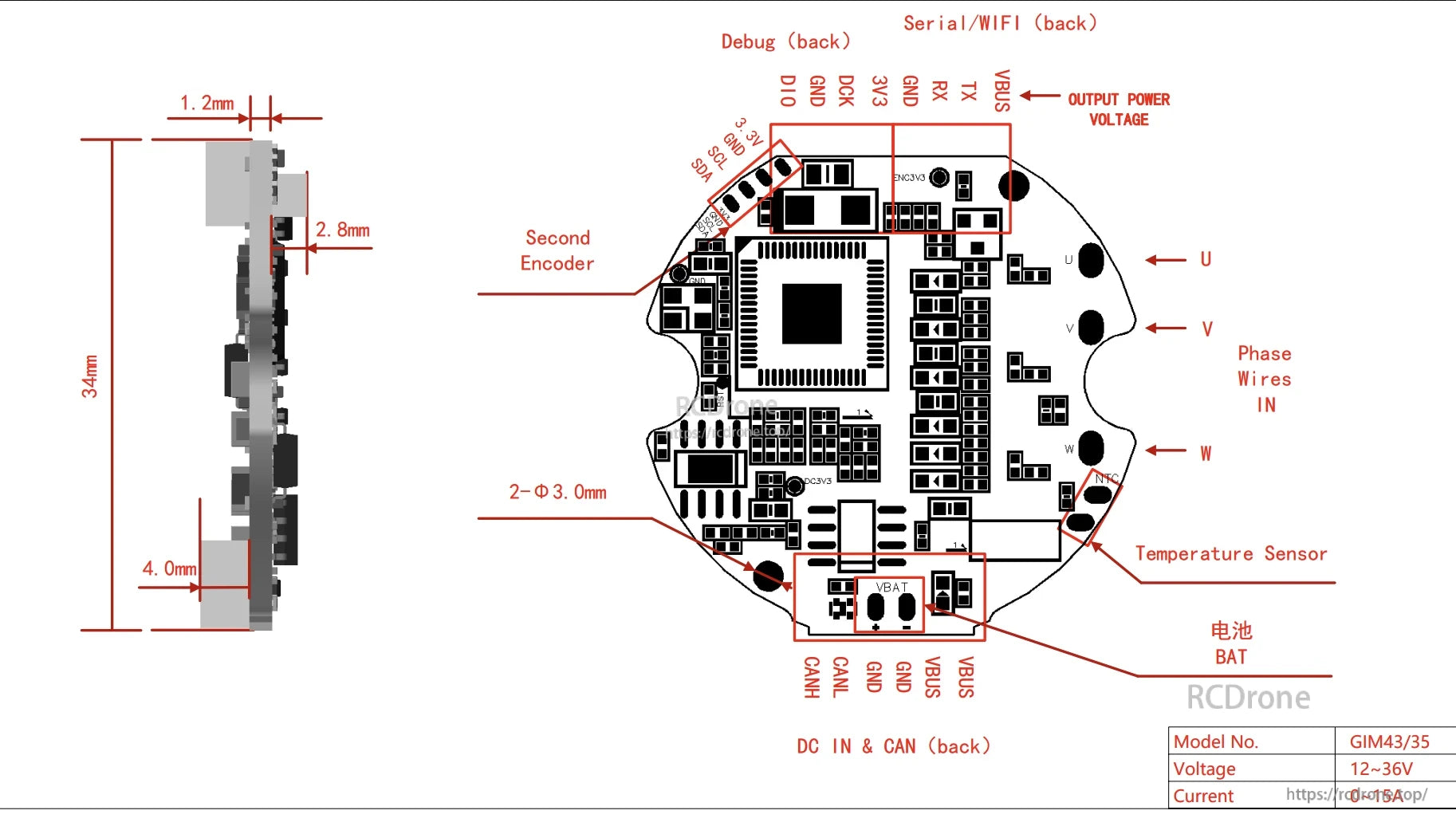
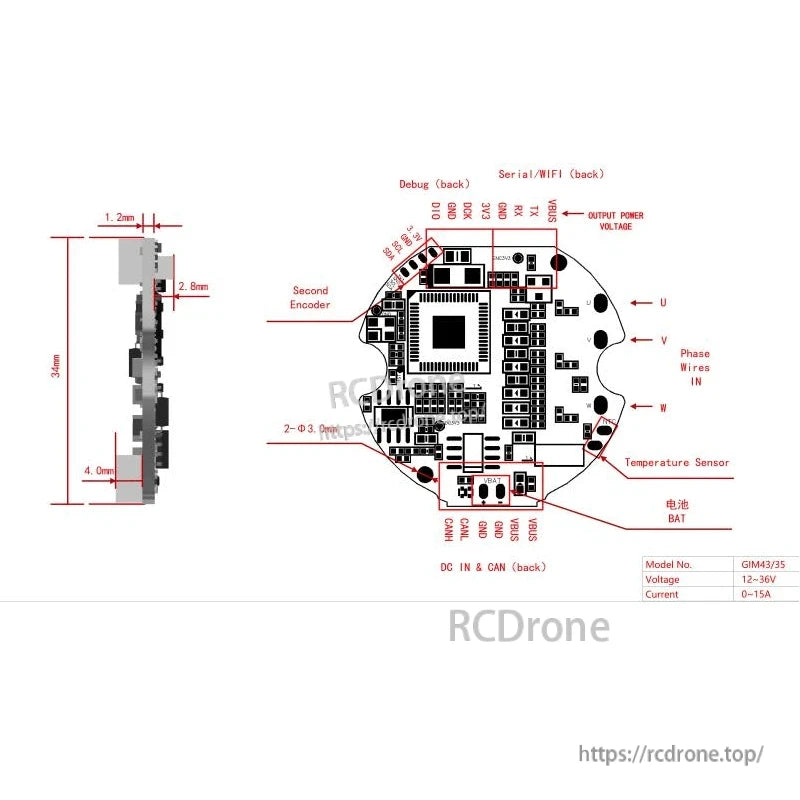
SteadyWin GIM43/35モーターPCB図は、接続、寸法、コンポーネント—エンコーダ、位相ワイヤ、温度センサー、バッテリー入力、デバッグポート—を示し、12–36Vおよび0–15Aの電流で動作します。
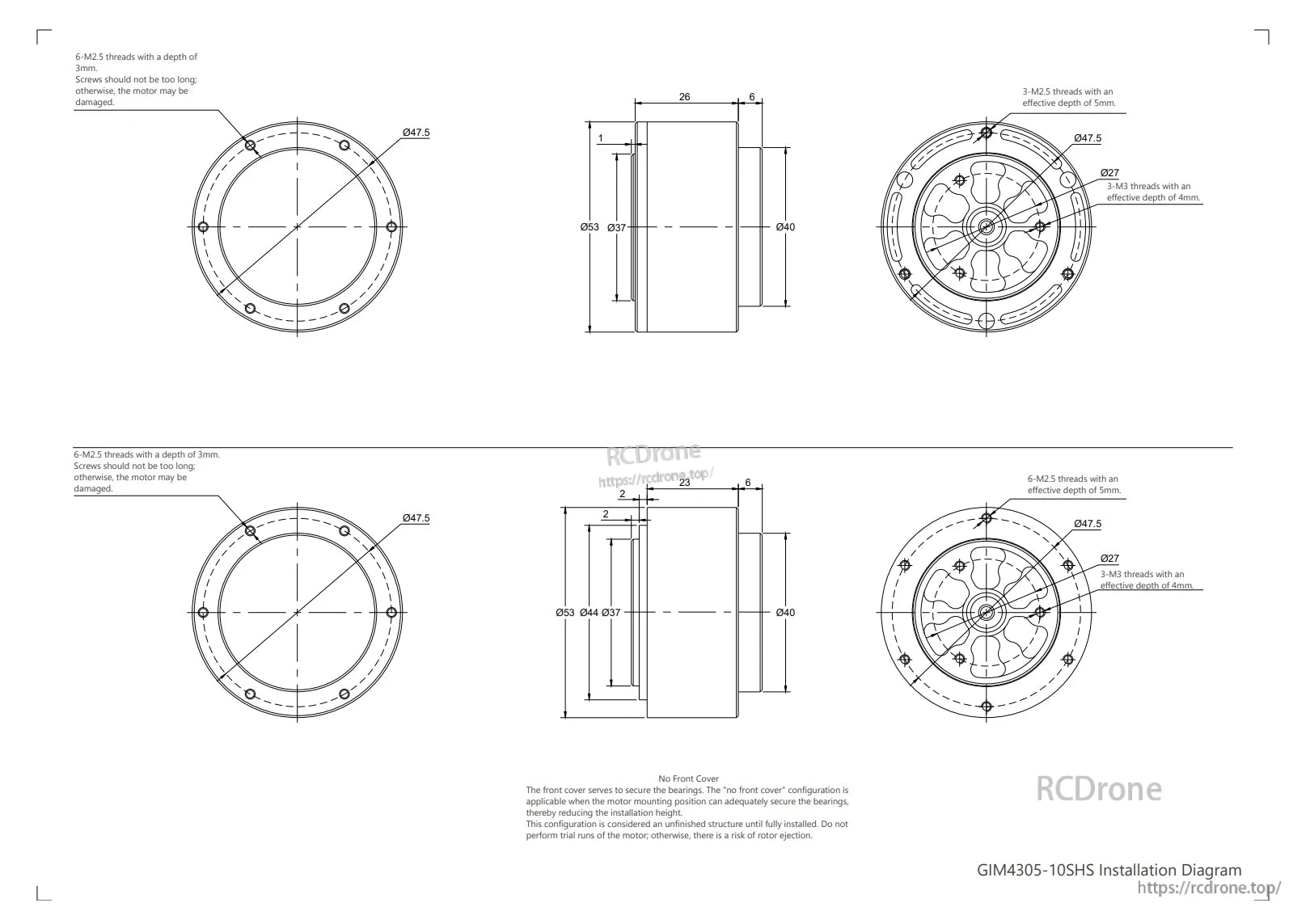
GIM4305-10SHSモーターインストールの技術図は、寸法、スレッド仕様、損傷を防ぐためのネジ長警告、前面カバーの有無による構成を示しています。
Related Collections