






Ti5 ロボット CRA-RI100-142-PRO-XX 一体型ジョイント アクチュエーター、1 kW、24 ~ 48 V、最大 169 N·m、IP65、CAN/EtherCAT、51 ~ 161:1、オプションのブレーキ
Ti5 ロボット CRA-RI100-142-PRO-XX 一体型ジョイント アクチュエーター、1 kW、24 ~ 48 V、最大 169 N·m、IP65、CAN/EtherCAT、51 ~ 161:1、オプションのブレーキ
Ti5 Robot
受取状況を読み込めませんでした
概要
その Ti5ロボット CRA-RI100-142-PRO-XX 永久磁石サーボモータ、精密減速機、エンコーダ、密閉ハウジングを組み合わせたコンパクトな一体型関節アクチュエータです。PROシリーズの一つで、 ヒューマノイド、外骨格、協働ロボット、AGV、産業用機械、フィーチャリング 高トルク密度、低騒音、IP65保護コントローラーインターフェースは選択可能(CANまたはEtherCAT)、フィードバックは シングルまたはデュアルエンコーダ、そして ブレーキを握る オプションとしてご利用いただけます。 32 mm中空シャフト ジョイントを通るケーブルや空気圧の配線を簡素化します。
主な特徴
-
最大169 N·mの定格トルク (比率依存)スムーズで低コギング出力
-
密閉型IP65 防塵・防水操作のためのハウジング
-
24~48 V DC、1 kW 高効率クラスPMSM
-
CANまたはEtherCAT フィールドバス; シングル/デュアルインクリメンタルエンコーダ (17ビット)
-
オプションの保持ブレーキ (-B)安全な位置決めと電源オフ保持用
-
中空軸出力(Ø32 mm); スルーケーブル対応
-
長寿 &高い信頼性; 低ノイズ、高精度
-
配線済みハーネス(5メートル)で素早く統合
仕様
電気 & 一般
-
モデル: CRA-RI100-142-PRO-XX(-B = ブレーキ付き)
-
モータータイプ: 永久磁石同期
-
定格出力: 1000ワット
-
供給電圧: 24~48V DC
-
定格電流: 15.8 A | 最大連続電流: 16.9 A
-
位相抵抗: 0.12Ω | インダクタンス: 0.3 mH
-
極ペア: 8 | トルク定数: 0.175 N·m/A
-
エンコーダー: 増分、 17ビット、 シングルまたはデュアル
-
バス: できる (EtherCAT選択可能)
-
保護: IP65
-
回転範囲: 60°
-
スルーホール: Ø32 mm
-
動作周囲温度: まで 60℃
-
ケーブル長さ: 5メートル
機械的なエンベロープ
-
ブレーキなし: 長さ 95.7 ± 0.5 mm、 質量 3.8 kg、 ローター慣性 3601 g·cm²
-
ブレーキ付き(-B): 長さ 115.7 ± 0.5 mm、 質量 4.5 kg、 ローター慣性 4237 g·cm²
注:型式名の「100-142」は、公称外径クラスと軸長さシリーズを表します。
減速比による性能 — ブレーキなし
| 比率 | 始動/停止ピークトルク(N·m) | 最大許容平均負荷トルク(N·m) | 2000 rpm/比での定格トルク(N·m) | ピーク出力速度(rpm) | 定格回転数(1/2)定格トルク(rpm) | バックラッシュ(秒角) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
減速比による性能 — ブレーキ付き(-B)
トルクと速度の定格はブレーキなしバージョンと同じですが、寸法/重量/慣性は異なります (上記を参照)。
| 比率 | 始動/停止ピークトルク(N·m) | 最大許容平均負荷トルク(N·m) | 2000 rpm/比での定格トルク(N·m) | ピーク出力速度(rpm) | 定格回転数(1/2)定格トルク(rpm) | バックラッシュ(秒角) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
アプリケーション
-
ヒューマノイドロボット: 密閉された高トルク作動を必要とする肩/股関節/膝関節/足首関節
-
協働ロボット(コボット): エンコーダの冗長性によるスムーズで低ノイズな動作
-
外骨格 &リハビリ機器: コンパクトで高トルクのジョイント 電源オフ保持(-B)
-
ジンバル & パンチルトユニット: 低バックラッシュで正確な位置決め
-
AGV &特殊機械: 頑丈な IP65 ほこりや湿気の多い場所のジョイント
-
自動車 & 海洋メカニズム: 補助動作システム用の密閉型アクチュエーション
詳細

CRA-RI100-142-PRO-XXアクチュエータ仕様:51~161ギア比、267~459 N.m ピークトルク、1000W モーター、24-48V 電源、CAN バス、重量 3.8kg、慣性 3601 g·cm²、エンコーダ解像度 17 RPM。
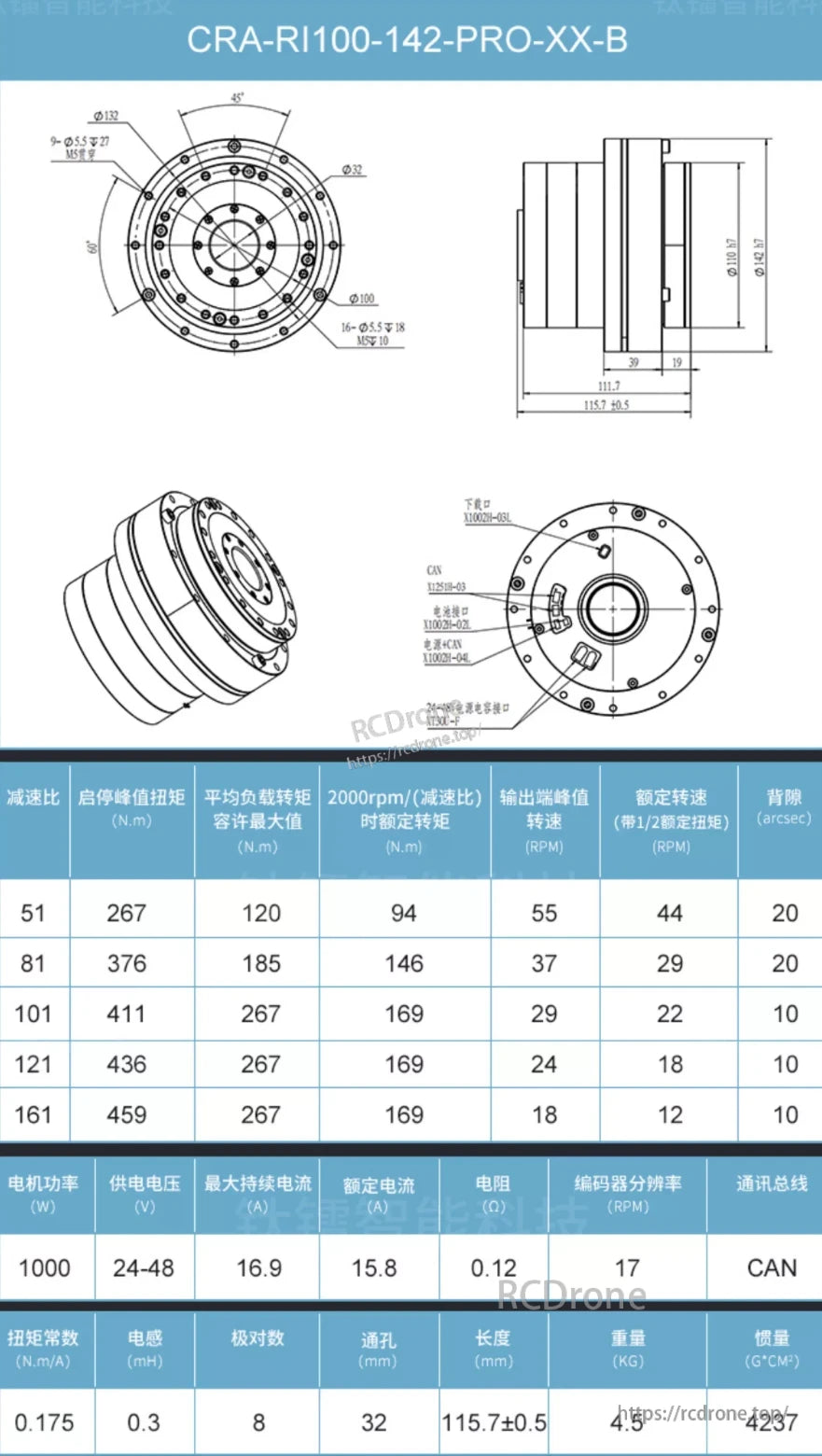
CRA-RI100-142-PRO-XX-B アクチュエータの仕様: 1000W モーター、24 ~ 48V、15.8A 定格電流、17 RPM エンコーダ解像度、CAN バス、重量 4.5kg、長さ 115.7mm、トルクおよび速度データを備えた複数のギア比。
Related Collections






