




CEREBOTO OpenArm 7자유도 로봇 팔 키트 – DIY 또는 완제품, 오픈소스 ROS/Python 제어
CEREBOTO OpenArm 7자유도 로봇 팔 키트 – DIY 또는 완제품, 오픈소스 ROS/Python 제어
CEREBOTO
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CEREBOTO OpenArm 7DOF 로봇 팔은 대학, 연구소, 스타트업 및 진지한 제작자를 위해 설계된 연구용 로봇 팔입니다. 7개의 자유도를 갖추고 있으며, 633mm의 팔 길이, 일반 하중 4.1kg 및 최대 하중 6.0kg을 지원하여 OpenArm은 고정밀 동작, 안전한 물리적 상호작용 및 풍부한 오픈 소스 도구를 제공합니다.
전체 손 조립을 위한 DIY 하드웨어 키트를 선택하거나 공장에서 보정된 사용 준비 완료된 로봇 팔을 선택할 수 있습니다. 단일 팔, 이중 팔 및 쿼드 팔 구성 옵션이 제공됩니다.
주요 특징
-
7DOF 인간 규모 로봇 팔 – 자연스러운 조작 및 원거리 조작을 위해 160–165cm 인간 팔 길이에 맞춰 설계되었습니다.
-
높은 하중 &및 안정성 – 일반 하중 4.1kg, 최대 하중 6.0kg, 경량 5.5kg 팔 무게.
-
백드라이버블 모터 &및 컴플라이언트 구조 – 인간-로봇 협업 및 힘 제어 작업을 위한 안전하고 부드러운 상호작용.
-
1 kHz CAN-FD 제어 루프 – 고성능 연구 및 산업용 애플리케이션을 위한 실시간, 저지연 제어.
-
전금속 구조 – 강성과 내구성을 위한 견고한 알루미늄 합금 및 스테인리스 스틸 주요 구조.
-
오픈 소스 하드웨어 &및 소프트웨어 – 깊은 커스터마이징을 위한 오픈 CAD, PCB, 펌웨어 및 제어 소프트웨어.
-
ROS, Python 및 C++ 지원 – 빠른 알고리즘 개발을 위한 공식 ROS 통합 및 Python/C++ API.
-
풍부한 생태계 및 확장 – 완전한 로봇 플랫폼을 위한 능숙한 로봇 손, 모션 캡처 장갑 및 이동 기반을 지원합니다.
기술 사양
-
자유도: 각 팔당 7 DOF
-
팔 길이: 633 mm
-
일반 하중: 4.1 kg
-
최대 하중: 각 팔당 6.0 kg
-
팔 무게: 약 5.5 kg per arm
-
재료: 알루미늄 합금 및 스테인리스 스틸 구조 부품
-
제어 인터페이스: CAN / CAN-FD, UART (듀얼/쿼드 암 버전의 포함된 USB2CANFD-X2 어댑터를 통해)
-
제어 주파수: 최대 1 kHz CAN-FD 루프
-
소프트웨어 지원: ROS 프레임워크, Python API, C++ API
-
인체공학: 160–165 cm 신장에 적합한 팔 길이
소프트웨어 &및 오픈 소스 생태계
OpenArm는 완전한 오픈 소스 로봇 팔 플랫폼입니다.공식 리소스에는 다음이 포함됩니다:
-
웹사이트: openarm.dev
-
문서: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
튜토리얼 비디오: 시작을 위한 공식 YouTube 가이드
오픈 CAD, PCB 및 펌웨어 파일을 사용하여 기계, 전자 및 제어 소프트웨어를 수정하거나 새로운 센서 및 말단 장치를 추가하여 자신의 연구 주제를 확장할 수 있습니다.
전형적인 응용 시나리오
OpenArm은 다음을 위한 다목적 고정밀 연구 및 교육 플랫폼으로 설계되었습니다:
-
대학 로봇 공학 과정 및 실험실 실험
-
연구 기관 및 실험실 프로젝트
-
강화 학습 및 물리 기반 AI 연구
-
인간-로봇 상호작용 및 협업 로봇 연구
-
메이커 스페이스 및 오픈 소스 하드웨어 팀
-
공학 교육 및 훈련 플랫폼
인간 크기의 크기와 유연한 작동으로 OpenArm은 조작, 원격 조작, 모방 학습, 보조 로봇 공학 등 다양한 용도에 적합합니다.
제품 버전 &및 구성
버전 1 – DIY 하드웨어 키트
-
기계 구조를 깊이 이해하고자 하는 손재주가 뛰어난 사용자용입니다.
-
모든 기계, 전기 및 3D 프린트 부품이 포함되어 있으며, 매뉴얼을 따라 팔을 직접 조립하고 조정합니다.
버전 2 – 완성된 로봇 팔
-
플러그 앤 플레이 플랫폼이 필요한 연구 기관, 실험실, 기업 및 교육자를 위한 제품입니다.
-
배송 전에 완전히 조립되고 조정되며, 박스에서 꺼내자마자 사용할 준비가 되어 있습니다.
사용 가능한 팔 구성(목록에 따라 다름):
-
DIY 키트 – 단일 팔
-
완성된 팔 – 단일 팔
-
DIY 키트 – 이중 팔
-
완성된 팔 – 이중 팔
-
DIY 키트 – 쿼드 팔
-
완성된 팔 – 쿼드 팔
패키지 내용물
각 OpenArm 키트 또는 완성 시스템에는 일반적으로 다음이 포함됩니다:
-
알루미늄 합금 및 스테인리스 스틸 주요 구조 부품
-
모터, 드라이버 보드, 전원 공급 장치 및 케이블
-
3D 프린트 부품 및 나사 세트
듀얼 암 및 쿼드 암 버전: 공식 BOM 호환 USB2CANFD-X2 장치 (CEREBOTO는 공인 국내 대리점) PC와 CAN-FD 통신을 위한 것입니다.
지원되는 하드웨어 확장
OpenArm은 여러 하드웨어 추가 장치(별도 판매)를 지원하여 완전한 로봇 시스템을 구축할 수 있습니다:
-
정교한 로봇 손 – 정밀 조작 및 그립 연구를 위한 것입니다.
-
모션 캡처 장갑 세트 – 직관적인 원격 조작 및 모방 학습을 위한 것입니다.
-
모바일 베이스 – OpenArm을 모바일 조작 플랫폼으로 전환합니다.
자주 묻는 질문(FAQ)
Q: 로봇 팔을 즉시 사용할 수 있나요?
A: 완성된 팔 버전은 공장에서 완전히 조정되고 보정되어 있습니다—전원을 켜고 작업을 시작하세요. DIY 하드웨어 키트는 지침에 따라 시스템을 조립하고 설정해야 합니다.
Q: OpenArm은 ROS 또는 다른 미들웨어와 호환됩니까?
A: 예. OpenArm은 공식적으로 ROS 프레임워크를 지원하며, Python 및 C++ API를 통해 팔을 제어할 수도 있습니다.
Q: 이 제품은 누구를 위한 것입니까?
A: 대학 및 연구소 연구자, AI &및 로봇 공학 실험실, 교육 과정, 엔지니어링 훈련 센터, 그리고 고급 취미자들입니다.
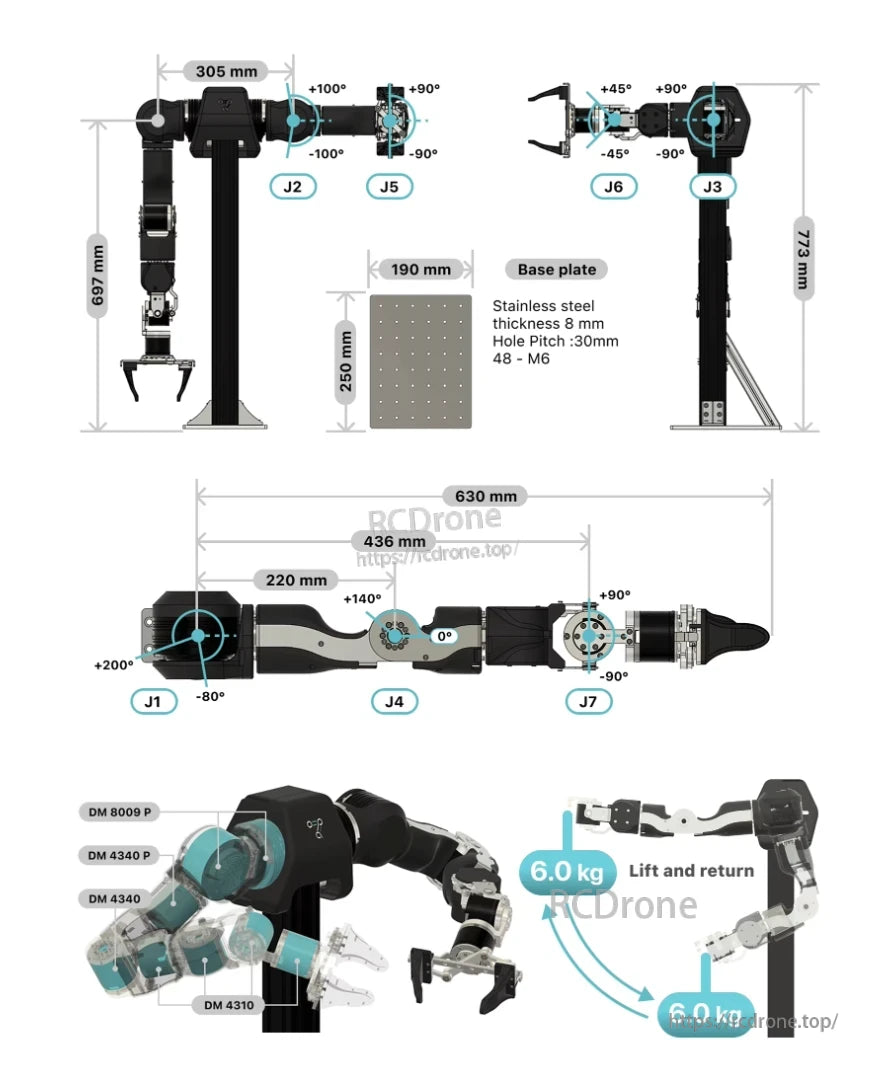
Cereboto OpenArm 7DOF 로봇 팔은 정의된 각도 범위를 가진 7개의 관절(J1–J7)을 가지고 있습니다. 높이는 697 mm 또는 773 mm이며, 도달 거리는 630 mm이고, 190×250 mm 스테인리스 스틸 베이스 플레이트에 장착됩니다—두께 8 mm, 30 mm 간격으로 배치된 48개의 M6 구멍이 있습니다. DM8009P, DM4340P, DM4340 및 DM4310 모터에 의해 구동되며, 6.0 kg의 하중을 정밀하게 처리합니다. 산업 및 연구 용도로 설계되었으며, 구조적 견고성과 정확한 모션 제어의 균형을 이룹니다.

Related Collections



