






Ti5 ロボット CRA-RI40-52-PRO モータージョイントモジュール モーター 24-48V 90W 51/101 比率 16ビットエンコーダ
Ti5 ロボット CRA-RI40-52-PRO モータージョイントモジュール モーター 24-48V 90W 51/101 比率 16ビットエンコーダ
Ti5 ROBOT
通常価格
$1,216.00 USD
通常価格
セール価格
$1,216.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
Ti5 ROBOT CRA-RI40-52-PRO モーターはロボティクスジョイント用の軽量ジョイントモジュールモーターです。強調されたテキストには、「軽量ジョイントモジュール」、「コアハードウェアのブレークスルーキー」、「軽量」、「小型で強力な性能」が含まれています。
主な特徴
軽量 / 小型
- より強力な使いやすさを持つ超軽量設計。
- 重量が1/3以上削減されました。
- 動作エネルギー消費を大幅に削減します。
性能
- 産業用グレードの性能基準。
- トルク密度は同類製品の2倍です。
- 自動車グレード、静電気防止、振動防止。
モジュール化
- 6つのモジュールが有機的に統合されています。
- 3つのシリーズが異なるシナリオの顧客に包括的に適応します。
- 生産の難易度を大幅に低減し、生産効率を向上させます。
構造(展開図ラベル)
- モーター背面カバー
- 制御基板
- エンコーダ
- ステータハウジング
- モーター回転子
- モーターステーター
- ハーモニックリデューサー
- フレックススプラインカバー
量産 / プラットフォームの声明
- 業界をリードする量産の利点。
- すべての基盤となるハードウェアを制御でき、ローカライズ率は100%に達することができます。
- ロボット開発のための完全なソフトウェアツールチェーンがあり、研究開発を加速するのに役立ちます。
- Ti5ロボット迅速開発プラットフォームは、ハードウェアとソフトウェアを組み合わせており、将来の利用可能性について言及されたオープンソースSDKがあります。
トルク密度比較 (Nm/kg)
- 250+: Ti5ロボット次世代
- 254: アメリカのブランド
- 192: Ti5ロボット量産モデル
- 80.4: 中国のブランド
- 53.5: カナダのブランド
- 33.8: 韓国のブランド
キャプションテキスト: “主流のジョイント製品のトルク密度の比較 (Nm/kg)”。
選択ガイダンス、ドキュメントに関する質問、または統合サポートについては、https://rcdrone.top/に連絡するか、[email protected]にメールしてください。.
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
仕様
| パラメータ | 値 |
|---|---|
| モーターモデル | CRA-RI40-52-PRO-XX / CRA-RI40-52-PRO-XX-B |
| 減速比 | 51 / 101 |
| 始動停止ピークトルク | 8.3 / 11 N.m |
| 最大許容平均負荷トルク | 5.5 / 8.9 N.m |
| 2000 Rpm/(減速比) この速度での定格トルク | 3.5 / 5 N·m |
| 出力端ピーク回転速度 | 118 / 59 RPM |
| 定格速度 | 80 / 40 RPM |
| モーター出力 | 90 W |
| 供給電圧 | 24-48 V |
| 最大連続電流 | 3 A |
| 定格電流 | 2 A |
| エンコーダ解像度 | 16 ビット |
| バッククリアランス | 40 / 30 アーク秒 |
| トルク定数 | 0.05 N·m/A |
| 穴 | 12 mm |
| 長さ: ブレーキなし / ブレーキあり | 62 ±0.5 mm / 82 ±0.5 mm |
| 重量: ブレーキなし / ブレーキあり | 0.32 kg / 0.42 kg |
| 慣性: ブレーキなし / ブレーキあり | 73 g·cm² / 116.2 g·cm² |
マニュアル
詳細

低重量と高トルク密度が最も重要なコンパクトロボティクスジョイント用に設計されています。

モジュラー内部レイアウトは、モーター, リデューサー、制御基板、およびエンコーダーを1つの統合ジョイントモジュールに組み合わせています。

ロボット統合を加速することを目的とした開発ツールチェーンを備えたスケーラブルな生産プラットフォームに基づいています。

コンポーネントレベルの内訳は、設計およびメンテナンス計画のためにジョイントモジュールに含まれるものを確認するのに役立ちます。
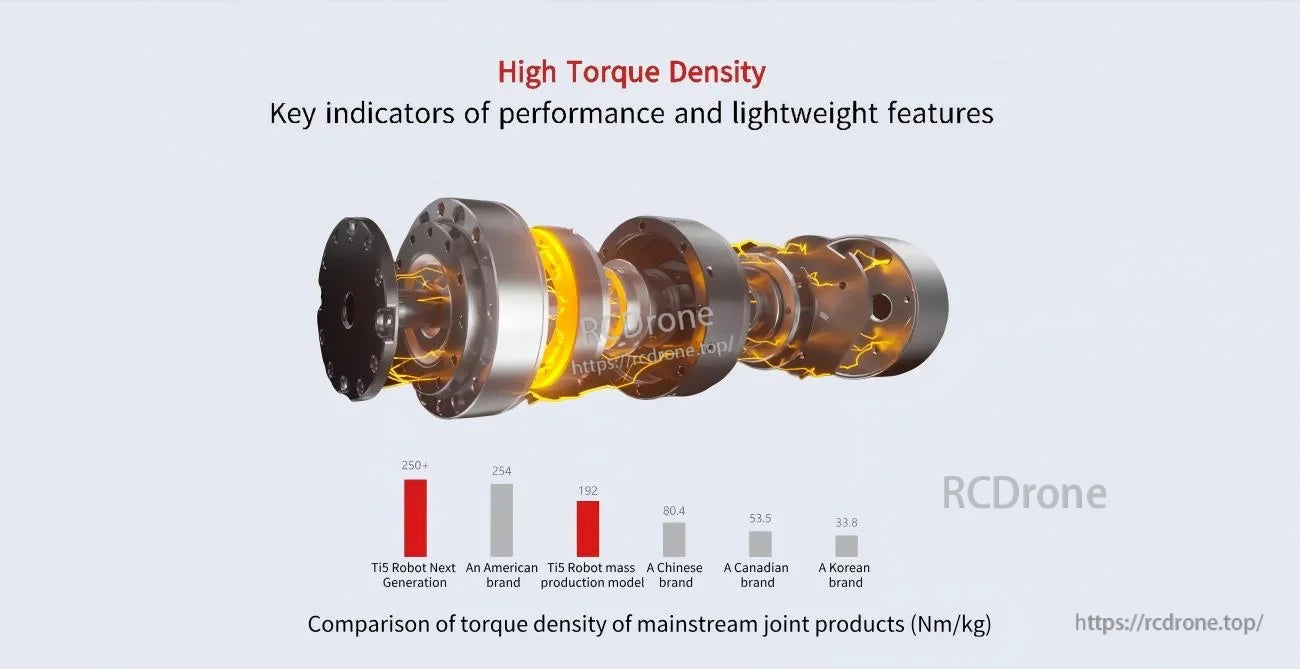
トルク密度(Nm/kg)の比較は、他の主流のジョイント製品に対する迅速なコンテキストを提供します。
Related Collections






