













Yahboom Muto RS 18自由度 ROS2 六脚ロボットキット(AI大型モデル、LiDAR & 深度カメラ搭載、Raspberry Pi 5対応)
Yahboom Muto RS 18自由度 ROS2 六脚ロボットキット(AI大型モデル、LiDAR & 深度カメラ搭載、Raspberry Pi 5対応)
Yahboom
受取状況を読み込めませんでした
概要
Yahboom Muto RSは、ROS2オペレーティングシステム上で構築されたデスクトップレベルのAI大型モデルバイオニック六足ロボットで、Raspberry Pi(Raspberry Pi 5オプションを含む)と連携するように設計されています。全アルミニウム合金ボディと18PCS 35KGシリアルバスサーボで駆動される18自由度の関節構造を使用し、深度カメラやLiDAR、音声対話モジュールなどのセンサーを統合しています。Python3プログラミングと組み込みアルゴリズム(逆運動学を含む)により、AIビジュアルインタラクション、SLAMマッピング/ナビゲーション、音声対話、ディープラーニング、ROS開発と教育のためのRVizシミュレーションをサポートします。
主な特徴
- アルミニウム合金構造部品を備えた18自由度のモーションジョイント ;各脚に3つの関節;18の高性能サーボ。
- 安定した協調運動制御のための18PCS 35KGメタルシリアルバスサーボ 。
- 逆運動学アルゴリズム精密制御; 三角歩行と調整可能な歩幅周波数をサポート。
- 動作調整性: X/Y平行移動、360°自転、ボディ高さ調整、姿勢重ね合わせ(高/中/低姿勢歩行)、および調整可能な歩行速度(線速度、角速度、高さ、ステップ高さ、歩幅)。
- マルチモーダルAI大規模モデル統合: スケーラブルなRAG知識ベース、デュアルモーダル動的フィードバック推論アーキテクチャ、テキスト意味理解、自然音声対話。
- 深度カメラ + ビジュアル認識: 深度カメラ障害物検出、3Dリアルタイムマッピング、深度距離測定、3Dポイントクラウド認識。
- LiDARベースの環境認識: 360°全方位センシング、マッピングとナビゲーション、経路計画、動的障害物回避、マルチポイントナビゲーション、道路ネットワーク計画。
- サポートされているフレームワーク/アルゴリズム (リスト): MediaPipe, OpenCV; Gmapping, Cartographer; slam_toolbox; レーダーオドメーター RF2O; DWA経路計画。
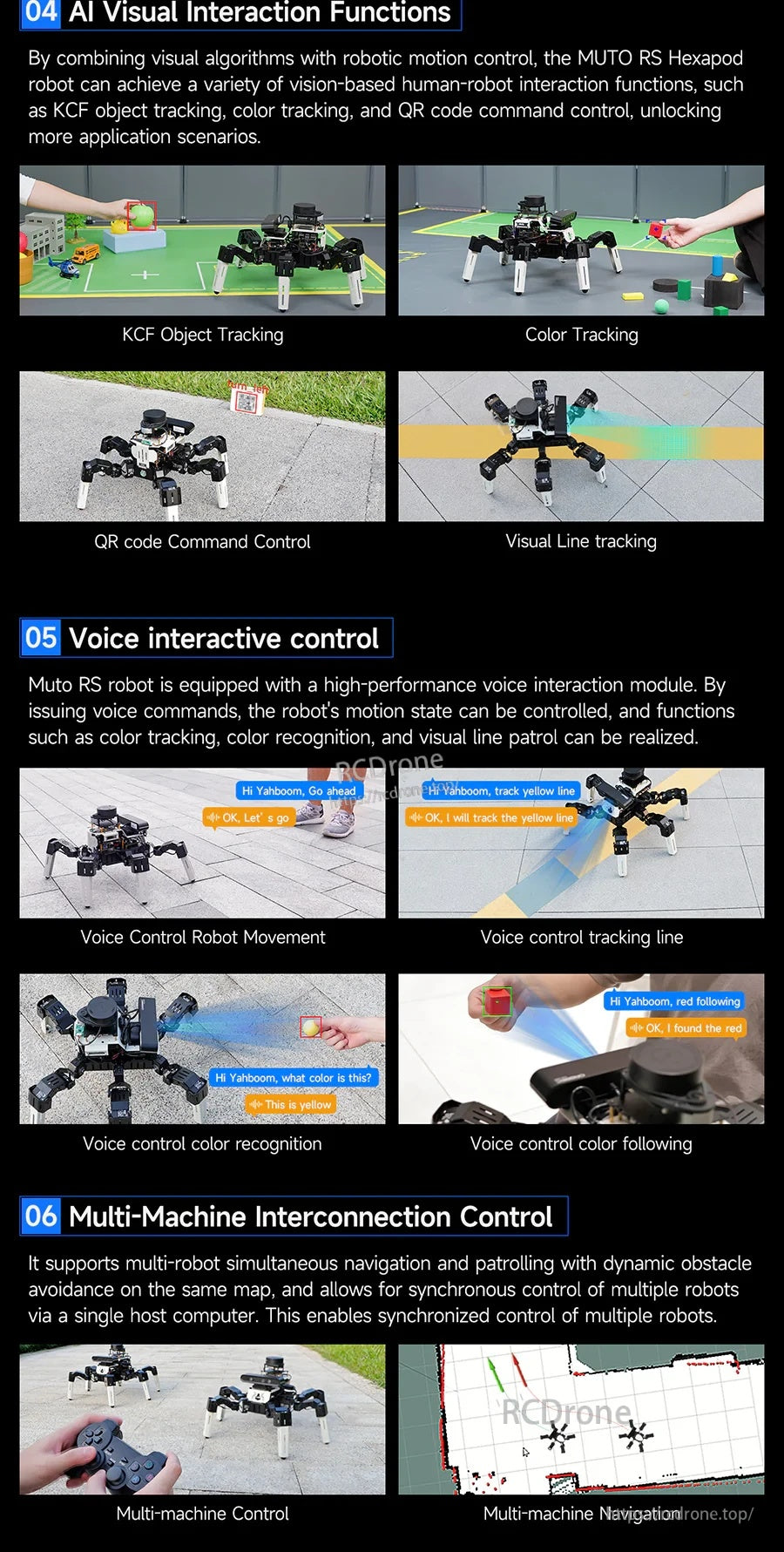
- AIビジュアルインタラクション機能 (リスト): KCFオブジェクト追跡、カラー追跡、QRコードコマンド制御、ビジュアルライン追跡。
- 音声インタラクティブ制御: 音声コマンドで動作状態を制御可能; カラー追跡、カラー認識、ビジュアルラインパトロールなどの機能をサポート。
- クロスプラットフォーム制御: iOS/Androidリモートコントロールアプリ、iOS/Androidマッピングナビゲーションアプリ、PCホストコンピュータ制御、2.4G/USBワイヤレスハンドル制御。
- FPVリアルタイムビデオ伝送: モバイルアプリを介してローカルエリアネットワークに接続し、ロボットが撮影したリアルタイムHDビデオを視聴します。
- マルチマシン相互接続制御: 同一マップ上での動的障害物回避を伴うマルチロボット同時ナビゲーションをサポートし、単一のホストコンピュータを介して同期制御が可能です。
- ティーチングモード: ホストロボットでの手動単脚動作が、スレーブロボットによって同じ動作としてミラーリングされます。
- 学習リソース: 「200以上のコース例」が参照されており、ROSコースおよびAI大規模言語モデルのアプリケーション例が説明されています(チュートリアルURLはコンプライアンスのため削除)。
事前販売の選択支援やセットアップサポートについては、https://rcdrone.top/に連絡するか、メールで[email protected] .
仕様
| モデル | Muto RS |
| ロボットタイプ | AI大型モデルROSヘキサポッドロボット |
| 自由度 | 18自由度ジョイント |
| ボディ素材 | アルミ合金(全アルミ合金ボディ参照) |
| サーボ | 18個 35KGシリアルバスサーボ(金属) |
| オペレーティングシステム / 開発 | ROS2; Python3; RVizシミュレーションをサポート; dockerコンテナ開発(参照) |
| センサー / モジュール(参照) | 深度カメラ; LiDAR; 音声対話モジュール; 大容量バッテリーパック |
| 深度カメラ(リスト) | Astra Pro Plus 深度カメラ |
構成の違い(リストとして)
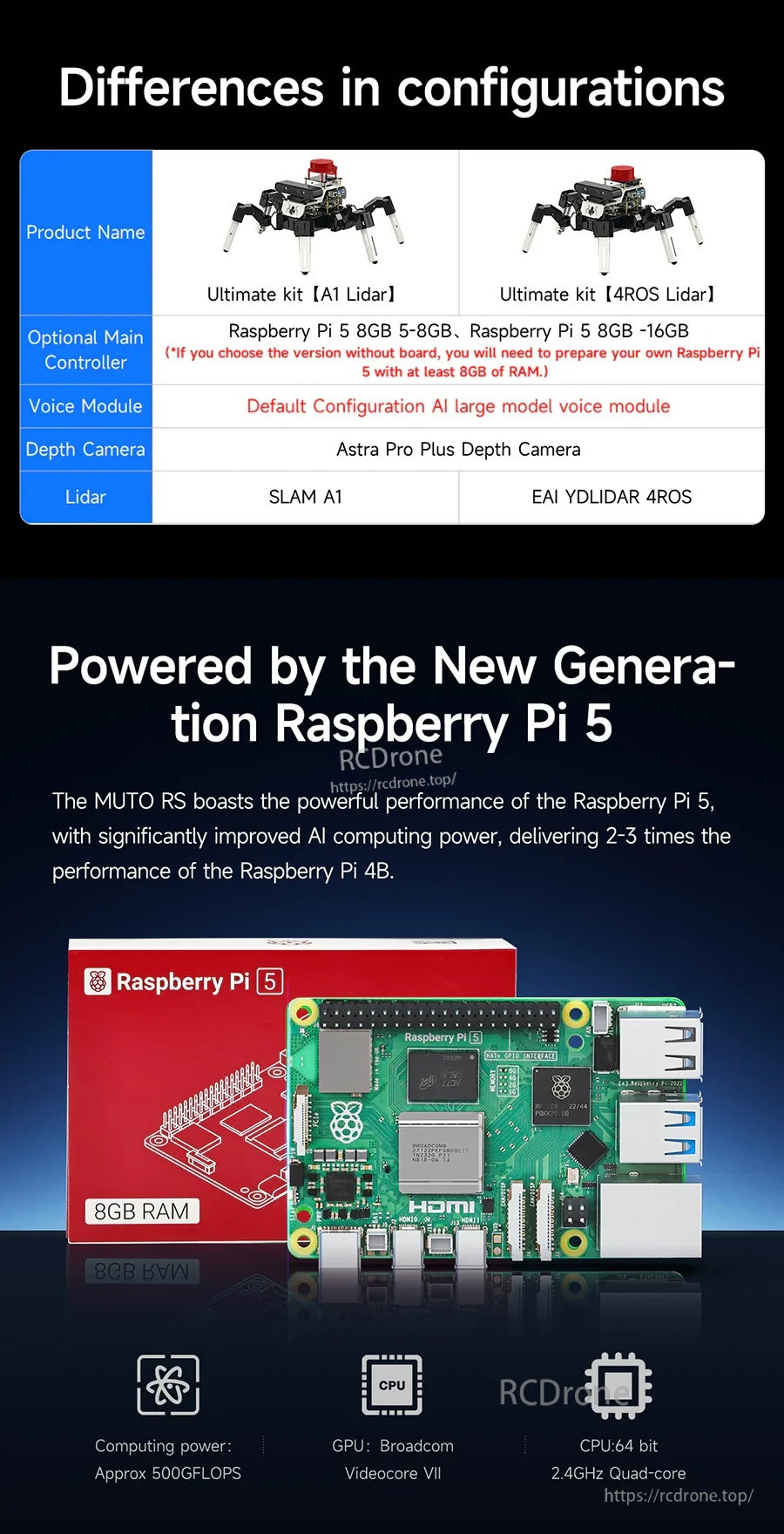
| 項目 | 究極のキット [A1 Lidar] | 究極のキット [4ROS Lidar] |
|---|---|---|
| オプションのメインコントローラー | Raspberry Pi 5 8GB | Raspberry Pi 5 8GB–16GB |
| 注記(リスト) | ボードなしのバージョンを選択する場合は、少なくとも8GB RAMを搭載したRaspberry Pi 5を準備してください。 | |
| 音声モジュール | デフォルト設定: AI大型モデル音声モジュール | |
| 深度カメラ | Astra Pro Plus 深度カメラ | |
| LiDAR | SLAM A1 | EAI YDLIDAR 4ROS |
Raspberry Pi 5 (情報表示)
| RAM (表示) | 8GB RAM |
| 計算能力 (表示) | 約500GFLOPS |
| GPU (表示) | Broadcom Videocore VII |
| CPU (表示) | 64ビット 2.4GHz クアッドコア |
| 性能声明 (表示) | Raspberry Pi 4Bの2〜3倍の性能 (記載) |
アプリケーション
- ROS2の学習と開発、マルチレッグ(ヘキサポッド)移動と逆運動学。
- SLAMマッピング/ナビゲーション実験:単一ポイントおよびマルチポイントナビゲーション、道路ネットワーク計画、動的障害物回避。
- 深度カメラとAI視覚認識を使用したコンピュータビジョンおよび認識プロジェクト(OpenCV / MediaPipe参照)。
- 音声インタラクションとマルチモーダル大規模モデルのデモンストレーション(テキスト/音声/視覚統合参照)。
- マルチロボット同期制御とマルチロボットナビゲーション(マルチマシン相互接続制御参照)。
マニュアル
この製品のチュートリアルリソースが参照されています(製造元の学習ページがソースで言及されています; コンプライアンスのため外部URLは削除されました)。
詳細
Raspberry Pi用にROS2で構築されたMuto RSは、デスクトップロボティクス学習のために18-DOFのヘキサポッドモビリティとAI認識を組み合わせています。

SLAMマッピングとナビゲーションからビジョンと音声インタラクションまで、このプラットフォームはオールインワンのROS2開発キットとして設計されています。
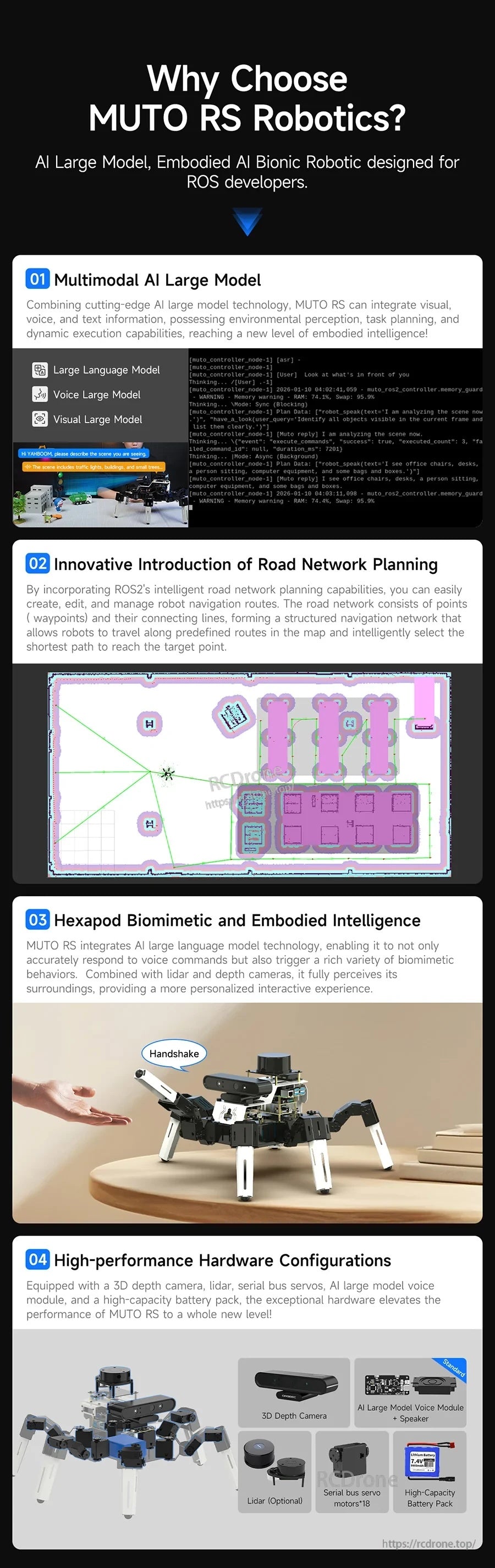
マルチモーダルAIワークフローは、道路ネットワーク計画の概念と組み合わせて、研究デモや教室での指導をサポートします。
Raspberry Piコンピュートを中心としたオプションで、コントローラーとセンサーのニーズに合った構成を選択してください。
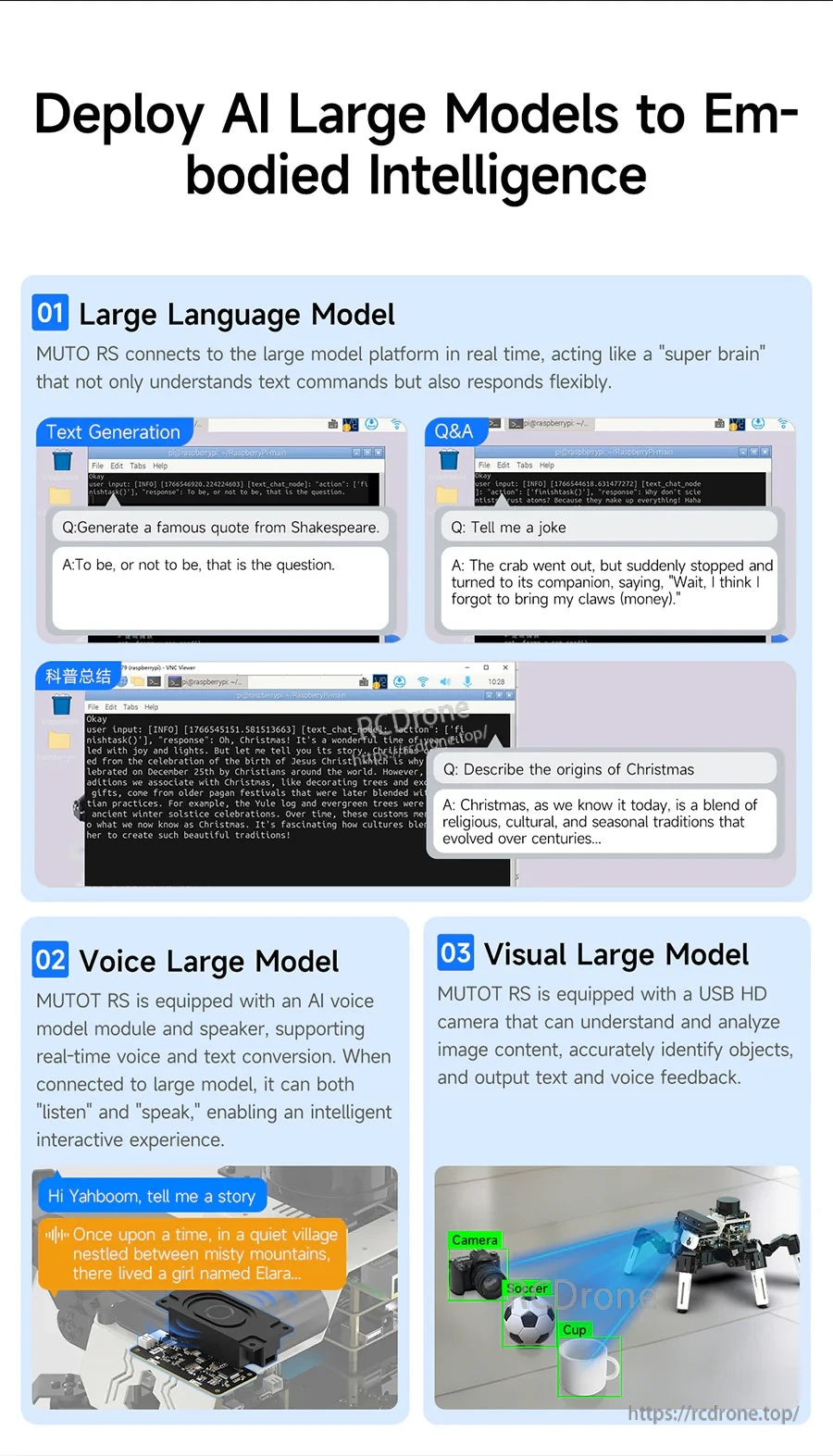
テキスト、音声、ビジョンモデルを統合して、PythonとROS2で具現化されたインテリジェンス行動を構築できます。

移動、知覚Q&A、ターゲット追跡、自律ナビゲーションタスクのための高レベルコマンドを使用します。
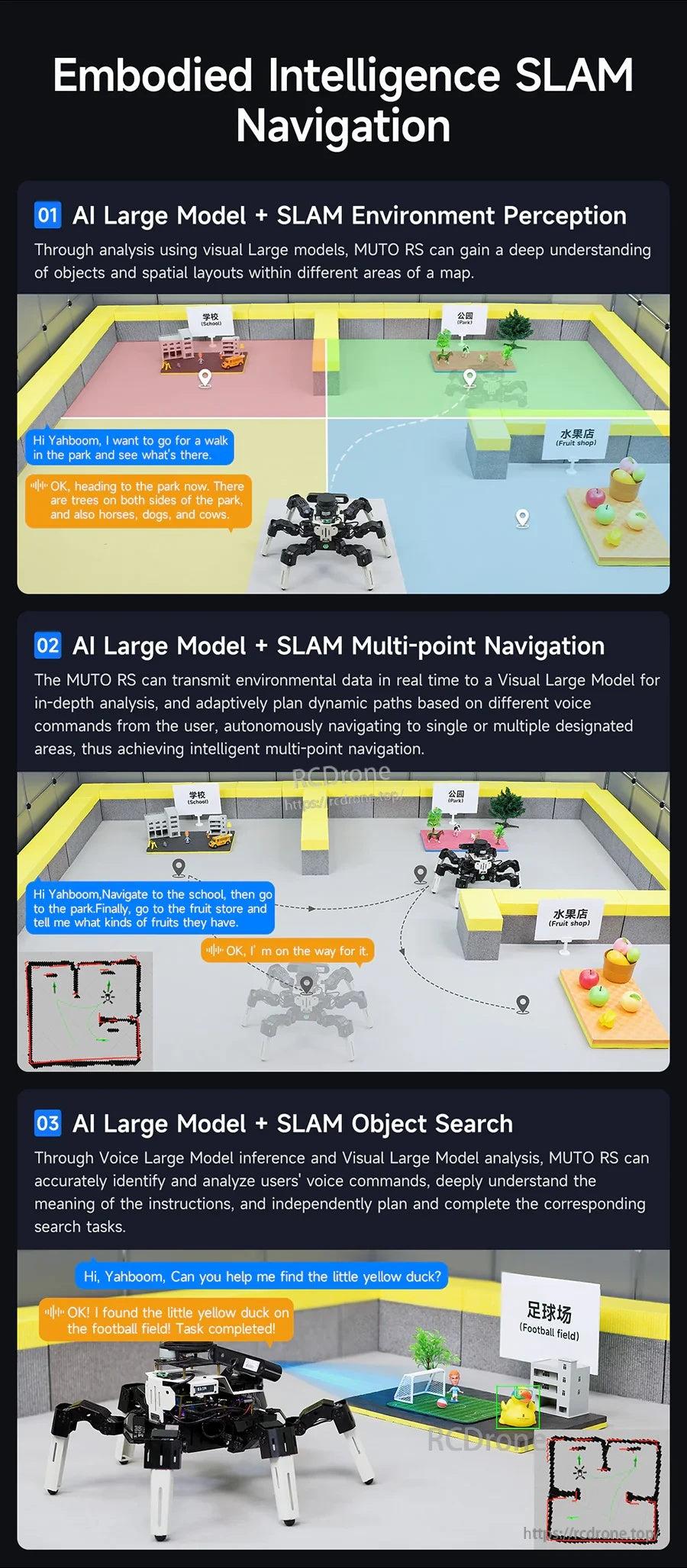
SLAMベースの知覚は、マッピングされた環境全体でのマルチポイントナビゲーションとターゲット検索行動をサポートします。
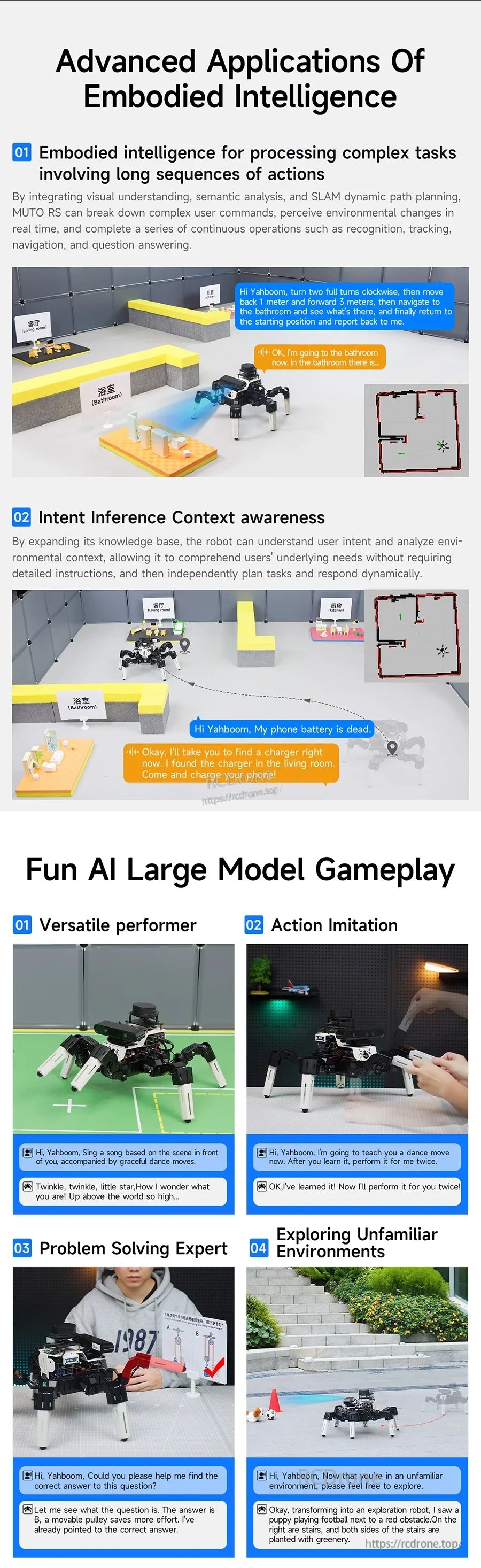
高レベルのインタラクションデモには、意図理解、模倣学習行動、環境探索が含まれます。
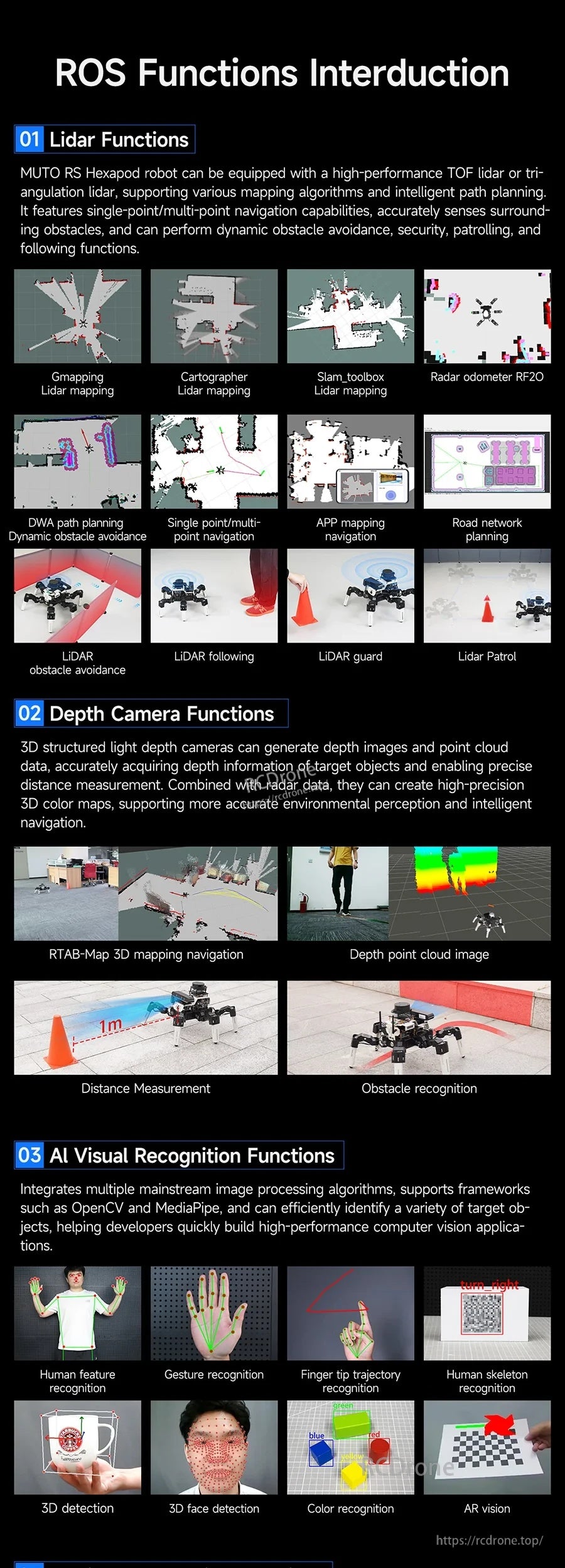
組み込みのROS2パッケージは、LiDARと深度カメラデータを接続して、マッピング、点群、および障害物認識を行います。
ビジョンアルゴリズムと音声コマンドにより、ハンズフリー制御が可能になり、マルチロボット協調機能をサポートします。

ティーチングモードと完全な18-DOFジョイントレイアウトにより、歩行と協調した脚の動作を示すのが容易になります。

逆運動学と歩行計画により、姿勢と歩幅の設定を安定したヘキサポッドの動きに変換します。
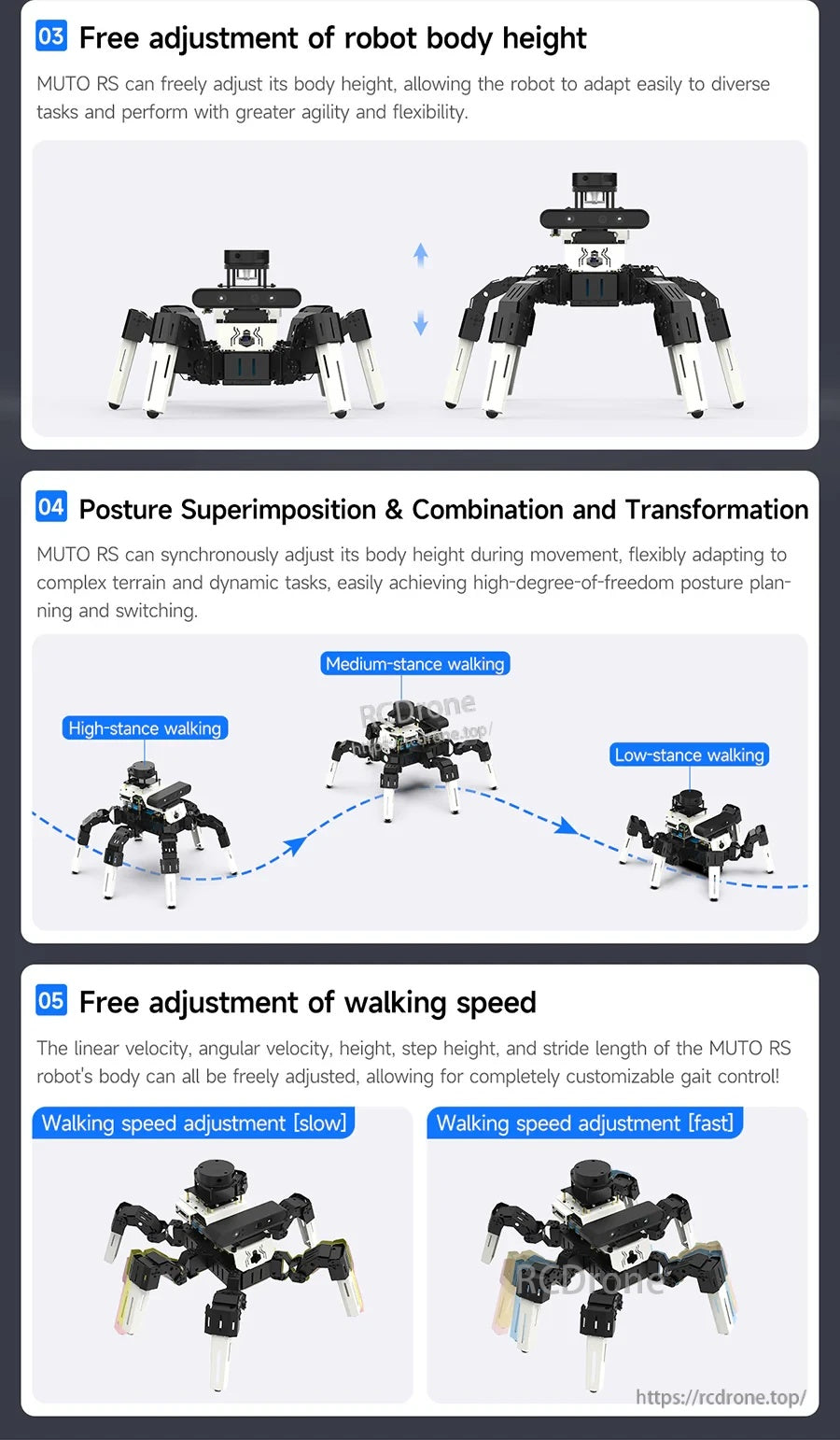
異なる表面、デモ、およびナビゲーションシナリオに合わせて、体の高さ、姿勢、歩行速度を調整します。
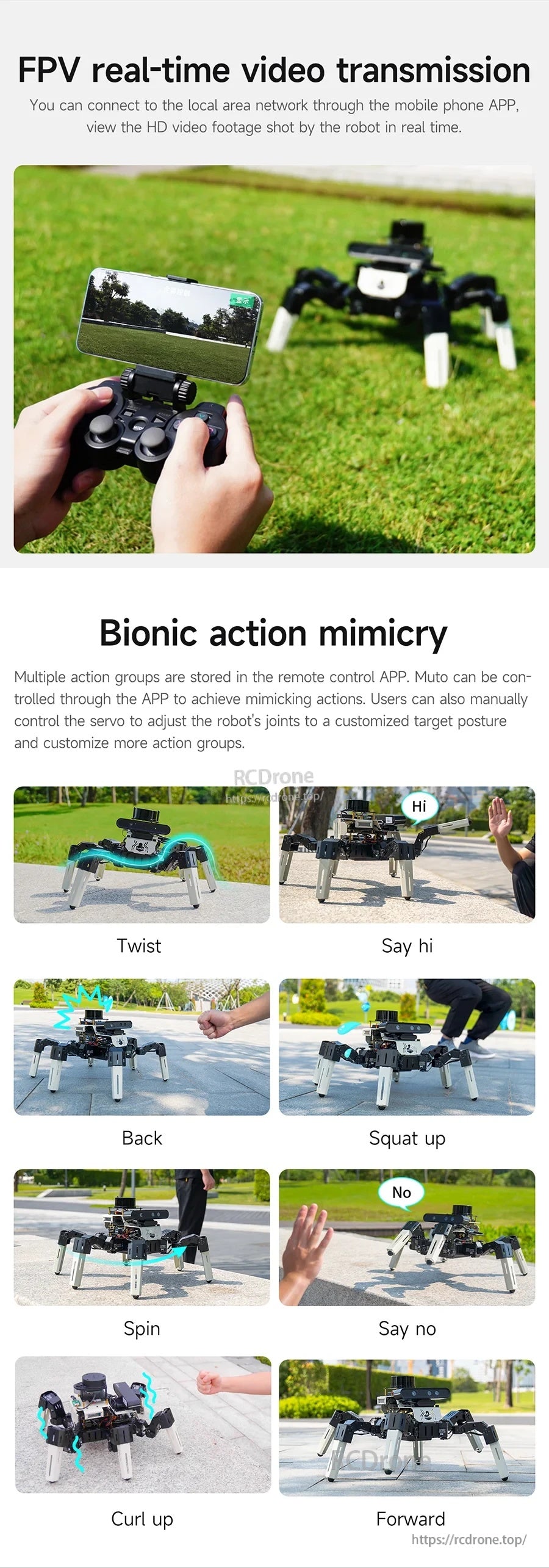
FPVビデオとアクション模倣行動により、ラボ、クラブ、プレゼンテーションでのデモがよりインタラクティブになります。
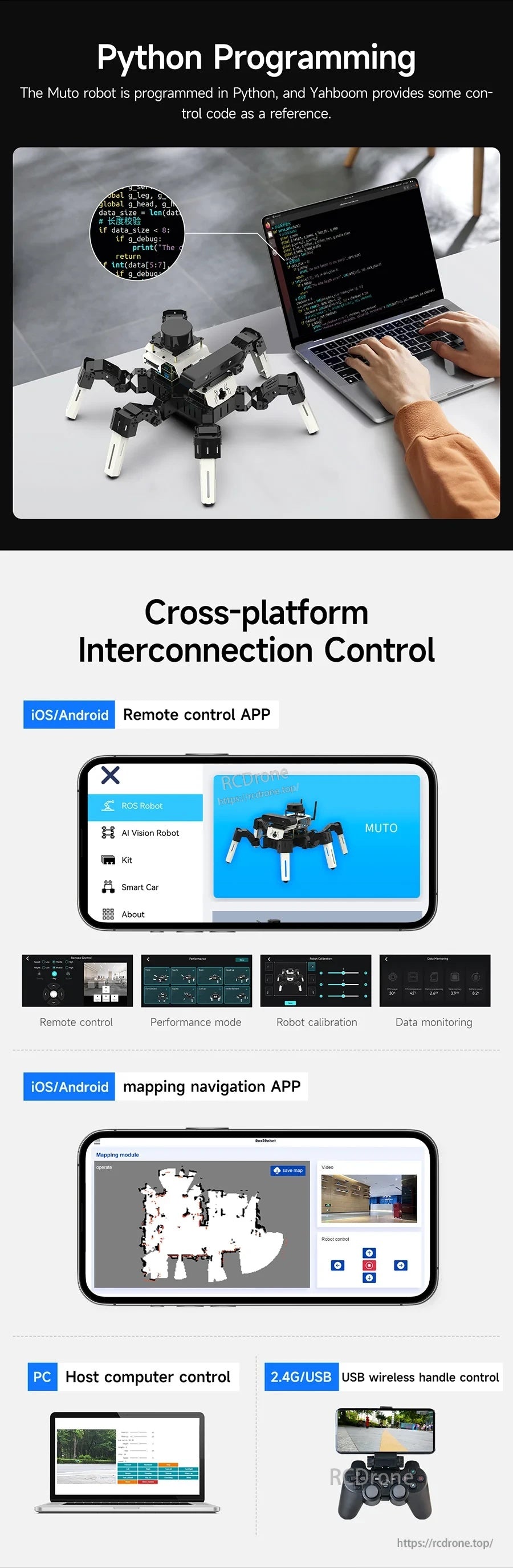
Pythonでプログラムし、セットアップに応じてモバイルアプリ、PCホスト、またはワイヤレスハンドルからロボットを制御します。
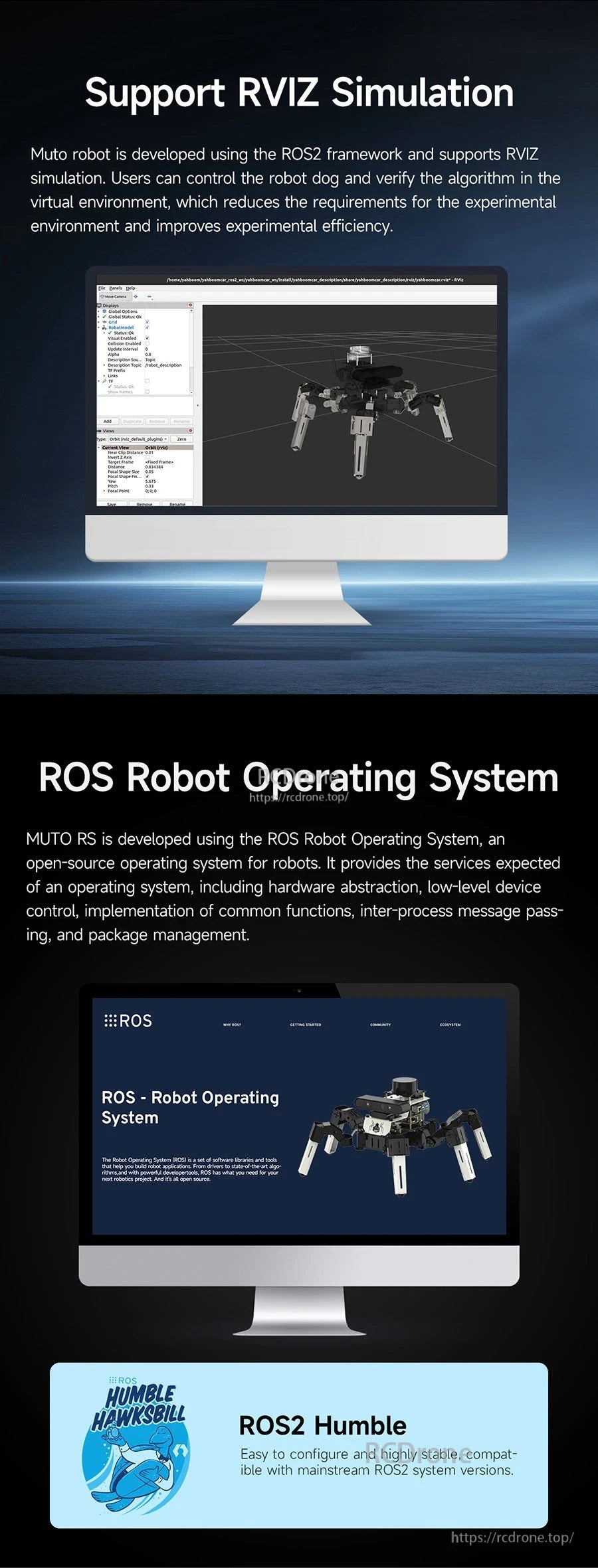
RVizシミュレーションで開発とテストを行い、その後ROS2スタックにデプロイして、繰り返し可能なロボティクス実験を行います。
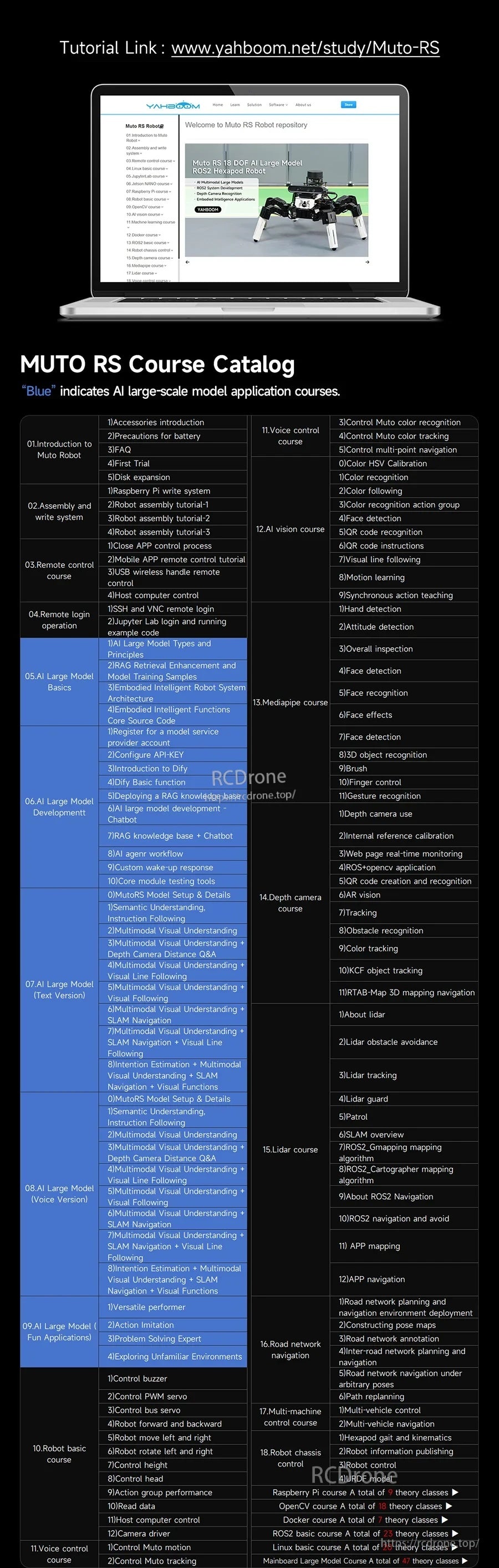
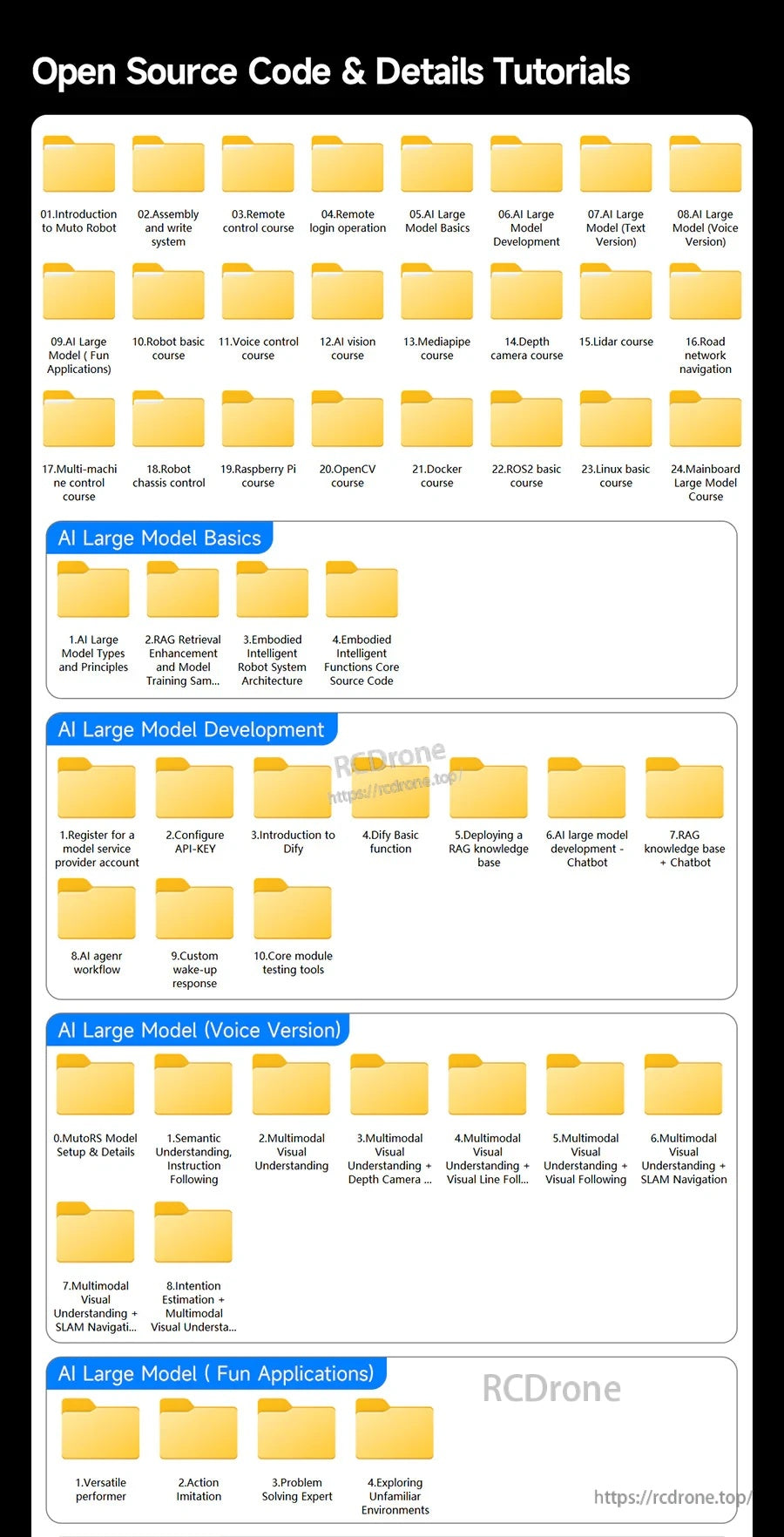
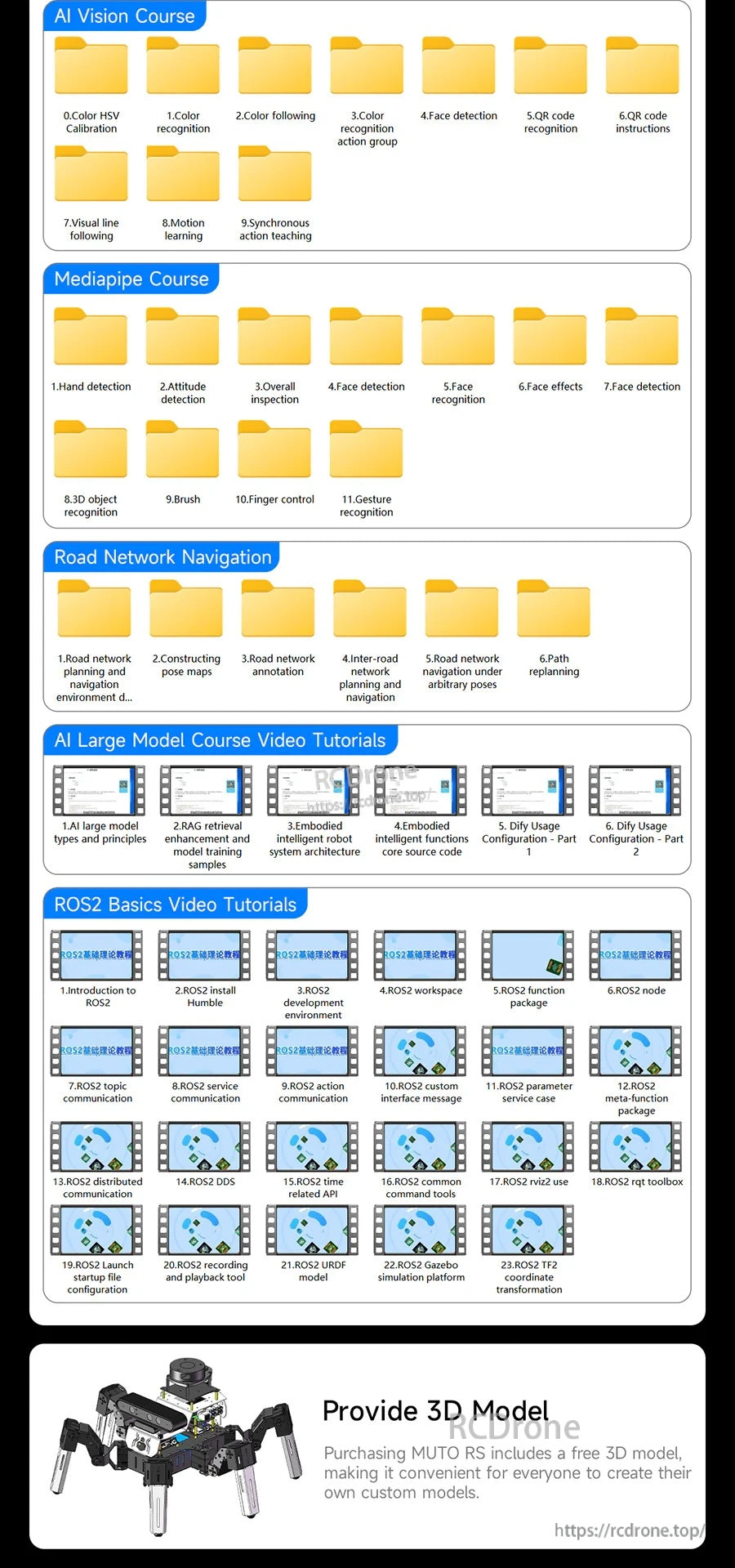
Yahboom Muto RS ROS2学習資料には、AIビジョン、Mediapipe、道路ネットワークナビゲーション、ROS2基礎ビデオチュートリアルが含まれています。

Muto RSヘキサポッドは、ライダー、深度カメラ、Raspberry Piコントローラー、シリアルバスサーボなどのコンポーネントを備えたモジュラースタックを使用して、脚の協調運動を実現します。

Orbbec Astra Pro Plus深度センサーと2D LiDAR SLAMモジュールは、ROS2ロボティクスプロジェクトのための深度とマッピング入力を提供します。
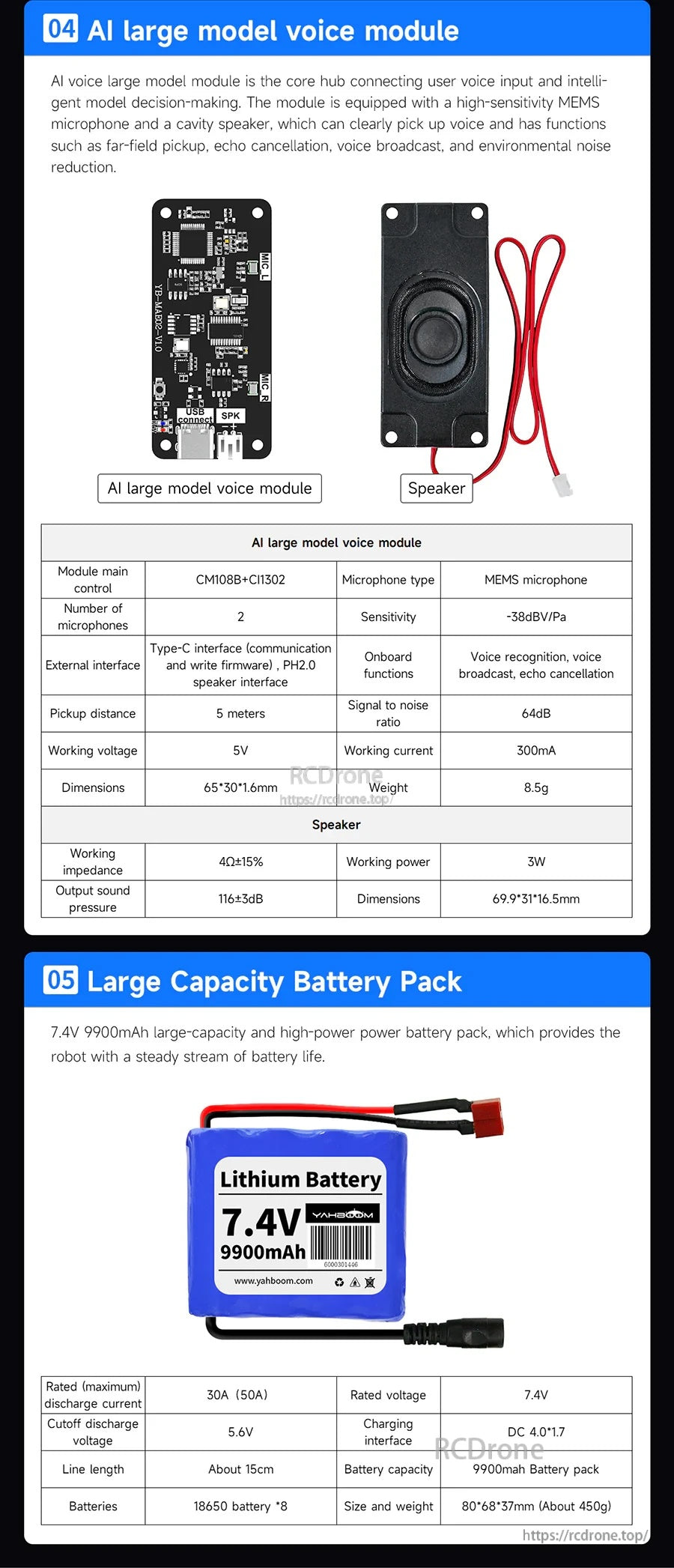
キットには、有線スピーカー付きAI音声モジュールと、オンボード電源用の7.4V 9900mAhリチウムバッテリーパックが含まれています。
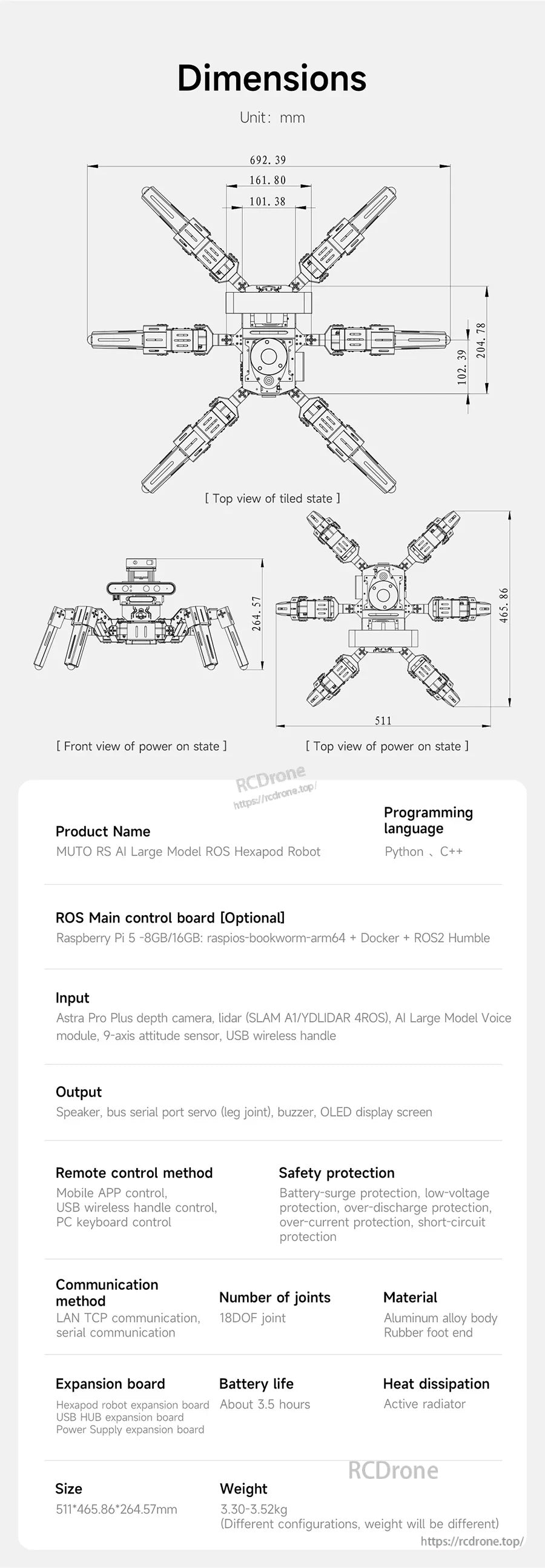
Yahboom Muto RS ROS2ヘキサポッドには、取り付けクリアランスと配置を計画するためのマルチビューmm寸法リファレンスが含まれています。
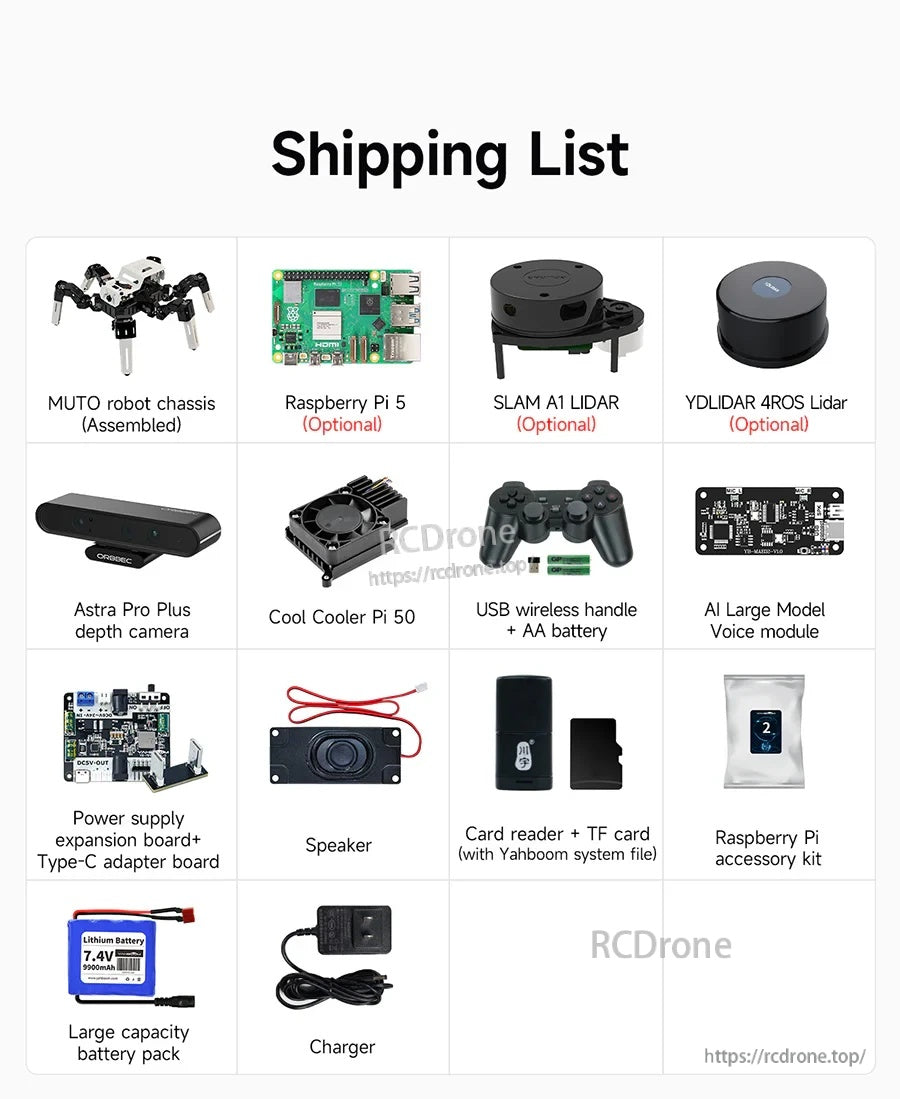
パッケージリストには、組み立て済みのMUTOロボットシャーシに加え、Raspberry Pi 5、SLAM Lidar、深度カメラなどのオプションの追加機能、さらに電源およびオーディオアクセサリーが含まれています。
Related Collections


















