






CUAV X7 Plus 비행 컨트롤러 - APM PX4 Pixhawk FPV 고정익 RC UAV Drone Quadcopter용 오픈 소스
CUAV X7 Plus 비행 컨트롤러 - APM PX4 Pixhawk FPV 고정익 RC UAV Drone Quadcopter용 오픈 소스
CUAV
픽업 사용 가능 여부를 로드할 수 없습니다.
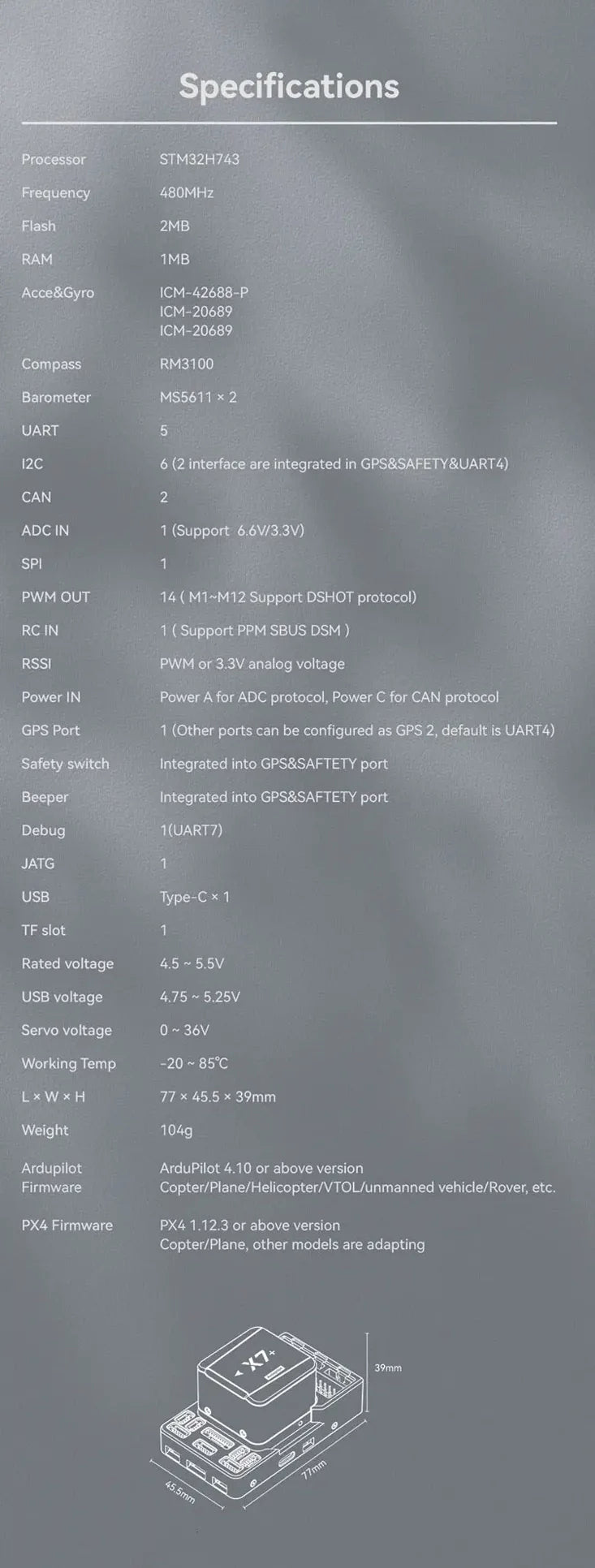
CUAV X7 Plus 사양
- 인터페이스:
- 2개의 전원 포트(전원 A는 공통 ADC 인터페이스, 전원 C는 uavcan 배터리 인터페이스)
- 다중 RC 입력 지원(SBU/CPPM/DSM)
- PWM 출력 14개(12개는 Dshot 지원)
- i2c 버스 4개(i2c 전용 포트 2개)
- GPS 포트 2개(GPS 및 UART4 포트)
- 아날로그 / PWM RSSI 입력
- CAN 버스 포트 2개
- ADC 입력 2개
- USB 포트 1개
- 온보드 센서:
- 가속도계/자이로스코프: ICM-20689
- 가속도계/자이로스코프: ICM-20649
- 가속도계/자이로스코프: BMI088
- 자력계: RM3100
- 기압계: MS5611*2
- 작동 온도: -20 ~ 80°C
- 주요 FMU 프로세서: STM32H743
- 전원 시스템:
- 서보 레일 입력: 0~36V
- USB 입력: 4.75~5.25V
- 전원: 4.3~5.4V
- 무게: 101g
포함
- 1x CUAV X7+ 표준 자동 조종 장치 비행 컨트롤러(PX4/APM용)
- 1x CAN PMU Lite 전원 모듈
- 1z CAN 확장 보드
- 16G 메모리 카드 1개
- 1x 12C / CAN 케이블
- 1x Pw-링크 모듈
- 1x ADC3.23 케이블
- 1x USB-C 케이블
- 1x RSSI 케이블
CUAV X7 Plus 비행 컨트롤러 사양
휠베이스: 나사
부품/액세서리 업그레이드: 휠 허브
도구 용품: 절단
기술적 매개변수: 값 3
크기: 77x45x39
원격 제어 주변기기/장치: 모터
권장 연령: 18세 이상
RC 부품 및 액세서리: 축
수량: 1개
원산지: 중국 본토
모델 번호: X7 Plus 비행 컨트롤러
재료: 금속
사륜구동 속성: 모터
차량 유형: 비행기
APM PX4 Pixhawk FPV RC Drone Quadcopter X7 버전용 CUAV 비행 컨트롤러 오픈 소스
X7 AND의 주요 차이점 X7PLUS:
1.전망은 다름,
2.센서가 다릅니다
X7 설명은 다음과 같습니다.
CUAV X7 + 비행 컨트롤러 설명
X7+ 비행 컨트롤러는 강력한 STM32H743 프로세서, ICM-42688-P 가속도계 및 자이로스코프, 비행 제어 시스템의 탁월한 탐색 및 안정성을 위한 RM3100 산업용 나침반을 갖춘 새로운 센서 라인업으로 향상되었습니다.

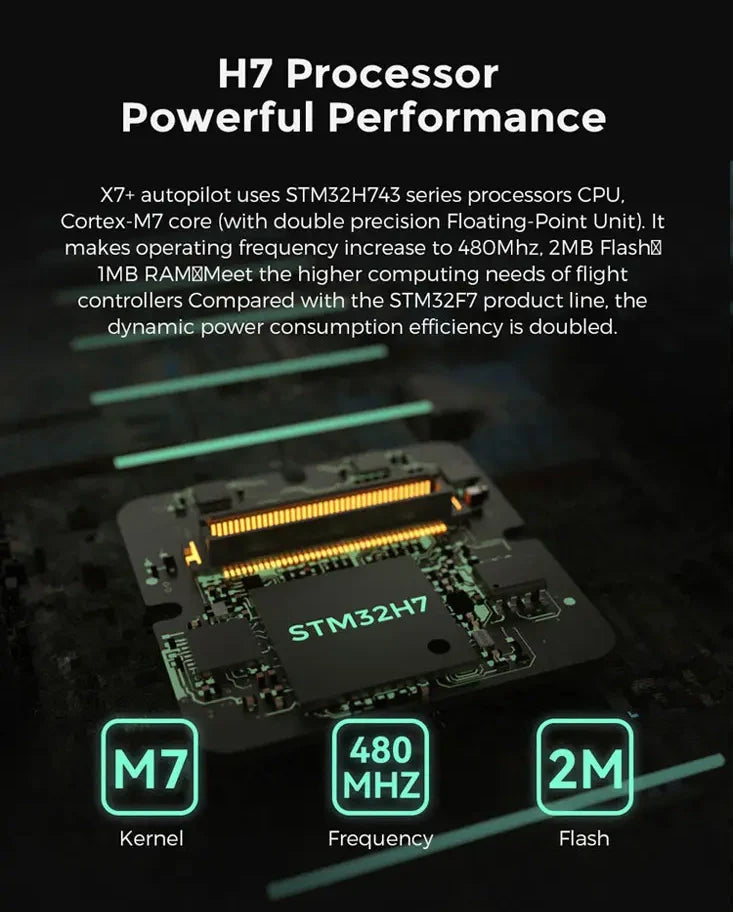
H7 프로세서 강력한 성능
X7+ 자동 조종 장치는 이중 정밀도 부동 소수점 장치(FPU)가 장착된 Cortex-M7 코어를 특징으로 하는 STM32H743 시리즈 프로세서를 활용하여 작동 주파수를 인상적인 480MHz로 향상시킵니다. 2MB 플래시와 1MB RAM을 갖춘 이 제품은 고급 비행 컨트롤러의 까다로운 컴퓨팅 요구 사항을 충족합니다. STM32F7 라인에 비해 STM32H7은 두 배의 동적 전력 소비 효율성을 제공하여 복잡한 비행 작업을 위한 강력한 성능을 보장합니다.
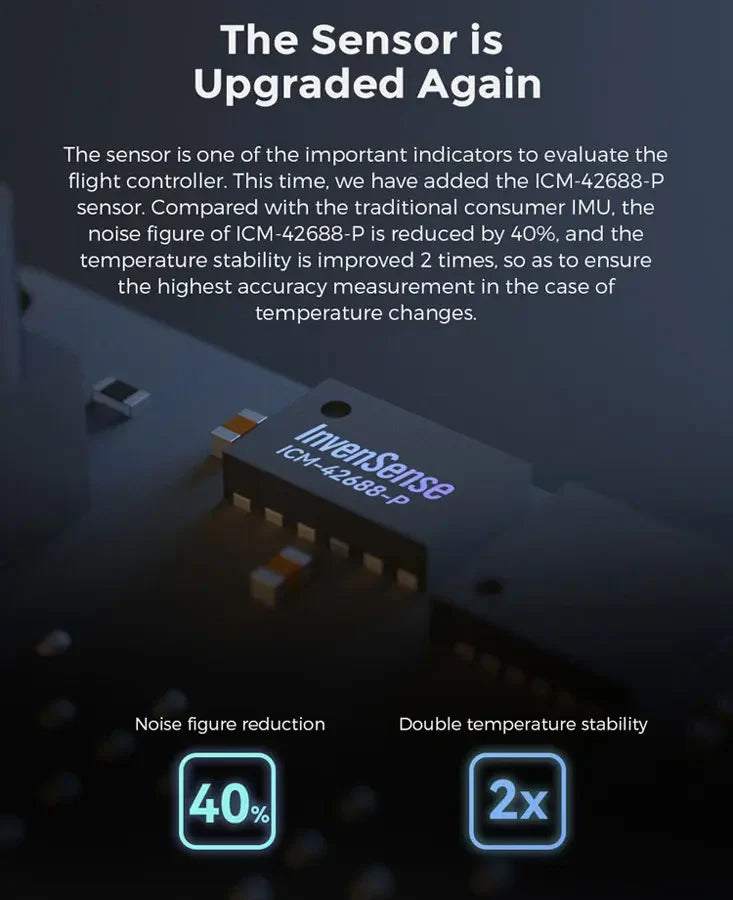
비행 컨트롤러의 센서 제품군은 ICM-42688-P 센서를 추가하여 크게 업그레이드되었습니다. 이번 업그레이드는 잡음 지수가 40% 감소하고 온도 안정성이 두 배로 높아져 기존 소비자 IMU에 비해 크게 개선되었습니다. 이러한 향상된 기능을 통해 비행 컨트롤러는 온도 변화 속에서도 최고의 측정 정확도를 유지할 수 있으며, 다양한 환경 조건에서 신뢰성과 성능에 대한 약속을 강조합니다.
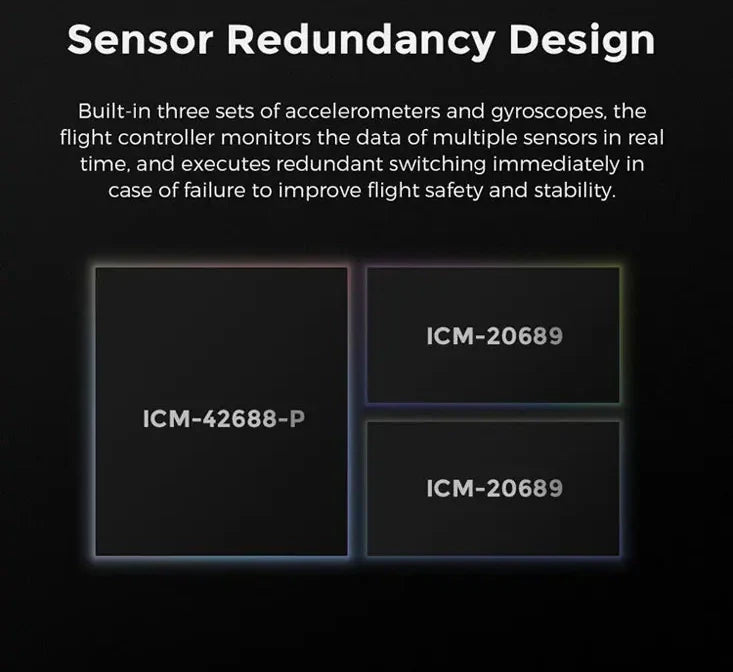
비행 컨트롤러는 ICM-20689 및 ICM-42688-P 모델을 포함하여 3세트의 가속도계 및 자이로스코프를 갖춘 센서 이중화 설계를 특징으로 합니다. 이 설계를 통해 여러 센서 데이터를 실시간으로 모니터링할 수 있어 오류 발생 시 시스템이 즉시 백업 센서로 전환할 수 있습니다. 이러한 중복성은 비행 안전과 안정성을 향상시켜 까다로운 조건에서도 지속적이고 안정적인 작동을 보장합니다.
온도 보상 시스템
고정밀 센서 온도 보상 시스템이 내장되어 센서가 일정한 온도에서 작동하도록 하여 센서가 높고 낮은 환경에서도 높은 정밀도와 감도로 안정적으로 작동할 수 있도록 보장합니다.
코어 별도 디자인
X7+ 비행 컨트롤러는 메인 MCU와 IMU를 CORE 모듈에 통합하고 별도로 판매할 수 있습니다. 사용자는 UAV 구조에 따라 베이스보드를 설계하여 사용자의 개별 요구 사항을 충족하거나 CAN PDB 베이스보드를 구매하여 사용할 수 있습니다. X7+ CORE 인터페이스는 X7, X7 Pro 및 V5+ 비행 컨트롤러 CORE와 호환됩니다. • X7+ < X7+

향상된 CUAV 특허 충격 흡수 시스템
수십 번의 반복을 거쳐 수백 개의 충격 흡수 재료를 테스트하고 검증했으며, 컴퓨터 모델 분석과 수천 번의 비행 테스트를 거쳐 충격 흡수를 한 단계 더 향상시켰습니다. 부츠

더 나은 CUAV 특허 충격 흡수 시스템 . 수백 번의 반복, 수백 개의 충격 흡수 재료 테스트 및 검증. 수십 번의 테스트, 컴퓨터 모델 분석 및 수천 번의 비행 테스트.
X7+ AutoPilot은 5V 출력에 대한 과전류 보호를 포함하여 전류를 2.5A로 제한하는 동시에 단락 보호 기능을 통합하는 등 강력한 안전 및 개발 기능을 갖추고 있습니다. 펌웨어 구축을 위해 직렬 콘솔 및 SWD 인터페이스 연결을 위해 DSU7 포트를 활용하며 컴퓨터의 USB 포트를 통한 간단한 디버깅을 위해 CUAV FTDI 케이블과 호환됩니다. 또한 X7+는 3개의 소스에 연결될 때 전원 공급 장치의 3중 이중화를 지원하여 작동 안정성을 보장합니다. 이 디자인은 비행 안전, 안정성 및 개발 용이성을 우선시하여 X7+를 고급 드론 작동을 위한 다재다능하고 안전한 옵션으로 표시합니다.
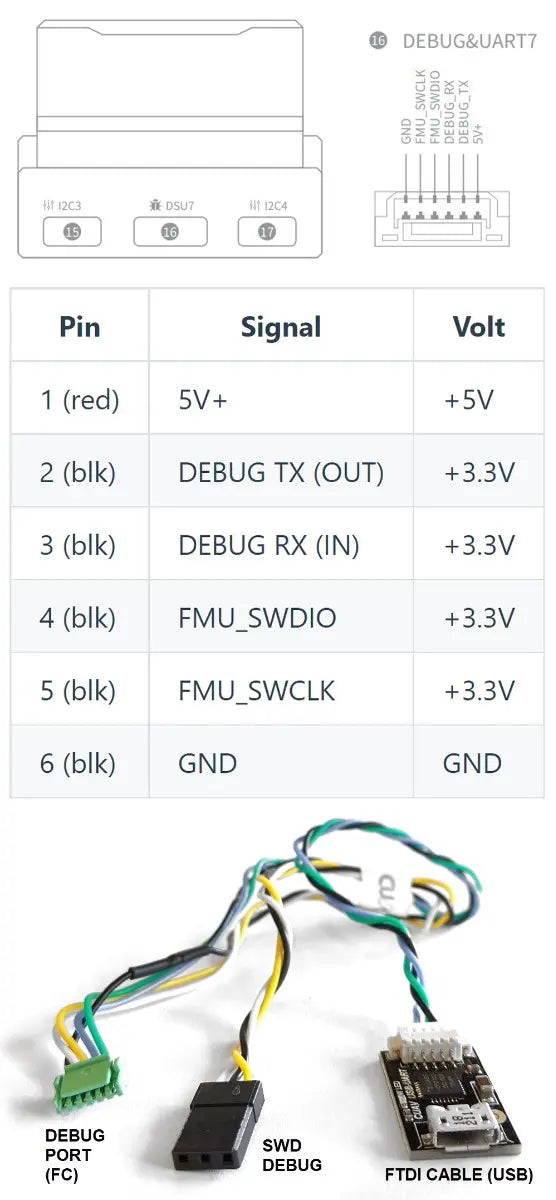
디버그 및 UART7 18 EA 822834 W6 I2C3 DSUT 42C4 핀 신호 전압(빨간색) 5V+ +5V 2(검은색)
CUAV X7 Plus 비행 컨트롤러 검토
cuav x7+ 언박싱 영상
Ardupilot 펌웨어의 cuav x7+ 비행 컨트롤러 설치
SIYI MK15 조종기에 연결된 CUAV X7+ 비행 컨트롤러
Related Collections










