






CUAV Pixhawk V6X V2 드론 컨트롤러 (PX4 ArduPilot용), STM32H753IIK6, RM3100, 100Mbps 이더넷
CUAV Pixhawk V6X V2 드론 컨트롤러 (PX4 ArduPilot용), STM32H753IIK6, RM3100, 100Mbps 이더넷
CUAV
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CUAV Pixhawk V6X V2는 PX4 및 ArduPilot 자율 비행 소프트웨어를 위해 설계된 Pixhawk 시리즈 드론 컨트롤러 입니다. 이 제품은 Pixhawk FMU v6x 표준 및 모듈형 설계 철학을 따르며, 업그레이드된 산업용 이중 감지, 일정 온도의 외부 클락 및 MCU 열 방출 설계, 5V/3.3V PWM 레벨 전환, 그리고 특허받은 충격 흡수 구조를 특징으로 합니다. 표준 PMU 2 Lite 전원 관리 모듈은 70V 입력 및 220A 전류 감지를 지원합니다.
주요 특징
- H7 이중 정밀 부동 소수점 유닛 (STM32H753IIK6); 480MHz 이중 정밀 부동 소수점 유닛; 2M 플래시 메모리
- 산업용 등급의 이질 삼중 중복 IMU 매트릭스, 독립 버스 및 전원 공급 설계 (IIM-42652, BMI088, ICM-45686)
- 결합된 이중 중복 기압계 (BMP581, ICP-20100)
- 3축(X, Y, Z) 충격 흡수 시스템; 기울어진 사각형 지지 설계; 새로운 유형의 충격 흡수 재료
- 강력한 자기 간섭 제거를 위한 자동차 등급 RM3100 자기 나침반
- IMU 외부 크리스탈 클락 보상 (고정밀 상온 외부 클락과 함께 사용하여 ODR 오류를 줄이고 감도 및 동기화를 개선)
- 상온 제어 시스템: 열 전도성 실리콘 및 IMU 온도 보상으로 온도 관련 드리프트 감소
- 5V와 3V 간의 유연한 소프트웨어 전환.3V PWM 출력 수준
- 미션 컴퓨터 및 측량 카메라와 같은 장치와의 고속 데이터 동기화를 위한 통합 100 Mbps 이더넷 인터페이스
- 보안 부팅 및 보안 펌웨어 업데이트 서비스 지원
- 다중 중복 전원 공급 설계; 2채널 CAN PMU 입력 지원; PMU 2 Lite를 표준으로 포함
- 직접 나사 장착을 위한 하단 장착 홀 추가; M2 표준 나사와 호환되는 장착 홀
사양
| 프로세서 | STM32H753IIK6 |
| 코프로세서 | STM32F103 |
| 버전 | Pixhawk V6XV2 |
| CPU / 메모리 (명시됨) | 480MHz 배정밀도 부동 소수점 유닛; 2M 플래시 메모리 |
| 가속도계 & 자이로스코프 | IIM-42652; BMI088; ICM-45686 |
| 나침반 | RM3100 |
| 기압계 | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM 레벨 | 3.3V / 5V (소프트웨어 스위칭) |
| 전원 | 2 (2 CAN 전원 인터페이스) |
| GPS 포트 | 2 (GPS1: I2C 및 안전 스위치가 있는 GPS 인터페이스; GPS2: I2C 및 GPS가 있는 인터페이스) |
| TELEM 포트 | 3 |
| CAN 버스 | 2 |
| PPM RC | 1 (PPM 수신기를 위한 전용 입력) |
| SBUS/DSM/RSSI | 2 (1 SBUS/DSM/Spektrum 입력; 1 아날로그 3.3V/PWM 입력) |
| SBUS 출력 | 1 |
| FMU 디버그 | 1 |
| IO 디버그 | 1 |
| 이더넷 | 1 (100 Mbps) |
| SPI 외부 1 | 1 (외부 센서 확장을 위한 SP16 인터페이스) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB 포트 | 2 (Type-C x1; USB 외부 연결을 위한 GH 인터페이스 x1) |
| TF 카드 | 1 |
| 전원 모듈 | 표준 PMU 2 Lite (5V 버전), 입력 전압: 12-70V |
| 작동 전압 | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; 전원: 4.85-5.45V |
| 작동 온도 | -20에서 85C까지 |
| 크기 | 45 x 85.1 x 29.2 mm |
| 무게 | 컨트롤러: 97.9g; 코어: 43.1g; 캐리어 보드(나사 포함): 54.8g |
| 장착 참고(도면 텍스트) | M2 표준 나사와 호환되는 장착 홀; 표시된 치수: 72 mm; 22.50 mm; 24 mm |
포함된 항목
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V 전원 모듈 x1
- PMU 2 Lite-5V 헤더 전원 케이블 (X7+ (V6X) 버전), 케이블 길이: 25cm x1
- CAN/I2C 확장 보드 x1
- TF 메모리 카드 x1
- Type-C 케이블, 케이블 길이: 100cm x1
- DSM RC 케이블, 케이블 길이: 30cm x1
- SBUS RC 케이블, 케이블 길이: 30cm x1
- PPM RC/SBUS OUT 케이블, 케이블 길이: 30cm x1
- 이더넷 케이블, 케이블 길이: 40cm x1
- CAN 케이블, 케이블 길이: 30cm x1
- TELEM 케이블, 케이블 길이: 30cm x1
- UART 4 케이블, 케이블 길이: 30cm x1
- UART4 -> I2C 케이블, 케이블 길이: 30cm x1
- ADIO 케이블, 케이블 길이: 30cm x1
- 디버그 케이블, 케이블 길이: 10cm x1
- USB -> Type-C 여성 커넥터 연장 케이블, 케이블 길이: 50cm x1
- 3M 양면 테이프 x2
응용 프로그램
- ArduPilot 및 PX4와 호환
- 다중 회전익, 고정익, VTOL 고정익, 무인 헬리콥터, 무인 차량 및 무인 선박(잠수함)을 지원합니다.
- 지원되는 경우 미션 컴퓨터 및 기타 온보드 장치와의 고속 이더넷 데이터 동기화
호환성 확인 및 설정 질문은 [email protected]에 문의하거나 https://rcdrone.top/. 를 방문하십시오.
비디오
상세정보

Pixhawk V6X V2 비행 컨트롤러는 H7 프로세서를 사용하며, 삼중 중복 IMU, 이중 기압계 및 충격 흡수 설계를 갖춘 RM3100 나침반을 포함합니다.

Pixhawk V6X V2는 STM32H753IIK6 H7 프로세서를 사용하여 PX4 및 ArduPilot 기반 비행 제어 설정을 지원합니다.

Pixhawk V6X V2는 진동과 소음을 줄이기 위해 네 개의 기울어진 코너 지지대가 있는 3축(X, Y, Z) 충격 흡수 마운트를 사용합니다.
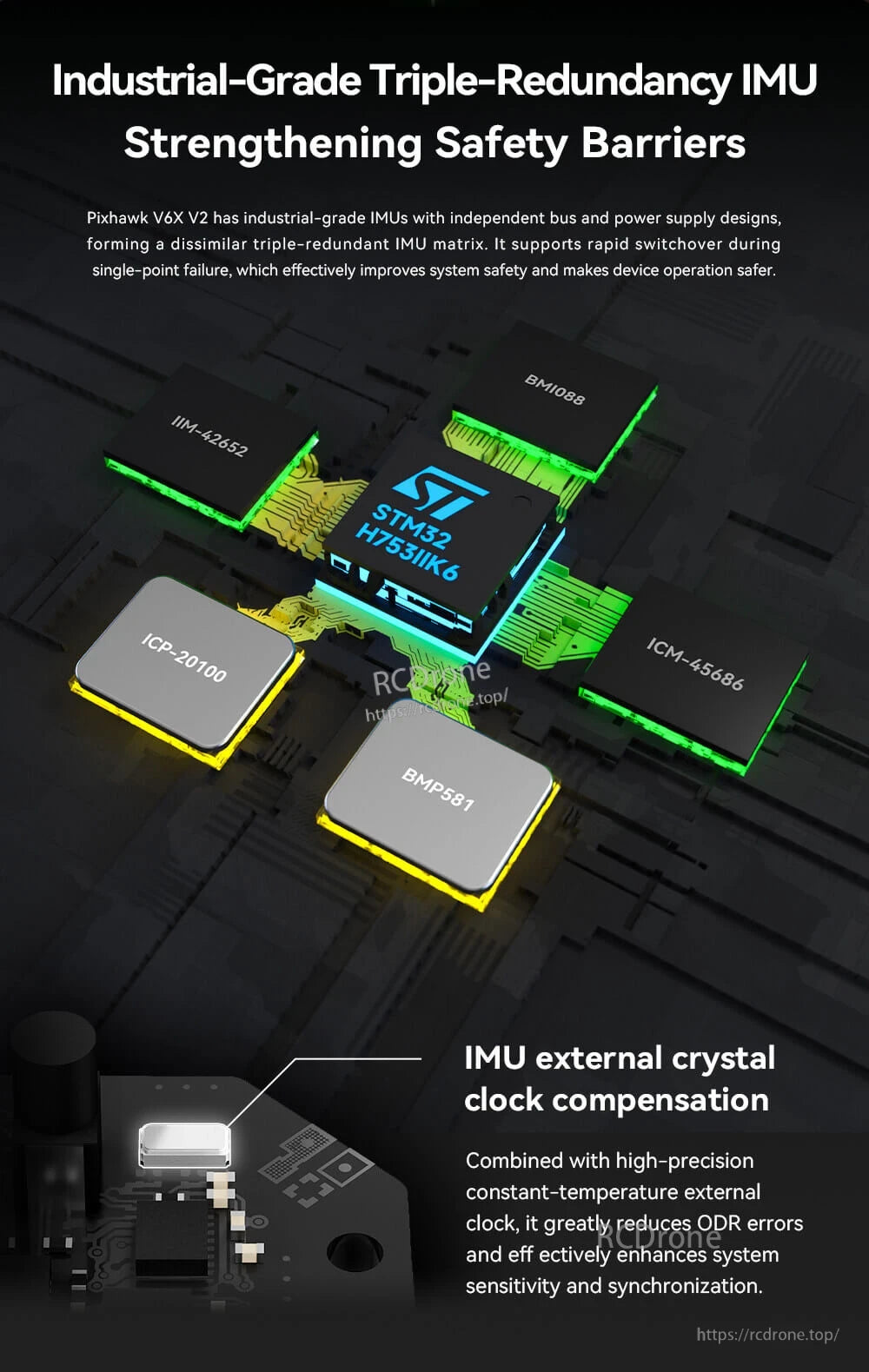
Pixhawk V6X V2 비행 컨트롤러 설계는 STM32H753IIK6 주위에 삼중 중복 IMU 설정을 특징으로 하며, 센서 타이밍을 위한 외부 크리스탈 클락 보상을 포함합니다.

Pixhawk V6X V2는 자동차 등급의 RM3100 자기계를 통합하고 GPS 방향 결정을 지원하여 보다 안정적인 방향 및 내비게이션을 제공합니다.
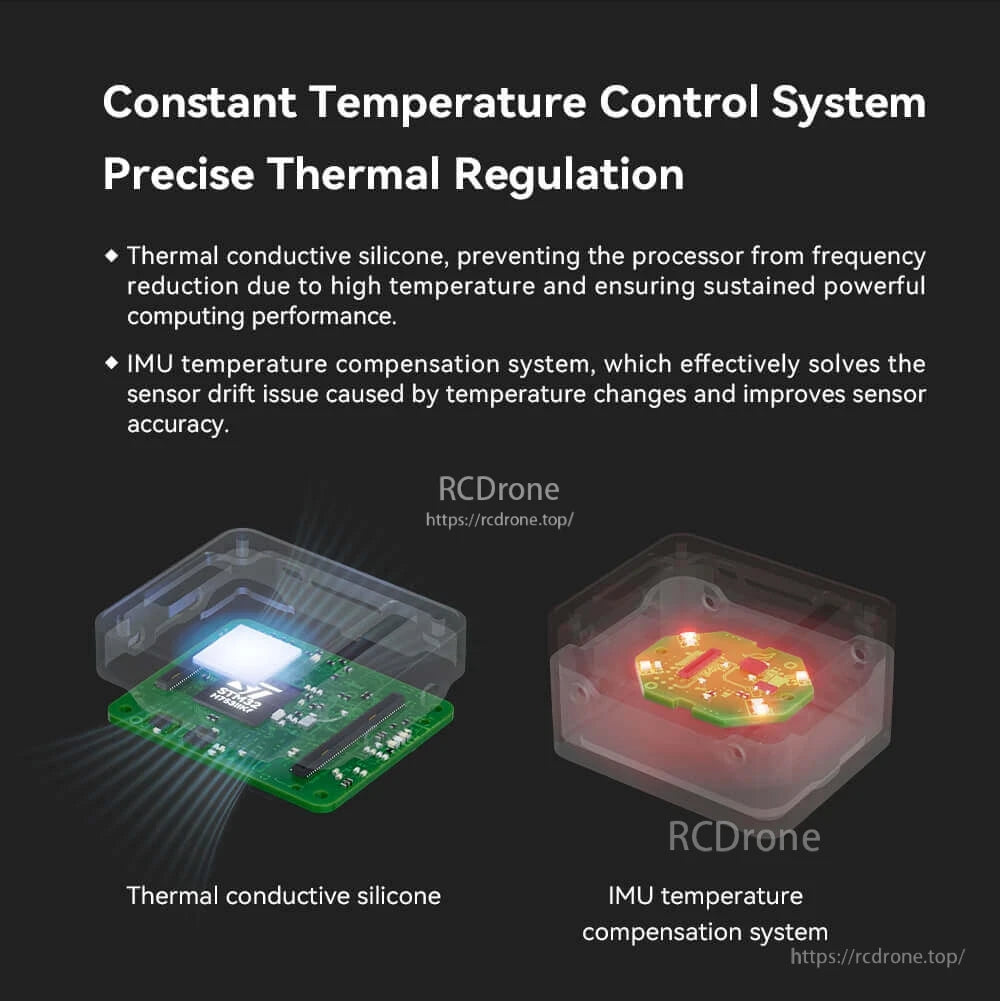
상온 제어 시스템은 열 전도 실리콘과 IMU 온도 보정을 사용하여 온도 관련 드리프트를 줄입니다.
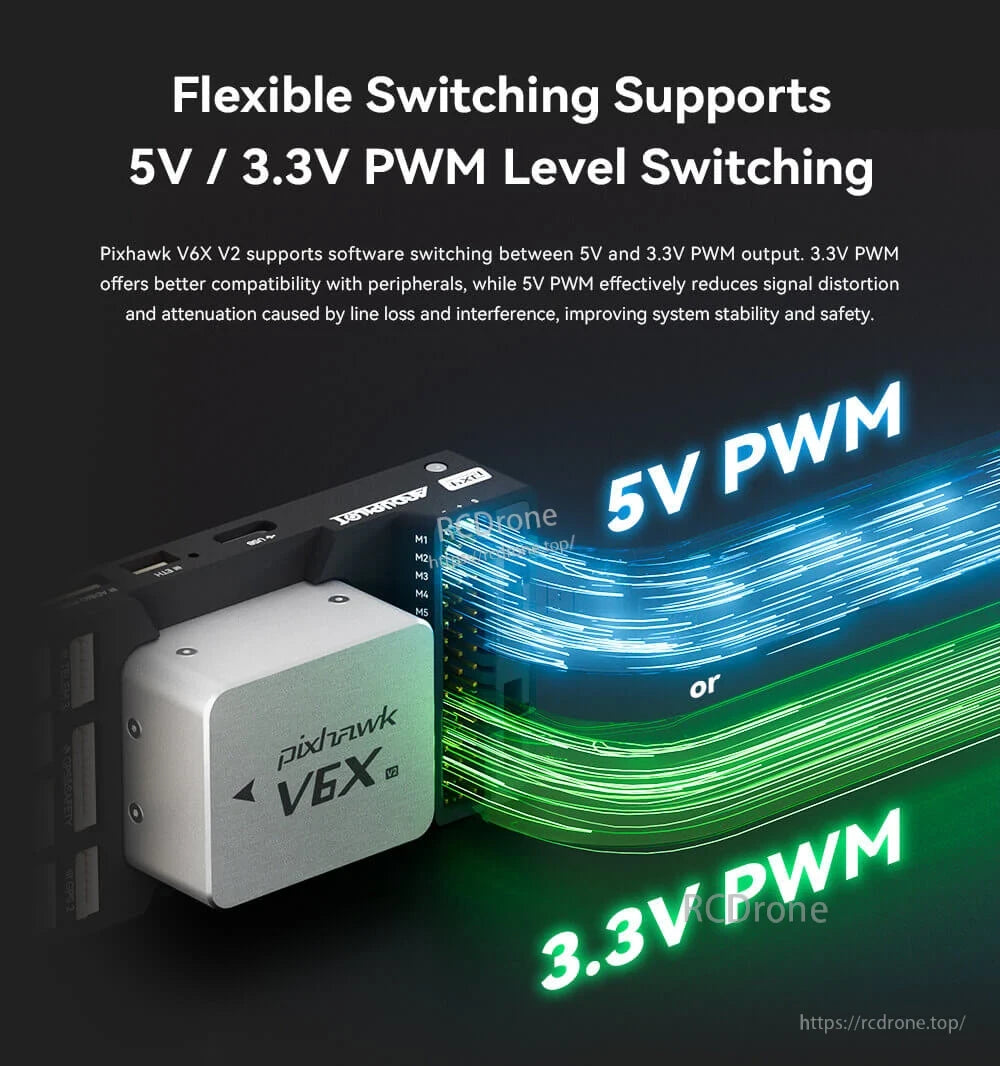
Pixhawk V6X V2는 다양한 주변 장치와의 호환성을 쉽게 하기 위해 5V와 3.3V PWM 출력 수준 간의 유연한 전환을 지원합니다.

Pixhawk V6X V2는 USB, TELEM3, CAN 및 GPS와 같은 레이블이 붙은 포트와 함께 100 Mbps 이더넷 인터페이스를 통합하여 & 깔끔한 배선을 위한 안전성을 제공합니다.
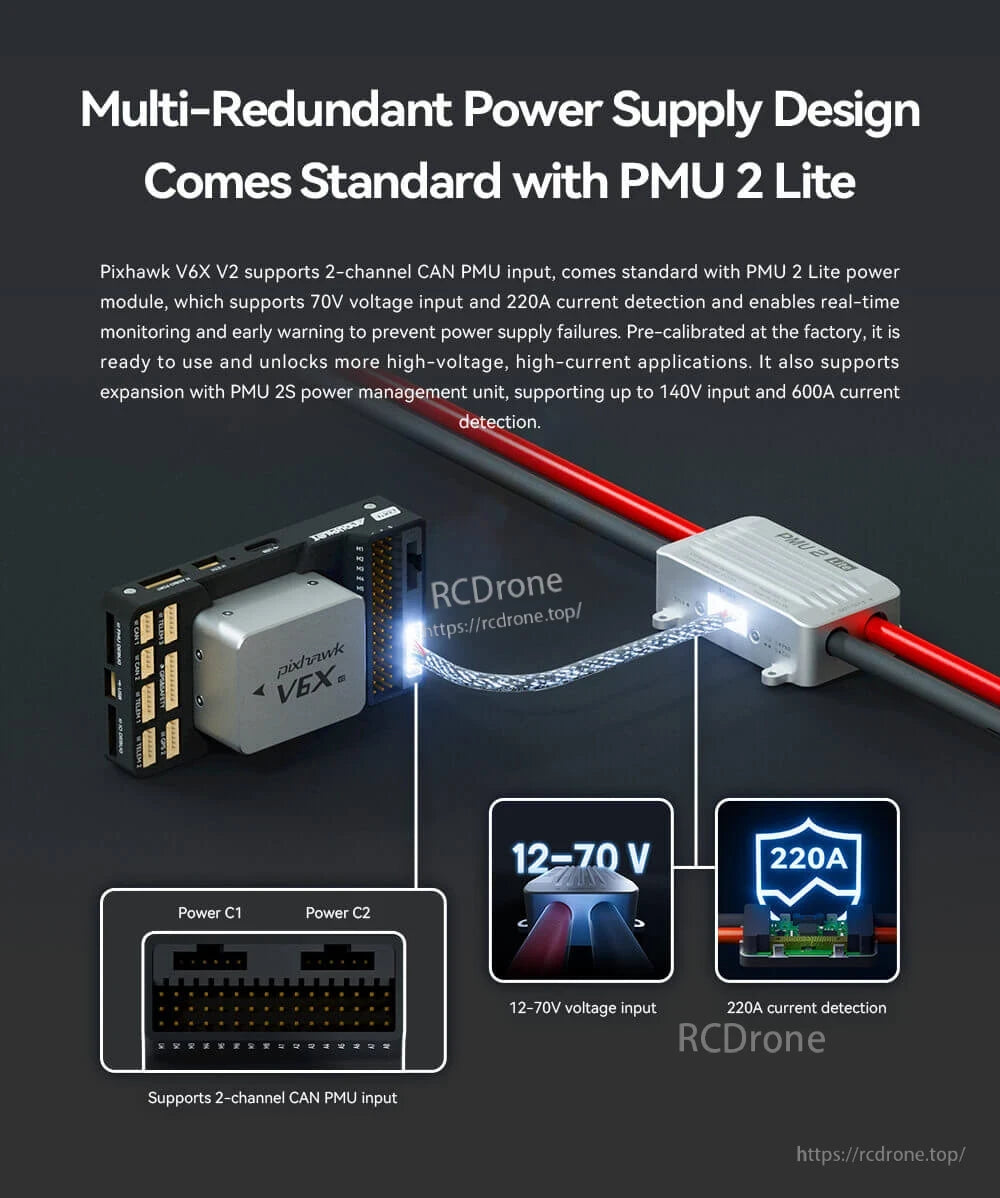
Pixhawk V6X V2는 PMU 2 Lite 모듈과 결합하여 다중 중복 전원 입력을 지원하며, 12–70V 및 220A 전류 감지를 지원합니다.

CUAV Pixhawk V6X V2는 커스터마이징 및 커넥터 접근을 간소화하기 위해 캐리어 보드에 모듈식, 분리 가능한 코어 모듈을 사용합니다.
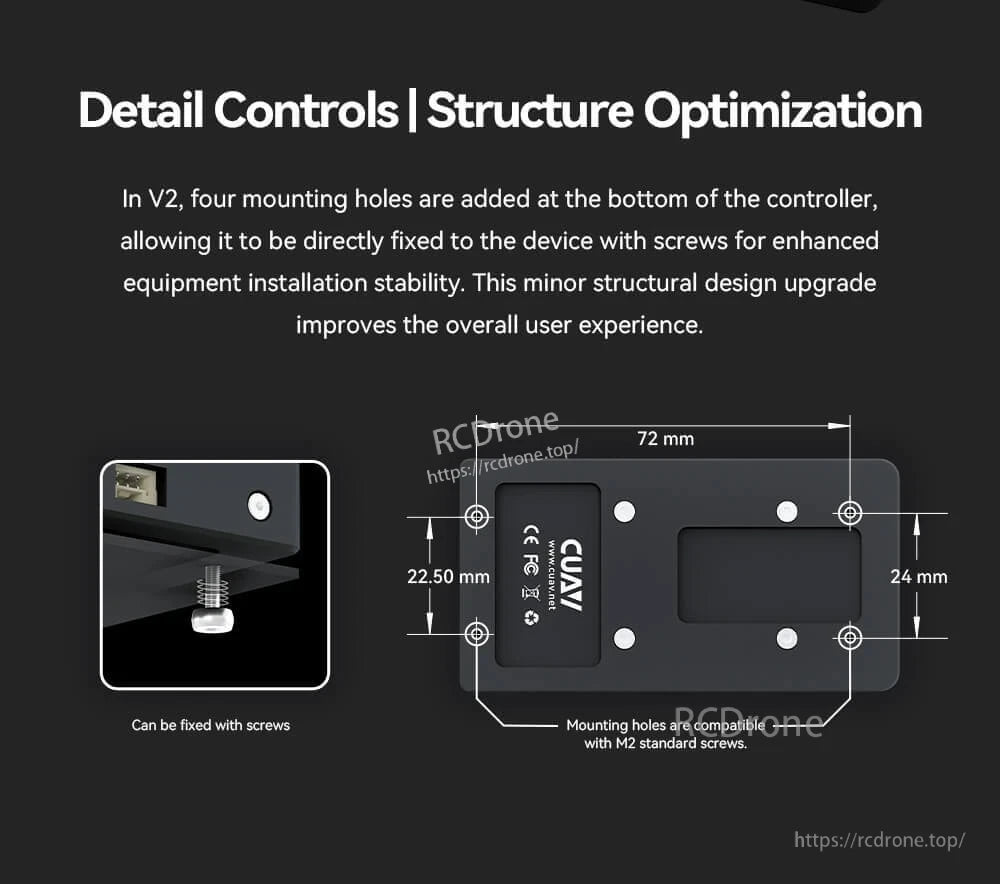
CUAV Pixhawk V6X V2는 보다 안전한 나사 고정을 위한 72 mm 풋프린트의 M2 호환 바닥 장착 구멍 4개를 추가합니다.

Pixhawk V6X V2는 다중 로터, 고정익 항공기, 지상 또는 해양 차량을 포함한 다양한 무인 플랫폼을 위한 ArduPilot 및 PX4 펌웨어를 지원합니다.
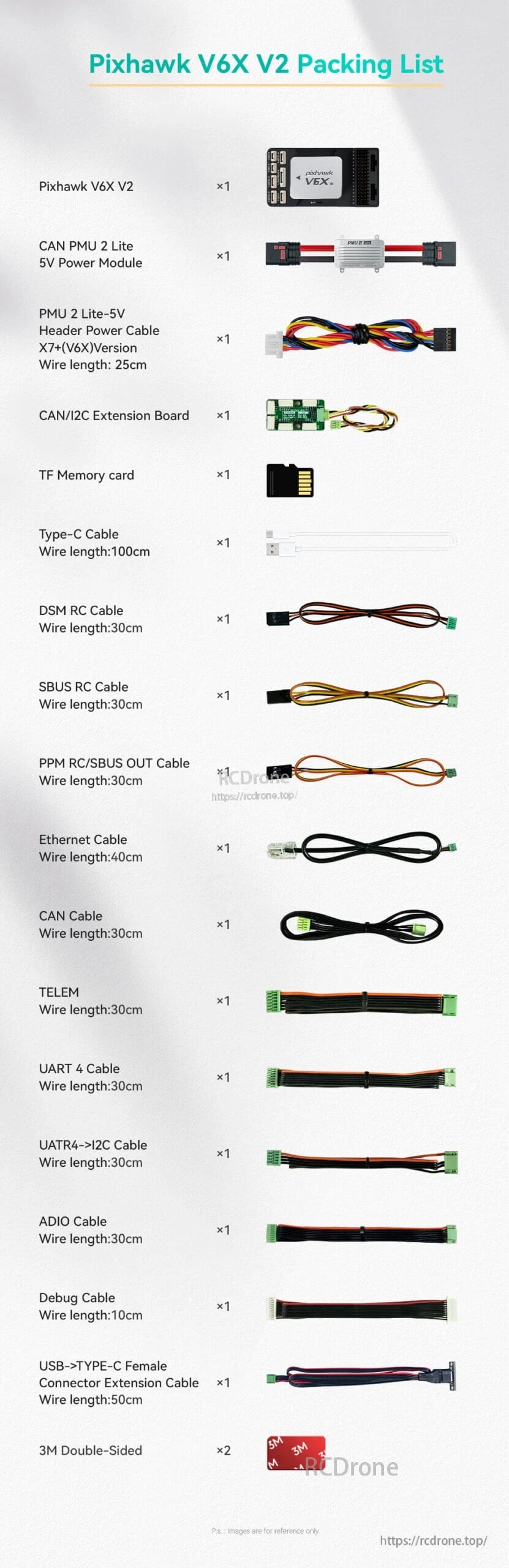
Pixhawk V6X V2 키트에는 비행 컨트롤러, CAN PMU 2 Lite 5V 전원 모듈, TF 메모리 카드, Type‑C, RC, 이더넷, CAN, TELEM, UART, ADIO 및 디버그 케이블 세트가 포함되어 있습니다.
Related Collections


















