ZED-F9P-01B-01 RTK GNSS 수신기 보드, USB-C, UART2 RTCM3, SMA & U.FL 안테나, Pixhawk GH1.25-6P
ZED-F9P-01B-01 RTK GNSS 수신기 보드, USB-C, UART2 RTCM3, SMA & U.FL 안테나, Pixhawk GH1.25-6P
RCDrone
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
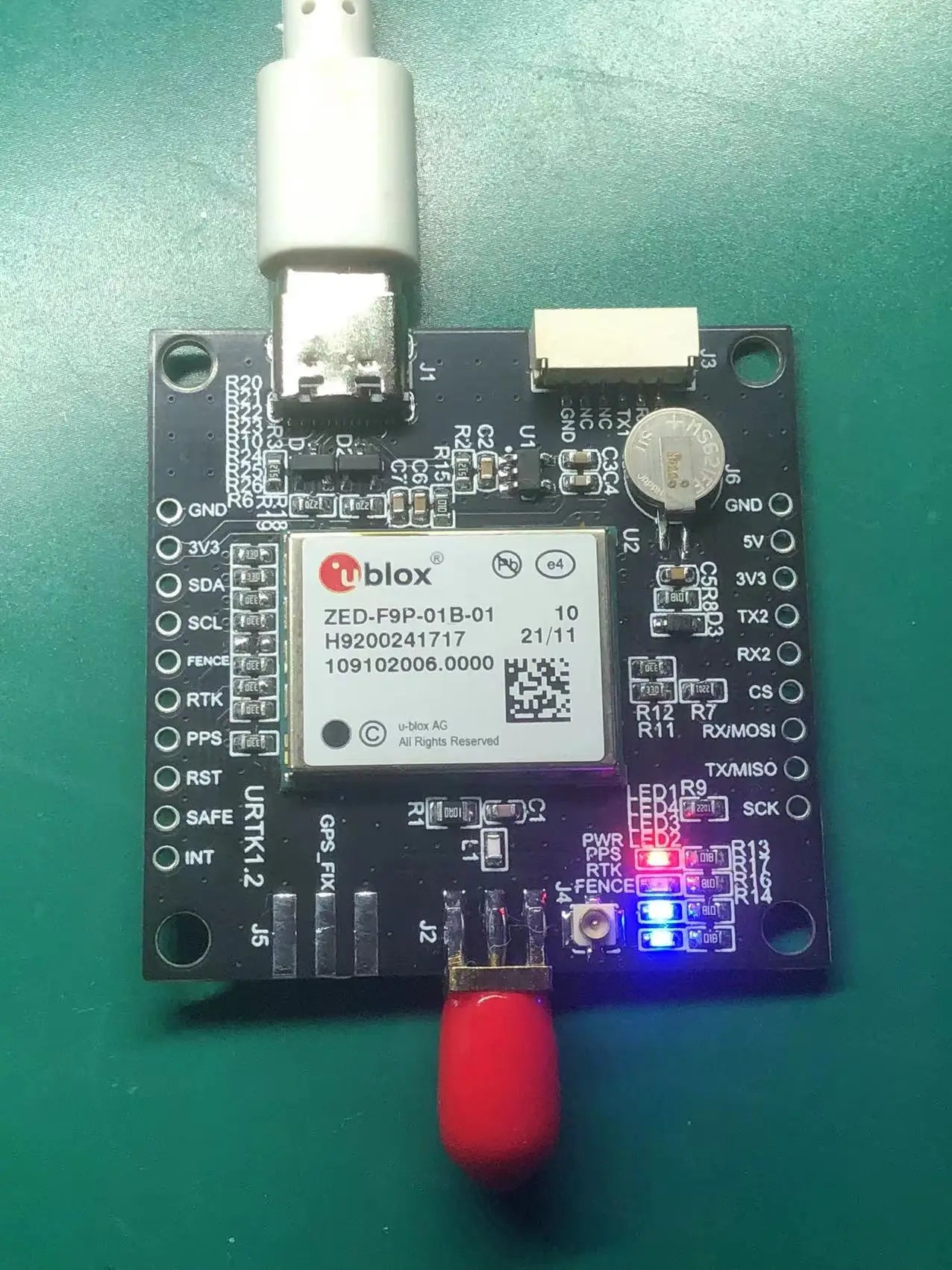
이 GNSS 수신기 보드는 u-blox ZED-F9P-01B-01 모듈을 기반으로 하며, USB-C, UART/SPI 핀 및 로봇 공학, 자동 조종 장치 및 내비게이션 시스템 통합을 위한 이중 안테나 커넥터 옵션을 통해 RTK 차별 위치 지원을 제공합니다.
주요 특징
- USB 인터페이스: u-center로 구성 및 NMEA 문장을 빠르게 보기 위한 USB Type-C 연결; UART 인터페이스와 독립적인 직렬 COM 포트로 열거됩니다.
- 전원 옵션: 온보드 3.3V 레귤레이터가 5V USB를 모듈에 필요한 3.3V로 변환; 외부 5V 입력 또는 직접 3.3V 공급을 지원합니다.
- 저소음 3.3V 권장 사항: 3.3V를 직접 공급할 때는 최소한의 노이즈로 깨끗한 공급이 권장됩니다(정확한 위치 지정을 위해 50mV PVP 리플 이하가 이상적이라고 명시됨).
- UART/SPI 공유: 클래식 직렬 핀은 사용 가능하지만 SPI 핀과 공유됩니다; 기본적으로 UART 핀이 활성화되어 있습니다.DSEL 점퍼는 보드 뒷면에서 열려 있어야 합니다.
- UART2에서의 RTCM3 처리: 두 번째 직렬 포트(UART2)는 주로 RTCM3 보정 데이터를 위해 사용됩니다. 기본적으로 자동으로 수신하고 RTCM3를 구문 분석하여 RTK 모드를 활성화합니다. 기지국 모드에서는 UART2가 RTCM3 보정 데이터를 출력합니다.
- 자율 비행기 연결기: Pixhawk 자율 비행기와 연결하거나 보드에 전원을 공급하기 위한 GH1.25-6P (Pixhawk JST-GH 표준)입니다.
- 안테나 연결기: 두 개의 안테나 인터페이스가 제공됩니다: SMA (외부 나사, 내부 구멍) 및 U.FL (IPEX); 둘 중 하나를 사용할 수 있습니다.
- 상태 LED: 시스템/RTK/지오펜싱 표시를 위한 네 개의 상태 LED(전원, PPS, RTK, FENCE)입니다.
사양
| GNSS 모듈 (모듈 레이블) | u-blox ZED-F9P-01B-01 |
| 보드 마킹 (보드 사진에서 확인 가능) | ZED-F9P-01B-00 |
| USB | USB Type-C; 직렬 COM 포트로 인식됨 (UART와 독립적) |
| 직렬 / SPI | UART 핀은 SPI 핀과 공유됨; 기본적으로 UART가 활성화됨; DSEL 점퍼는 뒤쪽에서 열려 있어야 함 |
| UART 핀 방향 (SPI와 공유) | TX/MISO = ZED-F9P의 출력; RX/MOSI = ZED-F9P의 RX |
| 두 번째 직렬 포트 | UART2 (주로 RTCM3 보정 데이터용; 기지국 모드에서 RTCM3 출력 가능) |
| 전원 조절 | 5V USB를 3.3V로 조절하기 위해 제공되는 3.3V 레귤레이터.3V 모듈 요구 사항 |
| 전원 입력 옵션 (명시됨) | USB 5V, 외부 5V 또는 직접 3.3V 공급 |
| 3.3V 공급 노이즈 주의 사항 (명시됨) | 3.3V를 직접 공급할 때 이상적인 PVP 리플은 50mV 미만으로 명시됨 |
| 3.3V 레귤레이터 능력 (명시됨) | 5V 입력에서 600mA |
| USB-C 전원 능력 (명시됨) | 2A 제공 가능 |
| J3 포트 | GH1.25-6P (Pixhawk JST-GH 표준) |
| J3 핀 배치 (Pixhawk 표준) | 1: 5V_IN; 2: ZED-F9P UART1 수신 (3.3V 레벨); 3: ZED-F9P UART1 TX (3.3V 레벨); 4,5: 연결되지 않음; 6: 접지 |
| LED 표시기 (설명됨) | 전원 (3.3V USB 또는 Qwiic 버스를 통해 활성화됨); PPS (노란색, 위치 잠금 후 초당 한 번); RTK (파란색: 전원 후 켜짐, RTCM 데이터 수신 후 깜박임, RTK 수정 후 꺼짐); FENCE (지오펜싱 애플리케이션을 위한 구성 가능) |
| 안테나 인터페이스 | SMA 및 U.FL (IPEX); 두 인터페이스 모두 허용됨 |
| 헤더 레이블 (실크스크린, 왼쪽) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| 헤더 레이블 (실크스크린, 오른쪽) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
응용 프로그램
- 드론, UGV, 로봇 및 내비게이션 프로토타입을 위한 RTK GNSS 위치 지정
- JST-GH를 통한 Pixhawk/자율 비행 GNSS 통합 (GH1.25-6P) 직렬 연결
- RTCM3 기반 RTK 설정은 수정 데이터 링크(무선 또는 유선)를 위해 UART2를 사용합니다.
호환성 질문(UART/SPI 선택, RTCM3 배선, 안테나 또는 통합)에 대해서는 https://rcdrone.top/로 지원팀에 문의하시거나 이메일 [email protected].
자세한 내용

ZED-F9P 수신기 보드는 USB-C 연결과 명확하게 라벨이 붙은 I/O 핀 및 U.FL 안테나 커넥터를 결합하여 간편한 통합을 제공합니다.
USB‑C 인터페이스는 ZED‑F9P를 독립적인 직렬 COM 포트로 u‑center 또는 Raspberry Pi에 연결하며, 5V USB 전원에서 3.3V 전압 조절을 제공합니다.
ZED-F9P 보드는 공유 UART/SPI 핀과 RTCM3 수정 데이터를 위해 일반적으로 사용되는 두 번째 직렬 포트(UART2)를 사용하여 RTK 모드를 활성화합니다.
J3 GH1.25-6P Pixhawk 커넥터 핀 배치는 5V_IN, UART1 RX/TX (3.3V 레벨) 및 접지, 보드는 전원, PPS 잠금 및 RTK/RTCM 활동을 위한 네 개의 상태 LED를 사용합니다.
ZED-F9P RTK GNSS 수신기 보드는 유연한 설치를 위해 두 가지 안테나 인터페이스 옵션—SMA 및 U.FL (IPEX)—을 제공합니다.
Related Collections