




Vizum インテリジェント Vihero デクストラスロボットハンド、16自由度 5指ヒト型ハンド、24V CAN FD、233x89x45 mm、780g
Vizum インテリジェント Vihero デクストラスロボットハンド、16自由度 5指ヒト型ハンド、24V CAN FD、233x89x45 mm、780g
Vizum
通常価格
$6,999.00 USD
通常価格
セール価格
$6,999.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
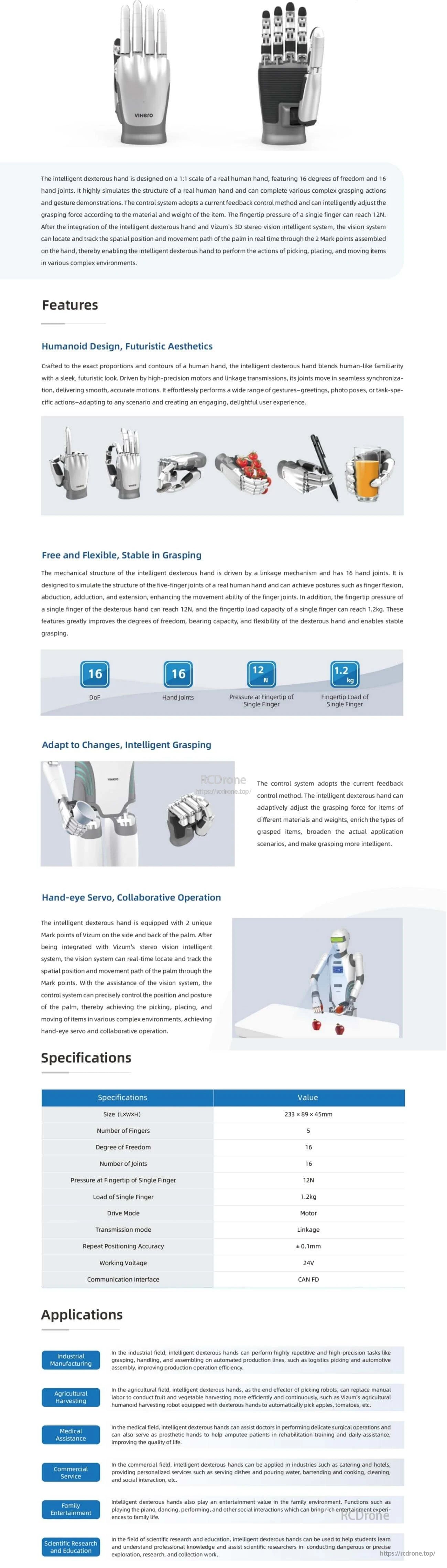
VizumインテリジェントVihero巧妙ロボットハンドは、16自由度と16関節を持つ5本指の人間型エンドエフェクターであり、正確な把持と操作のために人間の手の運動学をシミュレートするように設計されています。モーター駆動のリンク伝達アーキテクチャと電流フィードバック制御により、異なるアイテムや材料に対して適応的なグリップ力を実現します。このハンドは、手のひらにマークポイントを介してVizumステレオビジョンとの統合をサポートし、システムが複雑な環境での協調的なピック、プレース、ムーブアクションのために手のひらの位置と向きを特定し追跡できるようにします。
主な特徴
- 人間のような器用さを持つ16自由度と16関節の5本指の人間型デザイン。
- リンク伝達による同期的で安定した動作のためのモータードライブ。
- 異なる物体に対して指先の力を適応的に調整するための電流フィードバックグリップ制御。
- 単一の指の指先圧力は最大12 N; 単一指の耐荷重は最大1.2 kg。
- 精密な操作のための繰り返し位置決め精度は±0.1 mm。
- システム統合のためのCAN FD通信を備えた24 V動作電圧。
- 手と目の協力をサポートし、手のひらマークポイントを介してVizumステレオビジョンと統合されます。
販売前または技術サポートについては、[email protected] orに連絡するか、https://rcdrone.top/を訪問してください。
仕様
| サイズ (L x W x H) | 233 mm x 89 mm x 45 mm |
| 重量 | 780 g |
| 指の数 | 5 |
| 自由度 | 16 |
| 関節の数 | 16 |
| 単一指の指先の圧力 | 12 N |
| 単一指の荷重 | 1.2 kg |
| 駆動モード | モーター |
| 伝達モード | 連動 |
| 繰り返し位置決め精度 | +/- 0.1 mm |
| 動作電圧 | 24 V |
| 通信インターフェース | CAN FD |
アプリケーション
- 産業製造:自動化ラインでの把握、取り扱い、組み立てなどの反復的な高精度作業。
- 農業収穫:作物を扱うためのピッキングロボットのエンドエフェクタとして。
- 商業サービス:ロボットプラットフォームを使用したケータリング、ホスピタリティ、清掃、社会的相互作用のタスク。
- 家族向けエンターテイメント:遊び、パフォーマンス、インタラクティブなデモンストレーション。
- 科学研究と教育:ロボティクス研究、教育、巧妙な操作の研究。
マニュアル
- Vihero_Dexterous_Hand_Manual.pdf
- Dexterous_Hand_Brochure.pdf
- INTELLIGENT_DEXTEROUS_HAND_L_stp.zip
- INTELLIGENT_DEXTEROUS_HAND_R_stp.zip
詳細
Vizum Vihero dexterous robot handは16自由度を持ち、人間の手を模倣し、把持力をインテリジェントに調整し、正確な操作のためにステレオビジョンを統合しています。産業、医療、農業、商業、エンターテインメント、教育の用途に適しています。




