








WitMotion HWT601-AGV-485 IMU RS485 Modbus、IP67、200Hz – 6軸加速度・ジャイロ・傾斜計、ROS/Matlab対応
WitMotion HWT601-AGV-485 IMU RS485 Modbus、IP67、200Hz – 6軸加速度・ジャイロ・傾斜計、ROS/Matlab対応
WitMotion
受取状況を読み込めませんでした
概要
WitMotion HWT601-AGV-485は、AGVロボット、ドローン、および自律プラットフォーム向けに設計された6軸姿勢/方位センサーです。これは、3軸加速度 + 3軸角速度を組み合わせ、最大200 Hzで3軸角度&およびクォータニオンをRS485 (Modbus)を介して出力します。このモジュールは、カルマン動的フィルタリング、高精度ターンテーブルキャリブレーション、自動/手動バイアス取得、電源オフ時の方位保存用バックアップ電源、およびIP67防水/防塵ハウジングを特徴としています。また、同期した姿勢測定のためにマルチレベルカスケード(最大32ユニット)をサポートしています。
主な特徴
-
高精度角度: XY精度 0.1°; Z精度 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485)。
-
安定したジャイロスコープバイアス: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
広範な入力 9–36 V, 動作電流 ≈ 8 mA @12 V.
-
RS485 Modbus, ボーレート 4,800–230,400 bps.
-
サンプリング: リクエスト–レスポンス読み取り最大200 Hz.
-
アルゴリズム: カルマンフィルターフュージョンおよび専用AGVヘディングアルゴリズム.
-
ソフトウェア: ライブダッシュボード、カーブプロット、3Dビジュアライゼーション(車/球/立方体/平面)、設定(バイアス、角度参照、加速度キャリブレーション、スケールファクター)、データ記録&および直接保存、およびMatlabインポート。
-
開発者向け: ROS、Linux、C/C#、Pythonのサンプルプログラムとコードサポートがあります。
-
環境: IP67、-40~80 °C(-40~85 °Cのテーブルバリアントが表示されています)。
-
カスケード: RS485で最大32センサーによる同時姿勢測定が可能です。
設置ガイドライン
-
センサーをしっかりとした平坦で安定した面に取り付けてください。不均一な基盤は角度誤差を引き起こします(図1–2を参照)。
-
センサー軸を測定軸に平行に保ち、軸間角度を避けてください(図3–4を参照)。
-
このモデルは水平設置のみをサポートしています。
ソフトウェア &および可視化
-
強力なデータダッシュボード(角度、速度、加速度、磁気、四元数、ポート、温度、電圧など)。
-
設定パネル:ボーレート、デバイスアドレス、自動バイアス取得、Z軸リセット、加速度キャリブレーション、角度基準、手動正/負キャリブレーションおよびスケールファクター。
-
直感的な動作監視のための3Dモデルとリアルタイム曲線の動的更新。
-
生データビューと簡単な収集のためのファイル保存;Matlab分析インポートがサポートされています。
-
ROS IMU INSデモ:姿勢追跡の可視化と姿勢データ表示(ヨー/ロール/ピッチ、角速度、線形加速度)。
html
仕様
インターフェース &およびパフォーマンス
| アイテム | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| インターフェース / プロトコル | RS485 / Modbus | RS485 / Modbus |
| ボーレート | 4,800–230,400 bps | 4,800–230,400 bps |
| 出力データ | 3軸 加速度、角速度、角度、クォータニオン | 同じ |
| サンプリング周波数 | 最大200 Hz(リクエスト–レスポンス) | 最大200 Hz |
| XY角度精度 | 0.1° | 0。 1° |
| 角度精度 (360°回転誤差) | 0.1° | 0.15° |
| 加速度範囲 / 解像度 | ±4 g / 0.0001 g/LSB | 同じ |
| ジャイロ範囲 / 解像度 | ±250 °/s / 0.0122 (°/s)/LSB | 同じ |
| 角度範囲 / 解像度 | XZ: ±180°; Y: ±90° / 0.0059° | 同じ |
| ジャイロバイアス不安定性 (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| 温度係数 (XYZ) | 0.002°/°C | 0.002°/°C |
電気、機械 &および環境
-
供給電圧: 9–36 V; 動作電流: ≈ 8 mA (12 V)
-
寸法: 55 × 36.8 × 24 mm; ケーブル長: 1 m
-
保護: IP67
-
動作温度: -40~80 °C (テーブルバリアントはまた-40~85 °Cを示します)
-
取り付け: 水平取り付けのみ
-
カスケード: 最大32ユニット RS485上
適用分野
AGV/AMRおよびモバイルロボット、ドローン/UAV、無人物流車両、及び自律運転認識モジュール。
モデル名付け &および選択
-
HWT601-AGV-485 – より高いZ軸精度 (0.1°) と低いZバイアス不安定性 (2°/h)。
-
WT601-AGV-485 – 標準Z軸仕様 (0.15°, 5°/h)。
Zヘディングの精度が重要な場合は、HWT601を選択してください。
詳細

高精度6軸姿勢センサーで、3軸加速度、角速度、角度、クォータニオンを測定します。AGVヘディングアルゴリズム、IP67保護、カルマンフィルタリング、自動バイアス取得、PCソフトウェアサポートを特徴としています。
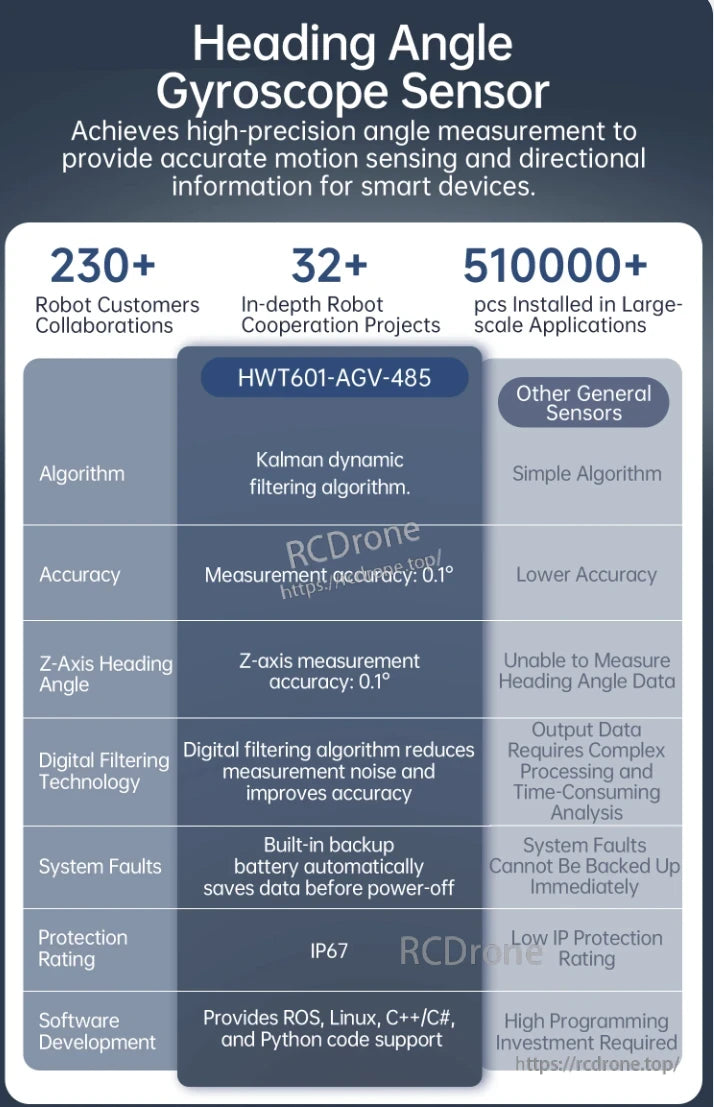
ヘディング角ジャイロセンサーHWT601-AGV-485は、カルマンフィルタリングによる高精度な角度測定を提供し、0.1°の精度、デジタルノイズ低減、IP67保護を備え、ROS、Linux、C++、Pythonをサポートしています。230以上のロボットコラボレーションと510,000以上のインストール実績があります。
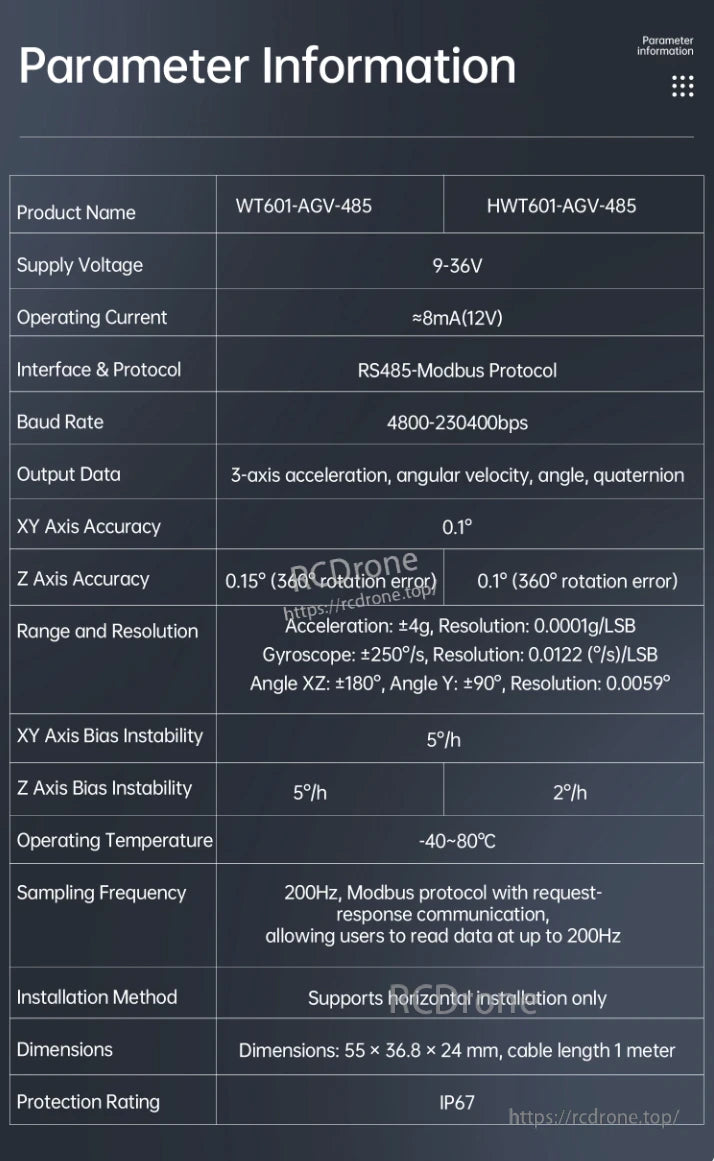
HWT601-AGV-485 IMUは、9-36Vの電源、RS485-Modbus、200Hzのサンプリング、±4gの加速度、±250°/sのジャイロスコープ、IP67等級、-40~80°Cの動作を提供します。正確で高解像度の3軸データを提供します。
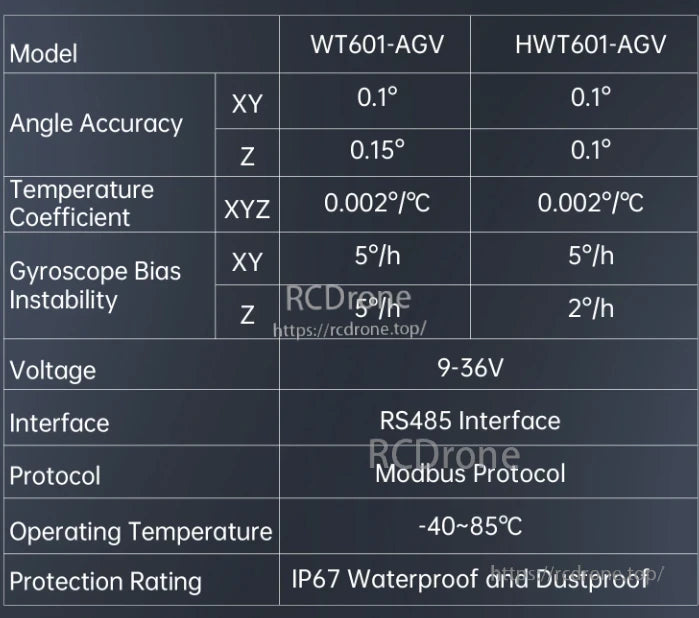
HWT601-AGV IMUは、XYおよびZ軸で0.1°の角度精度を提供し、XYZ全体で0.002°/°Cの温度係数を持っています。ジャイロスコープのバイアス不安定性は、XYで5°/h、Zで2°/hです。9–36Vで動作し、RS485を使用してModbusに対応し、-40から85°Cで機能します。IP67等級で、防水および防塵保護を提供します。WT601-AGVバリアントは、類似の仕様を持ちますが、Z軸の精度は0.15°、Z軸のバイアス不安定性は5°/hです。両モデルは、厳しい環境での信頼性の高い性能を保証します。
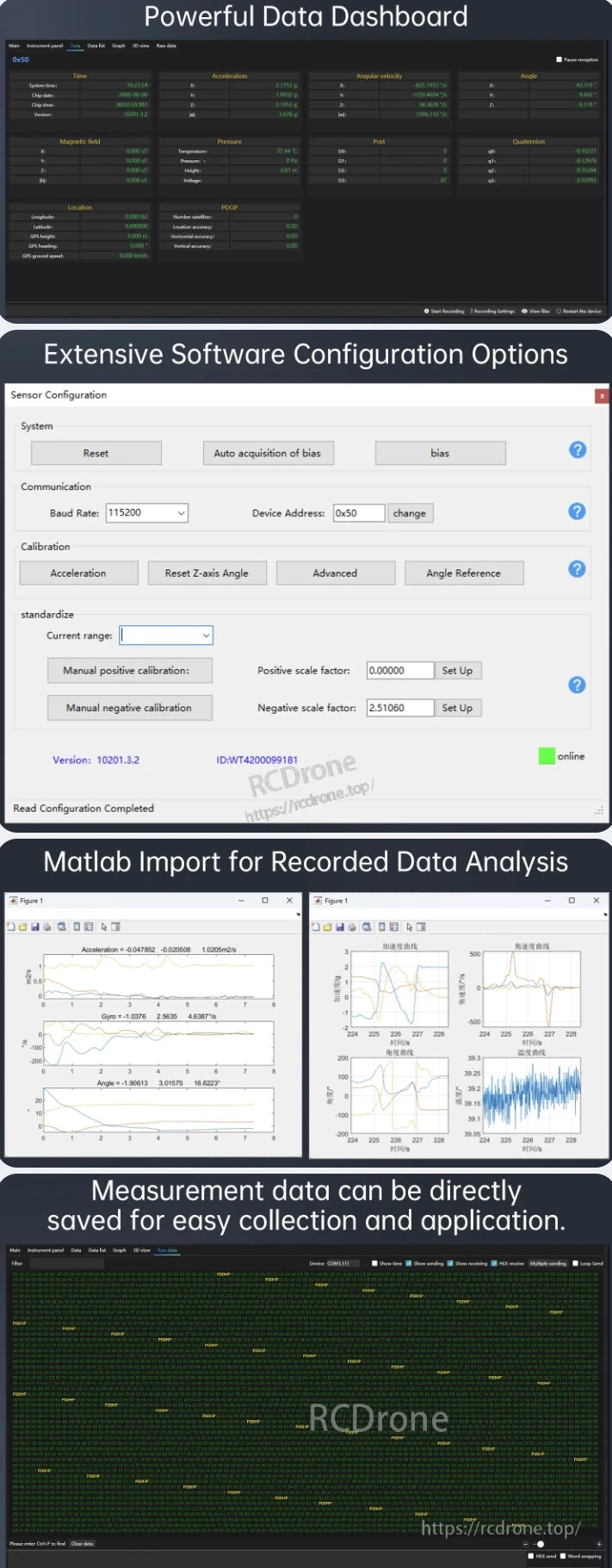
リアルタイムのセンサー読み取り、広範なソフトウェア設定、分析のためのMATLABインポート、簡単な収集と適用のための直接データ保存を備えた強力なデータダッシュボード。
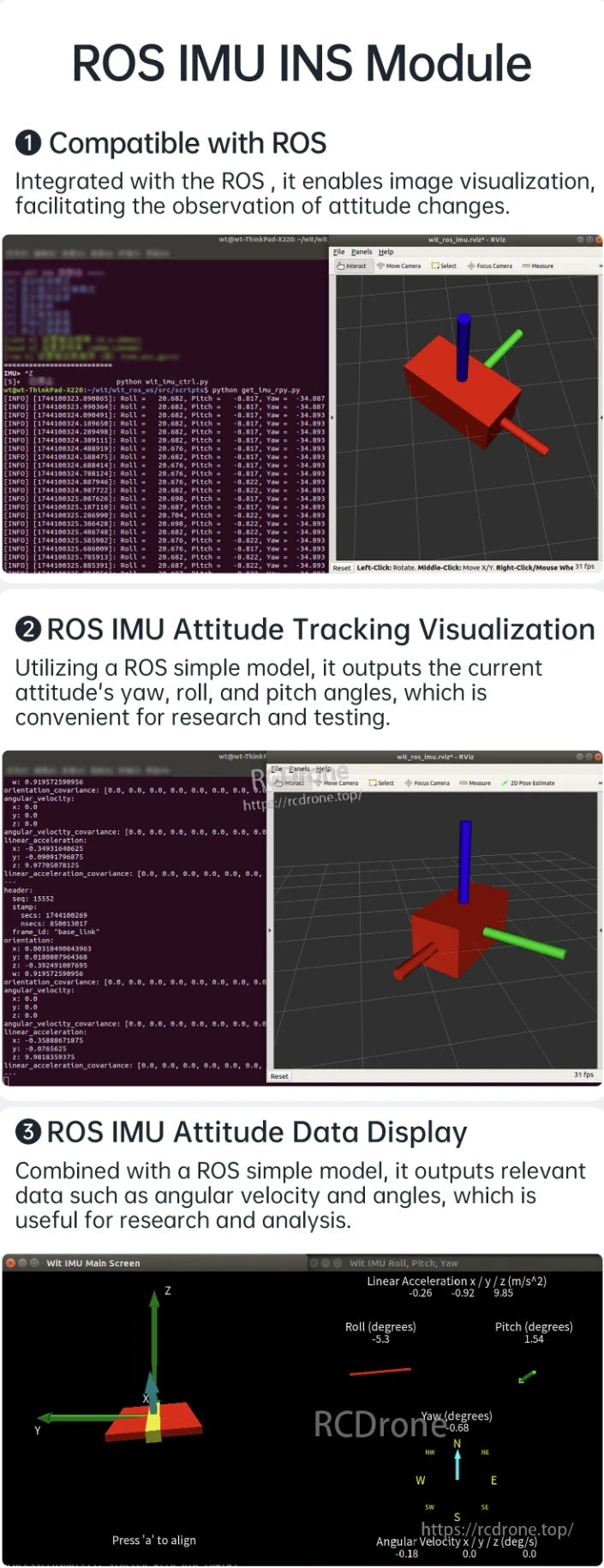
ROS IMU INSモジュールはROS互換性を提供し、姿勢追跡を視覚化し、研究と分析のためにリアルタイムのロール、ピッチ、ヨー、角速度、線形加速度を表示します。
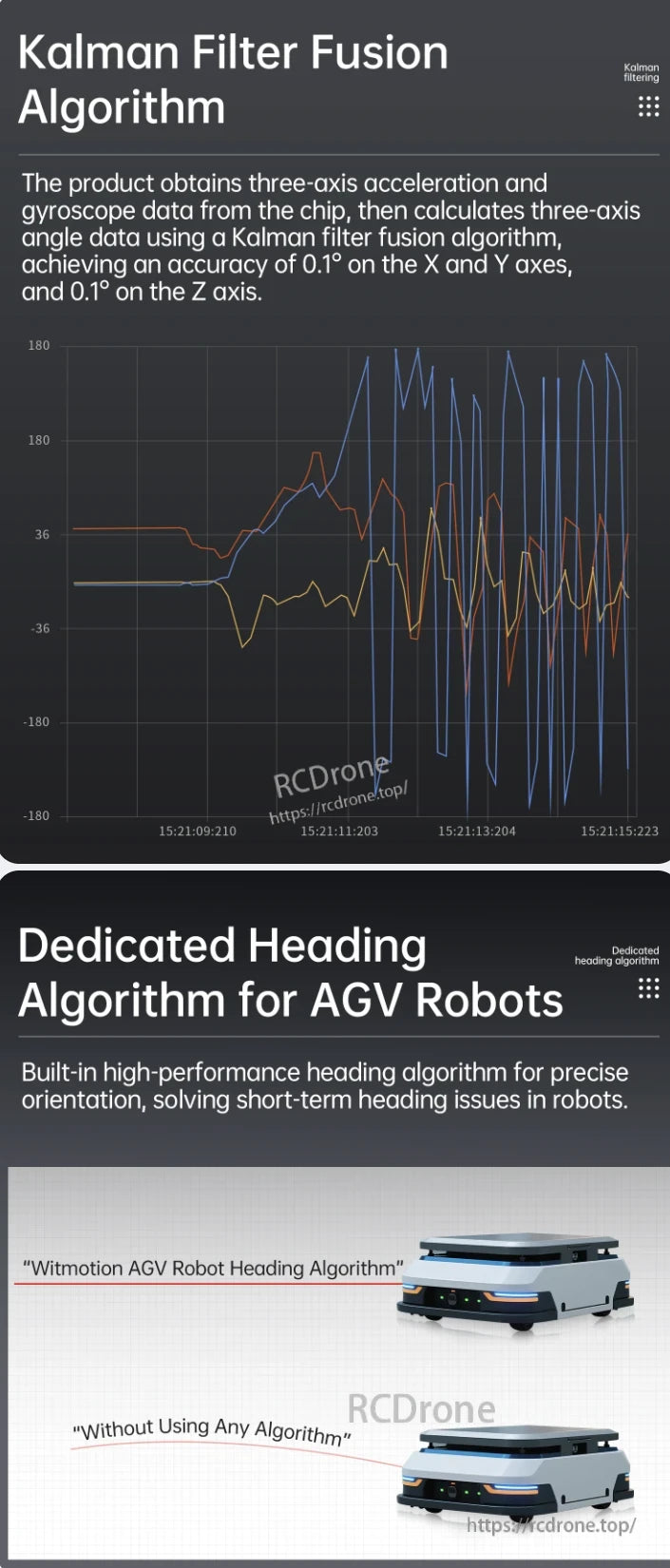
WitMotion HWT601 AGV IMUは、カルマンフィルターフュージョンを使用して0.1°の精度で正確な3軸角データを提供します。専用のヘディングアルゴリズムにより、安定したロボットの向きを確保し、そのようなアルゴリズムを持たないシステムと比較してパフォーマンスを大幅に向上させます。
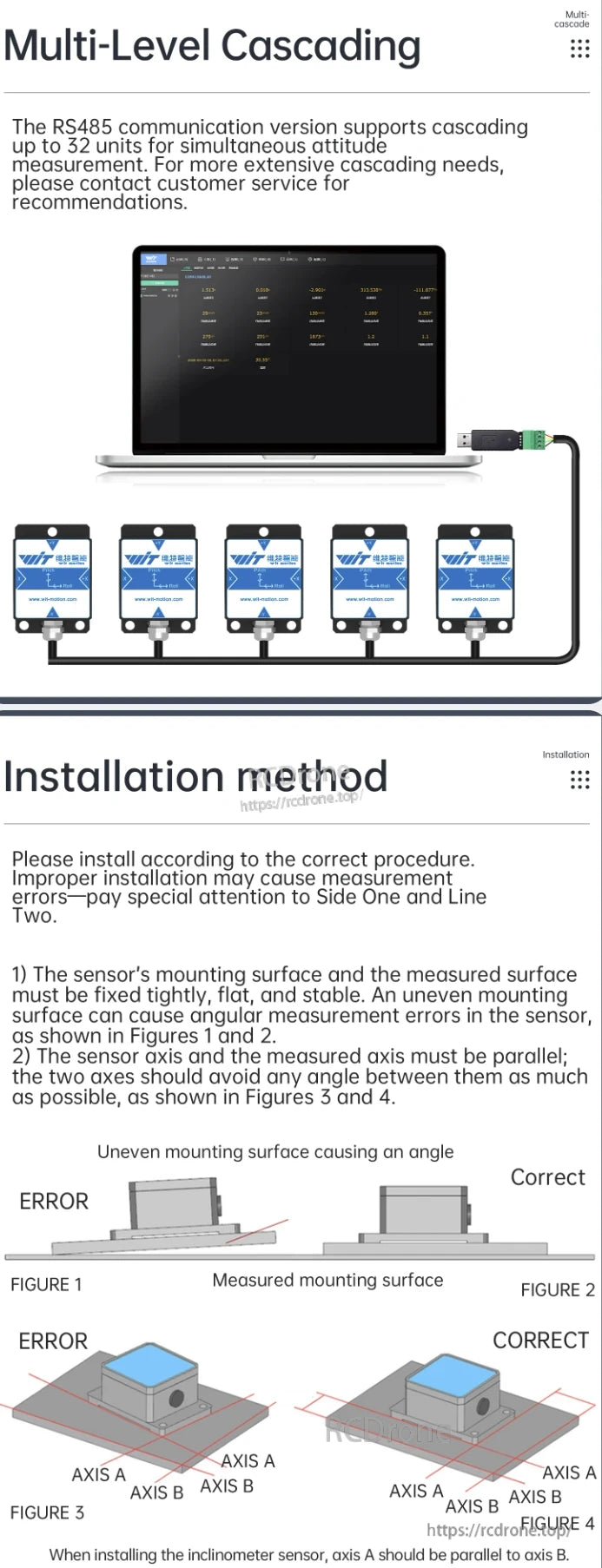
WitMotion HWT601 AGV IMUは、姿勢測定のためにRS485を介して最大32のカスケードユニットをサポートします。精度を確保するために、平坦で安定した取り付けと軸の整列を行ってください。
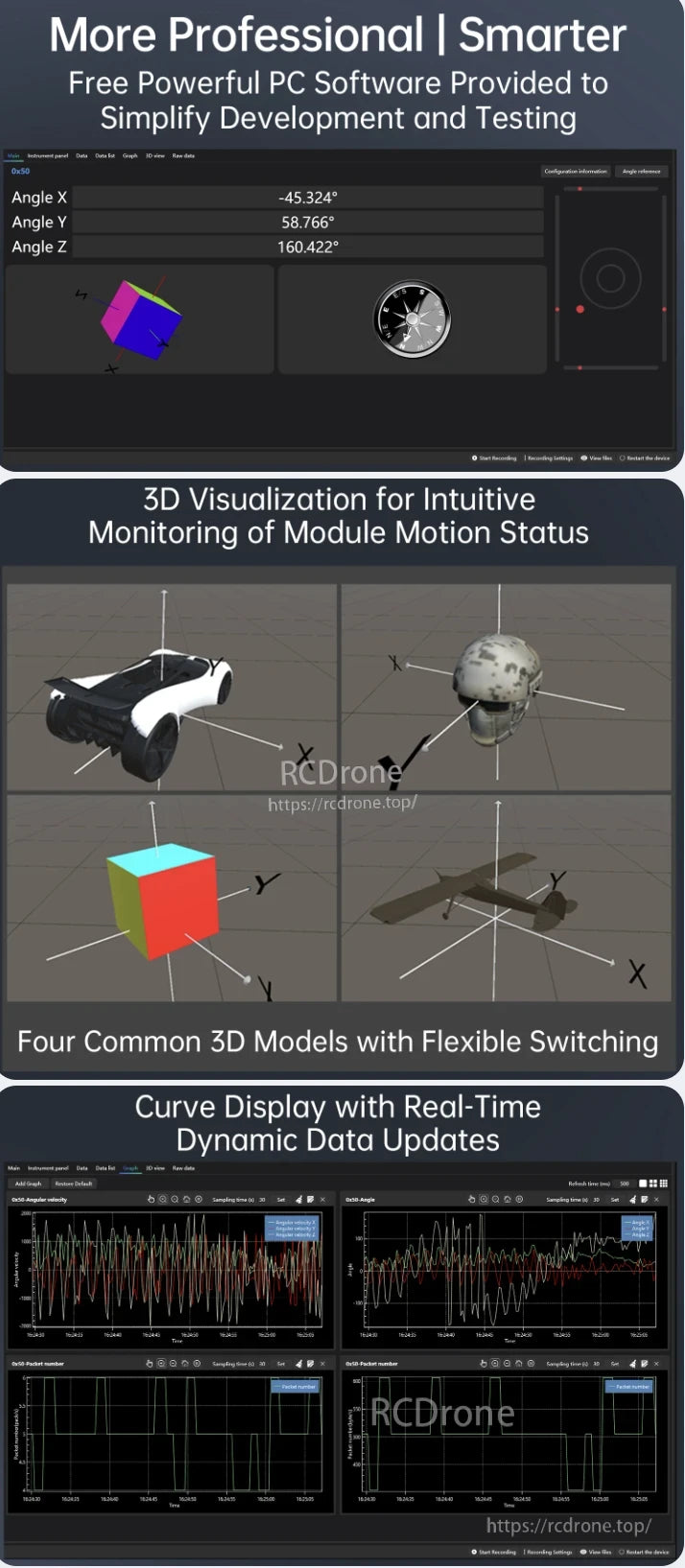
WitMotion HWT601 AGV IMU用のプロフェッショナルPCソフトウェアは、リアルタイムの3D視覚化、角度モニタリング、動的曲線表示を提供します。機能には、直感的なモーショントラッキング、柔軟なモデル切り替え、効率的な開発とテストのためのライブデータ更新が含まれています。
サポート文書には、開発者がチュートリアルやコードサンプルを使用して製品を適用するのを助けるためのSTM32、Arduino、51 UART、Windows C++、およびMatlabの例プログラムが含まれています。
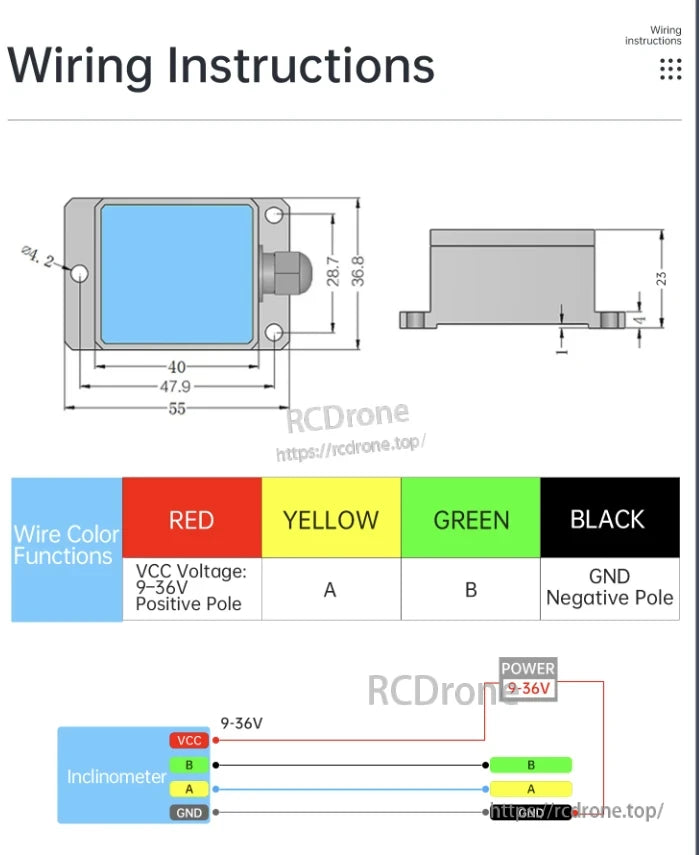
WitMotion HWT601 AGV IMU配線ガイド:赤(9-36V)、黄(A)、緑(B)、黒(GND)。寸法と接続図が提供されています。

WitMotion HWT601 AGV IMUは、ドローン、自律運転、モバイルロボット、および無人物流車両向けです。
Related Collections








