



CUAV NEO 4 SE GPS 모듈(u-blox MIA-M10Q(M10) GNSS, DroneCAN, ST IIS2MDC 나침반)
CUAV NEO 4 SE GPS 모듈(u-blox MIA-M10Q(M10) GNSS, DroneCAN, ST IIS2MDC 나침반)
CUAV
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CUAV NEO 4 SE는 다중 GNSS 위치 결정 및 DroneCAN 통신을 위해 설계된 u-blox M10 수신기 시스템 기반의 GPS 모듈(GNSS 모듈)입니다. BeiDou, Galileo, GLONASS 및 GPS/QZSS 시스템을 지원하며 전자 나침반과 RGB 상태 조명을 통합하고 있습니다.
주요 특징
- 수신기: u-blox MIA-M10Q (u-blox M10 위성 수신기 시스템); 네 개의 GNSS 동시 지원 (BeiDou, Galileo, GLONASS, GPS/QZSS)
- 정밀 위치 결정 설계: 이중 SAW + LNA 통합; 모듈 설계에 TCXO 포함
- 프로세서: STM32H5 Arm Cortex-M33, 최대 250 MHz; 자체 개발한 M4C 아키텍처 소프트웨어
- 내장 ST IIS2MDC 전자 나침반 (자기장 동적 범위 최대 ±50 Gs; 온도 오프셋 보상 기능)
- DroneCAN 프로토콜; ArduPilot 및 PX4 오픈 소스 플랫폼 프로토콜 스택과의 호환성 명시
- 다기능 RGB 상태 표시등: 8채널 버스 RGB 조명 그룹; 내장 버저와 연결됨; 컨트롤러 해제 스위치, 배터리 수준, 위치 결정 및 결함 상태 표시 지원
고객 서비스 및 기술 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/를 방문하십시오.
사양
| 제품 | CUAV NEO 4 SE GPS 모듈 (GNSS 모듈) |
| 수신기 유형 | u-blox MIA-M10Q |
| 프로세서 | STM32H5 Arm Cortex-M33 250 MHz |
| 주파수 대역 | GPS: L1 C/A GLONASS: L10F BeiDou: B11/B1C Galileo: E1B/C QZSS: L1 C/A L1S SBAS L1 C/A: WAAS / EGNOS / MSAS / GAGAN |
| 동시 GNSS 수 | BeiDou / Galileo / GLONASS / GPS / QZSS (네 개의 GNSS를 동시에 지원) |
| 발진기 | TCXO |
| 획득 | 콜드 스타트: 27 초 핫 스타트: 1 초 보조 스타트: 1 초 |
| 내비게이션업데이트 속도 | 최대 10 Hz (4개의 동시 GNSS) 최대 25 Hz (단일 GNSS) |
| 수평 위치 정확도 | 1.5 m CEP |
| 신호 무결성 | RF 간섭 감지 및 보고; 신호 이상 감지 및 보고 |
| 프로토콜 | DroneCAN |
| 펌웨어 업그레이드 | 지원 |
| 펌웨어 | CUAV M4C GNSS |
| 펌웨어 실행 | CUAV M4C PMU2 |
| 데이터 인터페이스 | JST GH 1.25 4P |
| 입력 전압 | 4.7에서 5.2 V |
| 작동 온도 | -10에서 80°C |
| 크기 (사양) | 60 x 60 x 16.1 mm |
| 무게 (사양) | 33 g |
| 크기 도면 (NEO 4 SE 크기) | 60 mm; 16.1 mm; 79 mm; 2 mm; 12 mm |
| 무게 (리스트) | 0.5 kg |
| 치수 (리스트) | 10 x 10 x 5 cm |
| 제품 변형 | MIA-M10Q |
포함된 항목
- NEO 4 SE x 1
- CAN 케이블 (35 cm) x 1
- GPS 스탠드 x 1
- 3M 양면 테이프 x 1
- 고정 나사 x 2
응용 프로그램
- ArduPilot 및 PX4 프로토콜 스택을 사용하는 시스템을 위한 DroneCAN GNSS 위치 지정 (명시된 대로)
세부 사항
NEO 4 SE GNSS 모듈은 u-blox M10 수신기, 자체 개발한 M4C 소프트웨어 및 DroneCAN 프로토콜을 통합합니다. 내장된 ST IIS2MDC 나침반, RGB 상태 표시등 및 ArduPilot 및 PX4 오픈 소스 플랫폼과의 호환성을 특징으로 합니다.높은 유연성과 안전성을 위해 설계된 NEO 4 SE는 정밀한 위치 지정과 원활한 통합을 제공하여 동적 환경에서 신뢰할 수 있고 정확한 성능을 요구하는 고급 드론 내비게이션 시스템에 적합합니다.
NEO 4 SE는 네 가지 GNSS를 지원합니다: BeiDou, Galileo, GLONASS, GPS/QZSS. 도시 협곡과 같은 어려운 지역에서 더 나은 위치 정확성을 위해 신호를 최적화합니다. u-blox M10 위성 수신기 시스템의 일부입니다.
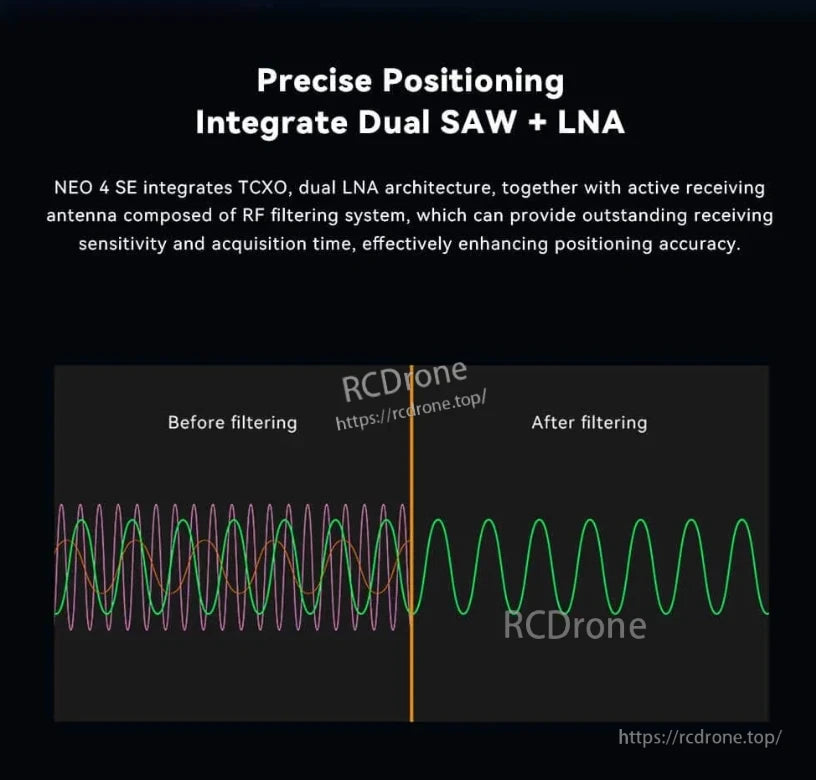
NEO 4 SE GPS는 TCXO, 이중 LNA 및 RF 필터링을 사용하여 감도를 향상시키고, 더 빠른 수신 및 정밀한 위치 지정을 제공합니다. 시각 자료는 필터링 전후의 신호 선명도를 비교합니다.
최대 250 MHz의 Cortex-M33 CPU를 갖춘 고성능 STM32H5 프로세서. 효율적인 사용자 맞춤화 및 업그레이드를 위해 CUAV의 유연한 M4C 소프트웨어를 실행합니다.
NEO 4 SE는 ±50 Gs 자기 범위, 온도 보상 및 유사 제품에 비해 우수한 간섭 방지 성능을 갖춘 ST IIS2MDC 전자 나침반을 통합합니다.
NEO 4 SE는 DroneCAN 프로토콜을 사용하며, ArduPilot 및 PX4와 호환됩니다. 드론 시스템 통합을 위한 광범위한 응용 프로그램, 확장성 및 유연성을 제공합니다.
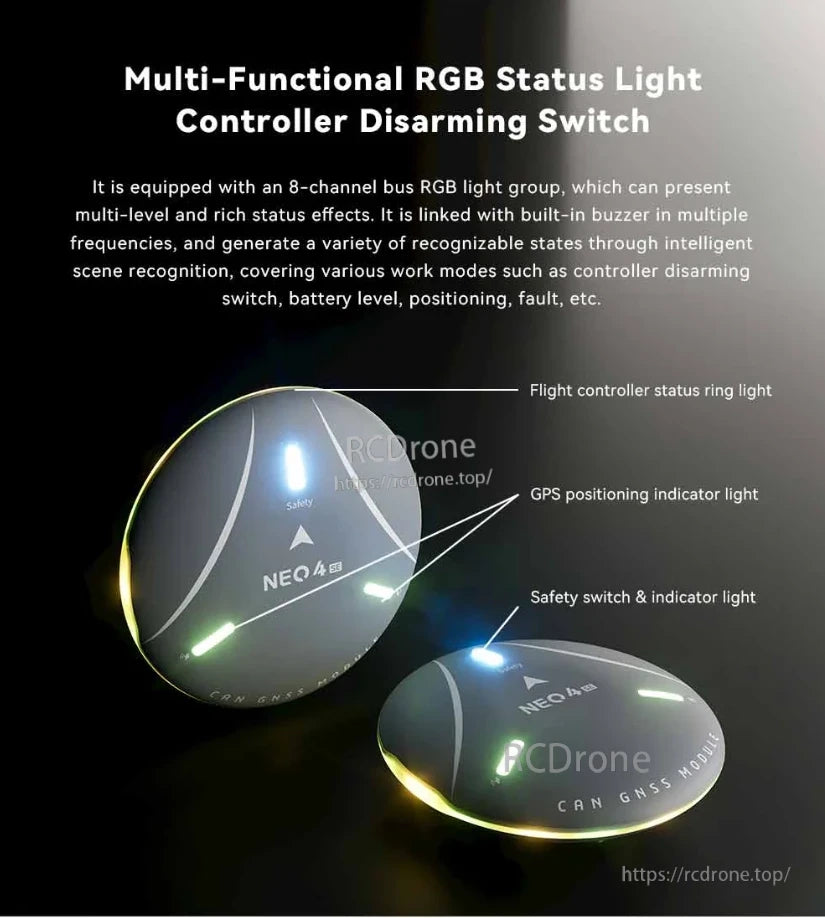
다기능 RGB 상태등 컨트롤러 해제 스위치로 8채널 버스, 지능형 장면 인식 및 비행 모드, 배터리, 위치, 결함 경고를 위한 내장 버저가 장착되어 있으며 NEO 4 SE의 조명 표시기로 알림을 제공합니다.
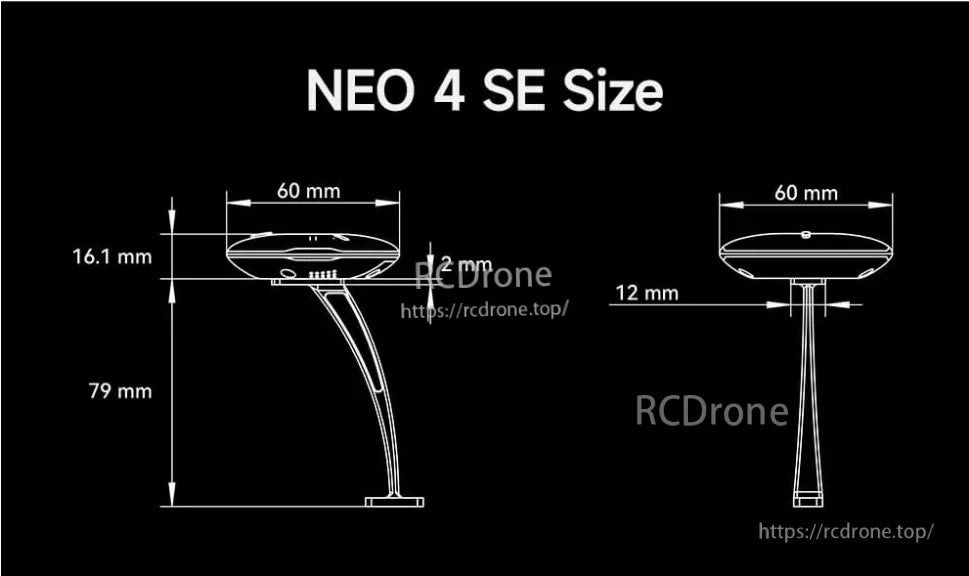
NEO 4 SE 크기 치수: 직경 60mm, 높이 79mm, 본체 16.1mm, 두께 2mm, 베이스 너비 12mm. GPS 장치의 기술 도면입니다.
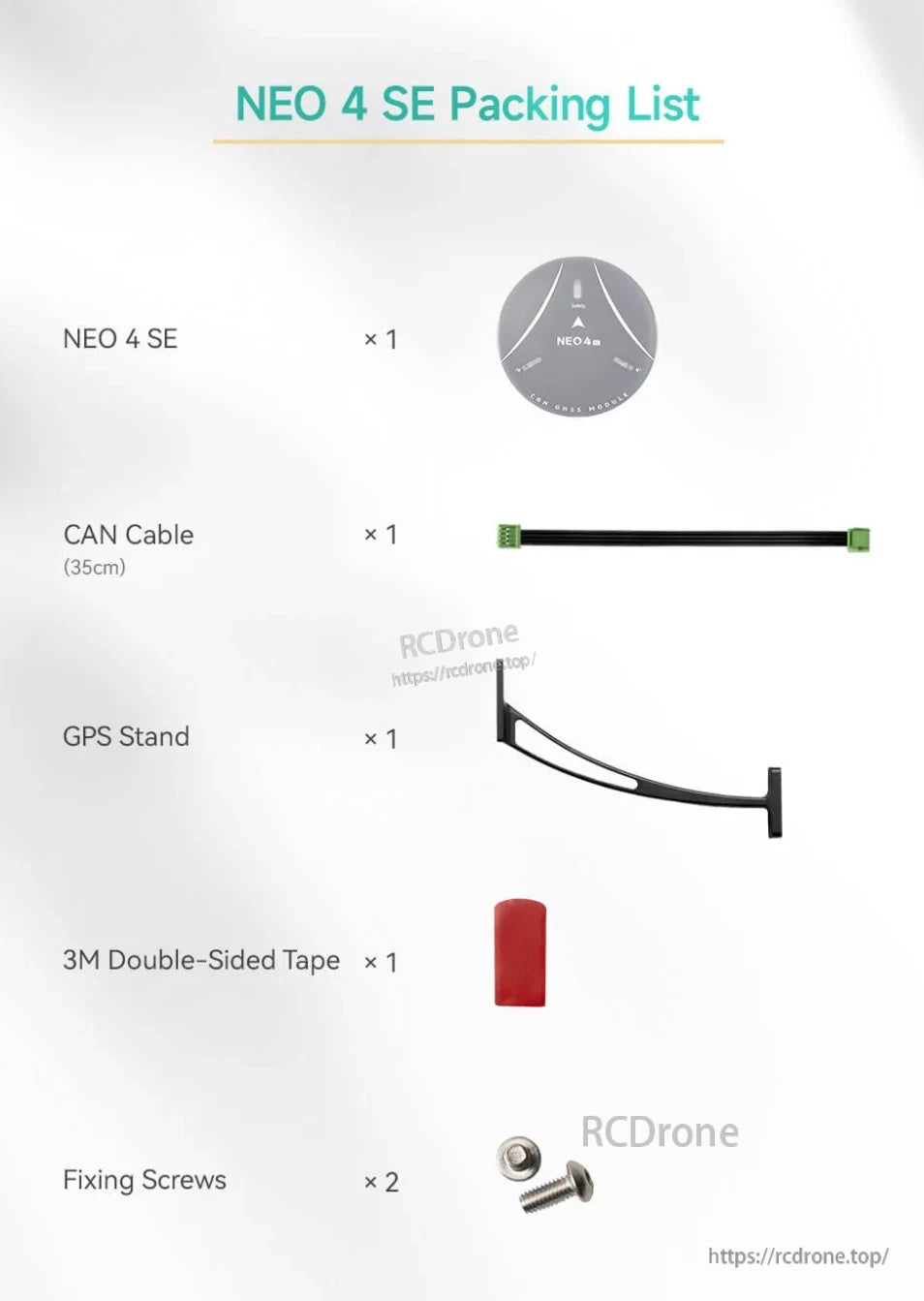
NEO 4 SE 포장 목록에는 장치, CAN 케이블, GPS 스탠드, 양면 테이프 및 설치를 위한 두 개의 고정 나사가 포함됩니다.
Related Collections



