

















SteadyWin GIM3505-8 내장형 유성 감속 모터 — 4족 로봇 관절 모듈, 8:1 기어, 24V, CAN, IP54
SteadyWin GIM3505-8 내장형 유성 감속 모터 — 4족 로봇 관절 모듈, 8:1 기어, 24V, CAN, IP54
SteadyWin
정가
$80.00 USD
정가
$90.00 USD
할인가
$80.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
SteadyWin GIM3505-8 내장형 행성 감속 모터 사족 보행 로봇 관절 모듈은 컴팩트한 로봇 관절 및 액추에이터 조립을 위해 설계되었습니다. GIM3505-8은 8:1 행성 감속기를 브러시리스 모터 및 온보드 드라이버 옵션과 통합하여 사족 보행 로봇, 로봇 팔, 휴머노이드 관절 및 유사한 메카트로닉 시스템을 위한 제어된 움직임을 제공합니다.
주요 특징
- 낮은 백래시와 부드러운 움직임을 위한 고급 행성 기어 시스템(기어 백래시: 15 아크분).
- 넓은 전압 적응성: 정격 전압 24 V, 작동 범위 12~48 V.
- 높은 토크 밀도 및 효율성: 토크 상수 0.52 N·m/A, 정격 토크 0.65 N·m, 피크 토크 1.27 N·m.
- 컴팩트한 크기: Ø43 × 23.6 mm (드라이버 없음); Ø43 × 30 mm (드라이버 포함).
- 통합 안전 보호 장치: 과열, 과전압 및 과부하 보호(제품 문서에 명시된 삼중 보호).
- CAN 통신 인터페이스; 별도의 인코더 및 선택적 맞춤 브레이크를 지원합니다.
사양
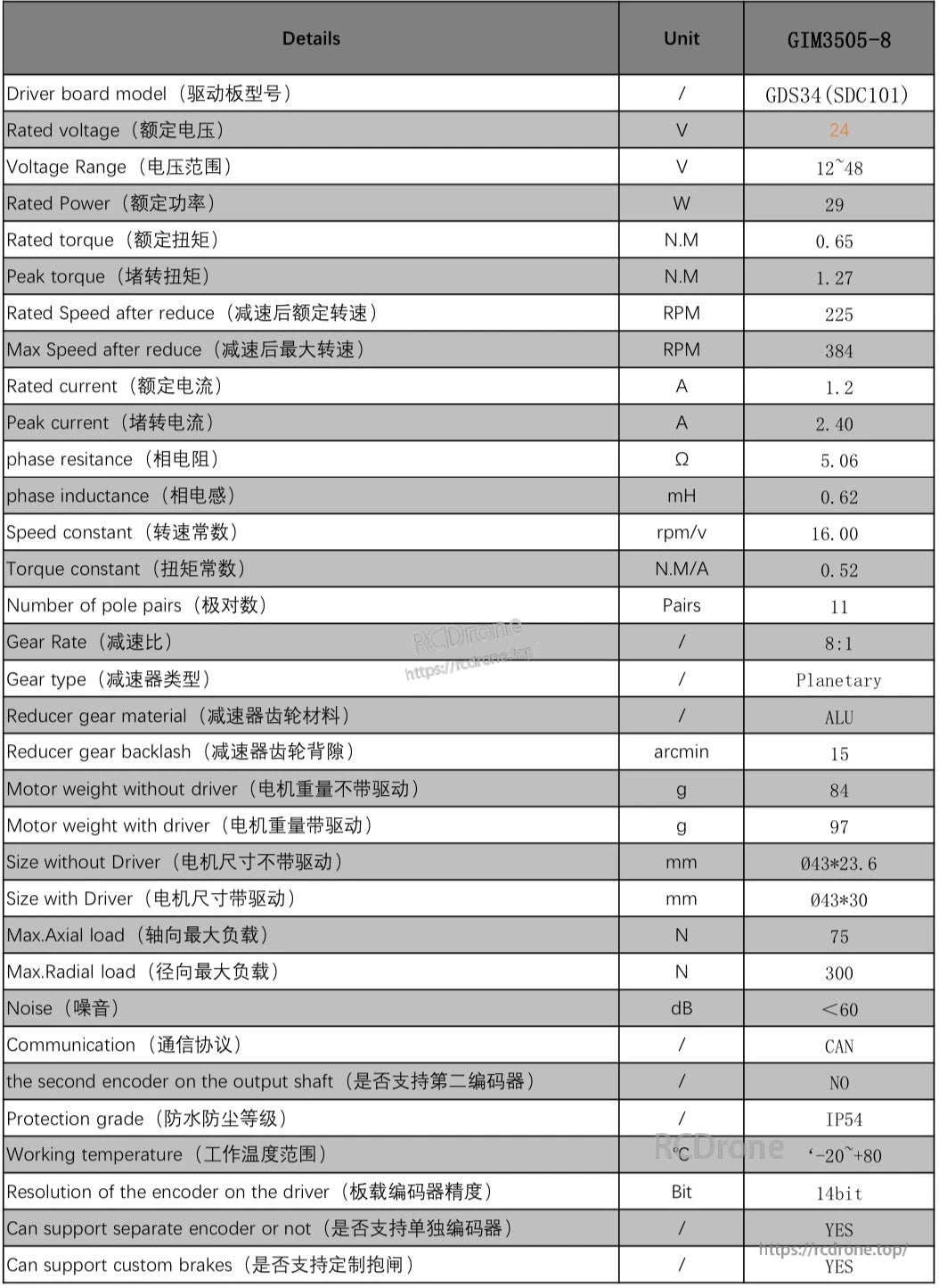
매개변수 값 ---------------------------------------- -------------------------- 모델 GIM3505-8 드라이버 보드 모델 GDS34 (SDC101) 정격 전압 24 V 전압 범위 12~48 V 정격 전력 29 W 정격 토크 0.65 N·m 최대(정지) 토크 1.27 N·m 감속 후 정격 속도 225 RPM 감속 후 최대 속도 384 RPM 정격 전류 1.2 A 최대(정지) 전류 2.4 A 상 저항 5.06 Ω 상 인덕턴스 0.62 mH 속도 상수 16 rpm/V 토크 상수 0.52 N·m/A 극 쌍 수 11 쌍 기어 비 8:1 기어 유형 행성 기어 감속기 기어 재질 ALU 감속기 기어 백래시 15 아크분 모터 무게 (드라이버 제외) 84 g 모터 무게 (드라이버 포함) 97 g 크기 (드라이버 제외) Ø43*23.6 mm 크기 (드라이버 포함) Ø43*30 mm 최대 축 방향 하중 75 N 최대 방사 방향 하중 300 N 소음 <60 dB 통신 CAN 출력 샤프트의 두 번째 인코더 없음 보호 등급 IP54 작동 온도 -20°C ~ +80°C 드라이버의 인코더 해상도 14 비트 별도의 인코더 지원 예 맞춤형 브레이크 지원 예
응용 분야
- 4족 보행 로봇 (다리 관절 및 액추에이터)
- 휴머노이드 로봇 관절
- 로봇 팔 및 조작기
- 외골격 액추에이터
- AGV/AMR 조향 및 관절 모듈
- 자율 연구 및 대학 로봇 프로젝트
고객 서비스 및 기술 문의는 [email protected]에 연락하십시오.
매뉴얼
세부사항


SteadyWin GIM3505-8 조인트 사양: 24V, 29W, 0.65N.M 토크, 행성 기어, CAN 통신, IP54 등급, 맞춤형 브레이크 및 별도의 인코더 지원, 작동 온도 -20°C ~ +80°C.
Related Collections

















