SU17 研究用ドローン - MID-360 LiDAR、クアッドカメラ SLAM、EGO-Swarm を備えた PX4 オープンソース産業用ドローン開発
SU17 研究用ドローン - MID-360 LiDAR、クアッドカメラ SLAM、EGO-Swarm を備えた PX4 オープンソース産業用ドローン開発
RCDrone
受取状況を読み込めませんでした
概要
SU17リサーチドローンは、 6000mAhバッテリー、 MID-360 ライダー 3Dマッピングの場合、 4台カメラSLAMシステム 正確な位置特定と統合された GPS+GLONASS測位離陸重量は 2.3キロ そして 積載量200g、それは提供します 飛行時間21分 視覚的位置決めモードでは、Prometheusソフトウェアを搭載し、ターゲット認識、経路計画、自律ナビゲーションをサポートし、 業界標準 研究とイノベーションのためのソリューション。
ハードウェアパラメータ
航空機
| パラメータ | 説明 |
|---|---|
| 航空機の種類 | クワッドコプター |
| 離陸重量(約) | 2.3 kg(保護カバーとバッテリーを含む) |
| 対角距離 | 320ミリメートル |
| 寸法 | 長さ:442mm、幅:388mm、高さ:174mm(保護カバーを除く) |
| 最大積載量 | 200グラム |
| ホバリング飛行時間 | 約 13 分 (ホバーが 100% で、0% 未満ではない場合)、視覚的な位置決め: 21 分 |
| ホバリング精度 | GPS: 垂直 ±1.5 m、水平 ±2.0 m |
| 3D LiDAR SLAM: 垂直 ±0.08 m、水平 ±0.08 m | |
| 4カメラビジュアルSLAM: 垂直±0.05m、水平±0.05m | |
| 風抵抗レベル | レベル4 |
| 動作温度 | -10°C~40°C |
| メインMCUチップ | STM32H743 |
| 国際ミュー | ICM42688/BMI088 |
| バロメーター | MS5611 |
| コンパス | QMC5883L |
| インタフェース | USBタイプC |
オンボードコンピューター
| パラメータ | 説明 |
|---|---|
| プロセッサ | インテル Core i5-8365U |
| メモリ容量 | 8GB |
| メモリ周波数 | LPDDR3@2133MHz |
| ストレージ | 256GB NVMe SSD |
| ネットワークポート | 百度アポロイーサネットX2、 12V@3A power電源、IEEE 1588-2008(PTP v2)をサポート |
| シリアルポート | TTLシリアルポートX2、5V/3.3V@500mA power供給 |
| USB | タイプC X2 (USB2.0 x 1、USB3.0 x 1) |
| HDMI | HDMI1.4 |
パワーバッテリー
| パラメータ | 説明 |
|---|---|
| モデル | SU17-L |
| 電池のタイプ | 高圧リチウムポリマー電池 |
| 定格電圧 | 26.4V (最大)、21V (最小) |
| 保存電圧 | 22.8V(標準) |
| 定格容量 | 6000mAh |
| 重さ | 680グラム |
| 寸法 | 長さ: 85.2 mm、幅: 86。5mm、高さ:135mm |
リモートコントローラー
| パラメータ | 説明 |
|---|---|
| モデル | QE-2 |
| チャンネル | 8 |
| 送信電力 | 18~20dBm |
| 重さ | 294.1グラム |
ジンバル
| パラメータ | 説明 |
|---|---|
| 制御可能な角度 | -90°~30°(傾斜軸) |
| ストリーミングプロトコル | RTSP (標準) |
| エンコード形式 | 264 形式 |
| 解決 | 1080P @ 25fps |
| 対角視野角(D) | 120° |
| 垂直視野角(V) | 54° |
| 水平視野角(H) | 95° |
画像伝送
| パラメータ | 説明 |
|---|---|
| 動作周波数 | 2.4GHz |
| 送信電力 | 18dBm |
| 通信範囲 | 3km(干渉なし、障害なし) |
| 画像範囲 | 1km(干渉が最小限、障害物なし) |
| 最大帯域幅 | 40Mbps |
4重深度カメラ
| パラメータ | 説明 |
|---|---|
| ビジョンアクセラレータ | インテル Movidius マイリアド X VPU |
| 最大解像度 | 1296x816 |
| 最大フレームレート | 1280x800 @ 120fps |
| シャッタータイプ | グローバルシャッター |
| エンコード形式 | 8/10ビットシングルストリーム |
| 視野角 | 対角視野角 150°、水平視野角 127.4°、垂直視野角 79.7° |
| センサーの数 | 4 (フロント 2 + リア 2) |
| 国際ミュー | BMI270 |
GNSS
| パラメータ | 説明 |
|---|---|
| 水平精度 | 1.5 m CEP(SBAS付き) |
| 速度精度 | 0.05メートル/秒 |
| 動作モード | GPS + GLONASS + BDS + ガリレオ + SBAS + QZSS |
充電器
| パラメータ | 説明 |
|---|---|
| モデル | LK150-2640500 |
| AC入力電圧 | 100V~240V |
| DC入力電圧 | 26.4V |
| 重さ | 460グラム |
| 充電電流 | 5A |
3Dライダー
| パラメータ | 説明 |
|---|---|
| モデル | ミッド360 |
| レーザー波長 | 905 nm |
| 測定範囲 | 40 m @ 10% 反射率 |
| 視野角 | 水平360°、垂直-7°~52° |
| 最小範囲 | 0.1メートル |
| ポイント頻度 | 10 Hz (標準) |
| ポイント出力 | 200,000ポイント/秒 |
| データインターフェース | 100 BASE-TX イーサネット |
| データ同期 | IEEE 1588-2008 (PTP v2)、GPS |
| 内蔵IMU | ICM40609 |
| 電源電圧 | 7〜27V |
| 寸法 | 65mm(幅)×65mm(奥行き)×60mm(高さ) |
| 重さ | 115グラム |
| 動作温度 | -20℃~55℃ |
ソフトウェアパラメータ
オンボードコンピューター
| パラメータ | 説明 |
|---|---|
| モデル | インテル Core i5-8365U |
| システム | ウブントゥ 20.04 |
| ユーザー名 | アモフ |
| パスワード | アモフ |
| ロス | ノエティック |
| オープンCV | 4.7.0 |
| 視覚位置測定システム | BSA_SLAM V1 |
プロメテウスソフトウェア
| パラメータ | 説明 |
|---|---|
| バージョン | バージョン2.0 |
| PrometheusGroundStation システム | v1.24.11.27 (Wiki リリース記録に基づく最終バージョン) |
詳細
SU17 研究版
業界レベルの品質を誇る研究用ドローン
- オプションの3D LiDAR: マッピング、位置決め、ナビゲーション障害物回避を可能にします。
- プロメテウス自律ドローンソフトウェア: ドローンの制御を素早く習得するためのデモが豊富にあります。
- 業界レベルの飛行プラットフォーム: 安定性とオープン性を備え、研究用ドローンのパフォーマンスに新たな基準を確立します。

主な特徴
SU17研究 ドローン開発プラットフォーム (SU17と呼称)は、フライトコントローラー、オンボードコンピューター、クアッドカメラSLAMモジュール、クラウドカメラ、画像伝送モジュールを組み込んだ統合設計を採用し、高度な統合により、ハードウェアの安定性と信頼性が大幅に向上しています。Prometheus自律型ドローンソフトウェアを搭載したSU17は、さまざまな飛行制御シナリオでのターゲット認識、追跡、経路計画などの機能をサポートしています。
オプションで MID-360 3D LiDAR を統合し、FAST-LIO アルゴリズムと組み合わせて 3D LiDAR SLAM を実現し、正確な環境検知と位置情報を提供します。EGO-Swarm パス プランニング アルゴリズムと組み合わせることで、複雑な環境でも効率的なリアルタイム 3D マッピングと障害物回避が可能になります。




Prometheus V2 ソフトウェア システム
開発プラットフォームは、ROS および Prometheus オープンソース フレームワーク上に構築されており、効率的な再プログラミングのための豊富な機能と広範な二次開発 API を提供します。位置情報、飛行モード、バッテリー状態、IMU データ、その他のドローン状態およびセンサー データ インターフェイスへのアクセスに加え、位置、速度、加速度、姿勢の制御インターフェイスも提供します。
また、関連APIの使用例も掲載しています。さらに、飛行操作時の安全確認機能(アンチクラッシュ)を搭載しており、異常事態発生時に自動降下が可能で、墜落リスクを低減し、より安全な開発を実現します。

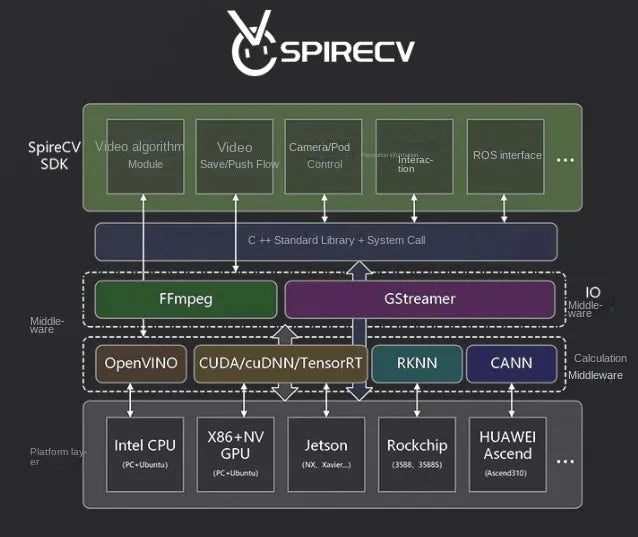
SpireCV ビジョンライブラリ
SpireCV Vision Library は、インテリジェント UAV システム向けに特別に設計されたリアルタイム画像処理 SDK です。ジンバルとカメラの制御、ビデオの保存とストリーミング、ターゲットの検出、認識、追跡などの機能を提供します。
この SDK は、インテリジェント UAV システムの開発者に、高いパフォーマンス、信頼性、合理化されたインターフェイスを提供することを目的としています。機能豊富なビジュアル処理ソリューションにより、開発者はさまざまな複雑なビジョンベースのアプリケーションを効率的に実装できます。
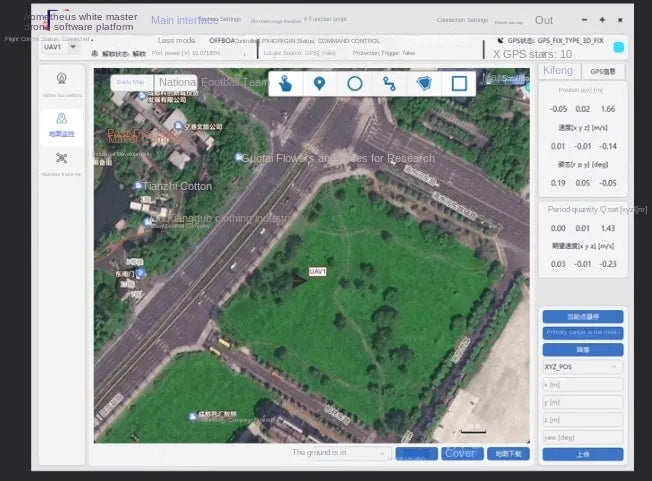
プロメテウス地上局
Prometheus Ground Station は、Prometheus システムに基づいて開発され、Qt テクノロジーを使用して構築された人間とドローンのインタラクション インターフェイスです。Prometheus システムの機能を迅速に複製し、ドローンの状態と制御データをリアルタイムで監視し、3D で視覚化することができます。
地上ステーションを通じて、ユーザーはワンクリック離陸、現在の位置でのホバリング、着陸、位置制御などのコマンドを実行できます。さらに、システムは、ユーザー定義のスクリプトを開始したり、カスタムメッセージを送信したりするためのカスタム機能ボタンをサポートしており、ユーザー操作の利便性、効率性、拡張性が大幅に向上しています。
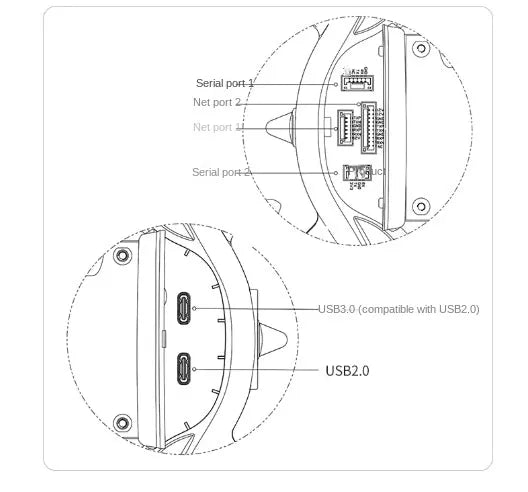
強力な拡張
ハードウェア拡張ポート
-
シリアルポート1
-
シリアルポート2
-
ネットワークポート 1
-
ネットワークポート2
-
USBポート:
- USB 3.0 (USB 2.0と互換性あり)
- USB2.0 について
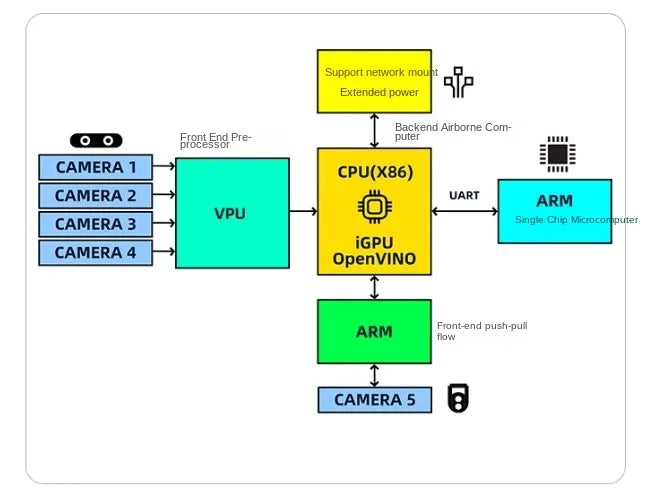
ハードウェアフレームワーク
この画像は SU17 ドローンのハードウェア アーキテクチャを示しており、高度なデータ処理とシステム制御のためのさまざまなコンポーネントの統合が強調されています。
-
カメラ(カメラ1~4):
接続された VPU(ビジョンプロセッシングユニット) フロントエンドの前処理用。 -
仮想化:
複数のカメラからの映像データを処理し、処理ユニットに転送します。 -
CPU (X86) と iGPUとOpenVINO:
バックエンド処理の主要な計算ユニットとして機能し、ネットワーク接続された拡張機能をサポートして計算能力を強化します。 -
ARM シングルチップ マイクロコントローラ:
追加の制御機能のために、UART インターフェイスを介して CPU と対話します。 -
フロントエンドパイプラインとカメラ 5:
専用の ARM プロセッサによって管理され、さらにデータが合理化されます。
このフレームワークは複数の処理ユニットを統合し、リアルタイムの画像分析、高度な計算タスク、ハードウェア コンポーネント間のシームレスな通信をサポートします。これにより、研究開発アプリケーションにおける複雑な操作を効率的に処理できます。
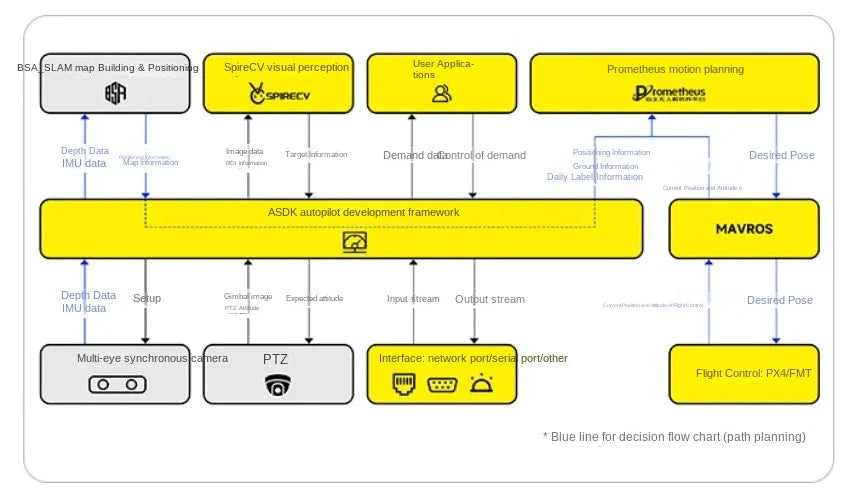
ソフトウェアフレームワーク
この図は、SU17 ドローンのソフトウェア アーキテクチャを示しており、自律機能のためのさまざまなシステムの統合を強調しています。
-
BSA_SLAM (マッピングとローカリゼーション):
- 空間マッピングと位置データを提供します。
- 深度と IMU センサーの入力を統合し、正確な環境認識を実現します。
-
SpireCV ビジョン パーセプション:
- オブジェクトの検出、ROI 情報、ターゲットの追跡などの視覚データを処理します。
-
ユーザーアプリケーション:
- データの視覚化やコマンド入力などのユーザー主導のタスク用のインターフェース。
-
プロメテウスモーションプランニング:
- 位置、速度、ターゲット データを使用して軌道計画を処理します。
-
ASDK自動運転フレームワーク:
- 中央処理層として機能し、センサー、カメラ、クラウド モジュール、外部インターフェイス間のデータ フローを管理します。
- 複数の入出力チャネル (ネットワーク ポート、シリアル ポートなど) をサポートします。
-
マヴロス:
- 飛行状態と位置制御のために飛行制御システム (PX4/FMT) と通信します。
-
クラウドモジュールとマルチシンクカメラ:
- 高度な処理のためにクラウドベースのデータを統合します。
- 視覚入力を同期して高精度な操作を実現します。
ブルーライン: 軌道計画のための意思決定経路を表します。
このアーキテクチャは、モジュール式の拡張可能な設計を示しており、堅牢なドローン操作のためにさまざまなハードウェアおよびソフトウェア コンポーネント間のシームレスな通信を可能にします。
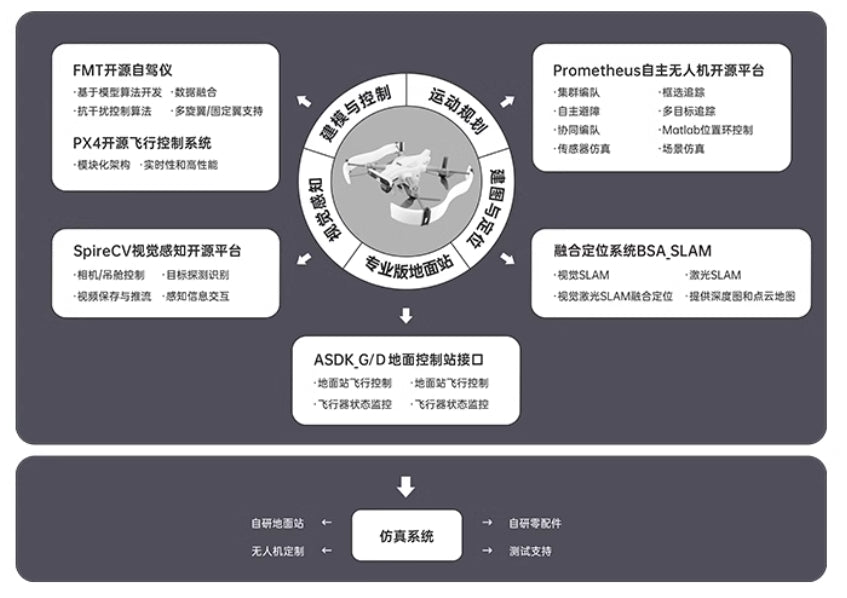
インテリジェントなオープン性: 統合型 UAV システム ソリューション
この図は、さまざまなコンポーネント間のモジュール性と統合を強調した、ドローン システムの包括的かつオープンなアーキテクチャを示しています。
-
コアコンポーネント:
- FMTオープンソースオートパイロット: モジュール開発に基づく信頼性の高い飛行制御を提供し、多様な環境とデータ統合をサポートします。
- PX4 フライトコントロールシステム: 安定性を確保し、高度なモジュールカスタマイズをサポートします。
- SpireCV 視覚認識プラットフォーム: 物体検出、追跡、リアルタイムビデオストリーミングなどの画像処理に重点を置いています。
-
主要なフレームワーク:
- プロメテウス自律型UAVプラットフォーム: マルチドローン制御、動作計画、共同ナビゲーション、現実世界のシミュレーションが含まれます。
- BSA_SLAM システム: ビジョンベースの SLAM と LiDAR ベースの SLAM を組み合わせて、正確な位置決めとマッピングを実現します。
- ASDK G/D地上局制御インターフェース: 地上局と UAV 間のシームレスな通信を可能にし、監視とリアルタイム調整を実現します。
-
ワークフロー統合:
- 動作計画、環境マッピング、自律ナビゲーションなどのプロセスを強調表示します。
- 軌道制御、障害物回避、リアルタイムのデータ管理のための専門的な地上局との統合。
-
シミュレーションサポート:
- 自律ミッションテスト、UAV 制御、コンポーネント検証用のシミュレーション システムが含まれています。
このシステムは、さまざまなシナリオでの研究、アプリケーション、テストのためのスケーラブルな機能を備えた、自律型 UAV 開発のための最先端のソリューションを実証します。
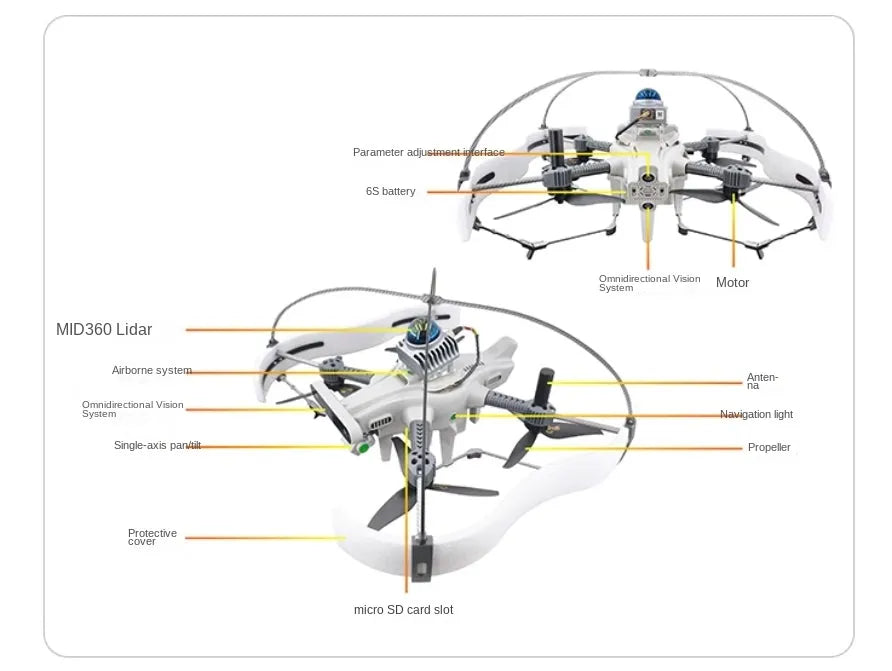
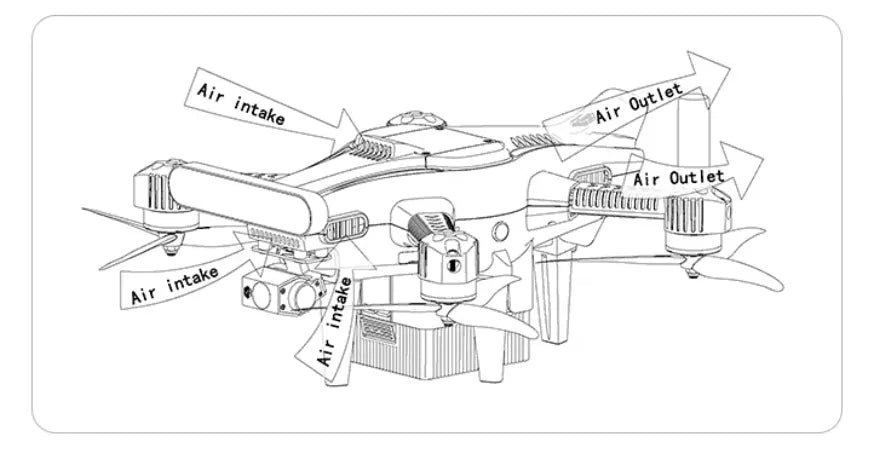
SU17研究用ドローンの構造部品を改良し、その安定性と先進的なデザインを強調しました。主な特徴は次のとおりです。 MID360 ライダー 正確なマッピングのために、 全方向視覚システム 包括的な環境認識のために、 単軸ジンバル 安定した画像と堅牢な 6Sバッテリー パワーを拡張するために。その他の重要なコンポーネントには、 プロペラシステム、 アンテナ、 航海灯、そして マイクロSDカードスロット データストレージ用。最先端のハードウェアを統合した設計により、さまざまな研究アプリケーションで信頼性と高性能が確保されます。
Related Collections