






CubeMars AK10-9 V2.0 로봇 액추에이터 KV60/KV100 | 정격 토크 18Nm/15Nm, 듀얼 엔코더, MIT & 서보 모드
CubeMars AK10-9 V2.0 로봇 액추에이터 KV60/KV100 | 정격 토크 18Nm/15Nm, 듀얼 엔코더, MIT & 서보 모드
CubeMars
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CubeMars AK10-9 V2.0는 고성능 BLDC 모터, 행성 감속기, 듀얼 인코더, 및 통합 드라이버를 하나의 컴팩트한 유닛으로 결합한 고도로 통합된 로봇 액추에이터입니다. MIT 전원 모드와 산업 서보 제어 모드를 모두 지원하며, 부드러운 토크 출력, 정확한 위치 결정, 및 빠른 응답을 제공하여 다리 로봇, 외골격, 및 AGV에 적합합니다. KV60 및 KV100 변형으로 제공되며, 최대 48Nm 피크 토크를 제공하고, 최적화된 열 방출 및 실시간 온도 모니터링으로 장기적인 신뢰성을 보장합니다.
주요 특징
-
이중 제어 모드: MIT 전원 모드와 서보 제어 모드 간의 원활한 전환을 지원하여 유연한 모션 제어를 제공합니다.
-
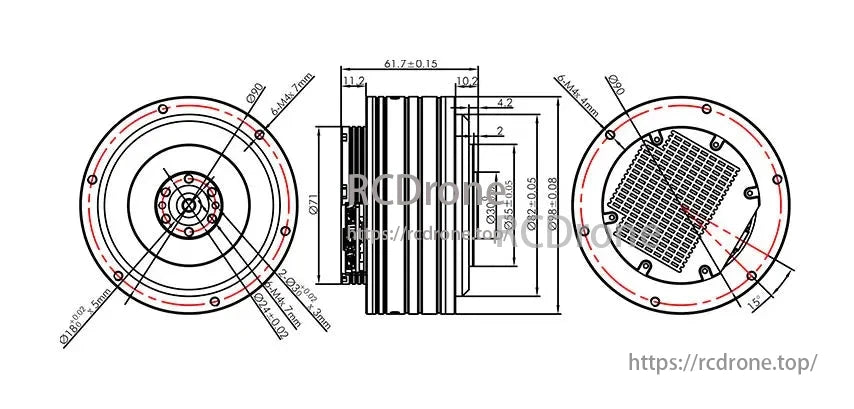
높은 토크 출력: 최대 48Nm 피크 토크와 안정적인 작동 및 낮은 백래시(0.33°).
-
고도로 통합됨: 모터, 인코더, 드라이버 및 행성 감속기를 하나의 컴팩트한 형태로 결합합니다.
-
출력 및 내부 인코더: 통합된 14비트 내부 및 15비트 외부 자기 인코더가 정확한 피드백을 보장합니다.
-
교차 롤러 베어링: 축 방향 및 방사 방향 하중 저항을 향상시켜 동적 응용 프로그램에서 신뢰성을 개선합니다.
-
내부 온도 센서: 실시간 온도 모니터링으로 열 스트레스 하에서 모터 손상을 방지합니다.
-
최적화된 열 방출: 독특한 구조 설계로 열 관리를 개선하여 안정적인 장기 작동을 보장합니다.
-
조용한 작동: 65cm에서 소음 수준이 65 dB 이하입니다 (KV60 버전).
사양
AK10-9 V2.0 K60 사양
| 적용 분야 | 다리 로봇, 외골격, AGV | 최대 토크 (Nm) | 48 |
| 구동 방식 | FOC | 최대 전류 (ADC) | 29.8 |
| 작동 환경 온도 | -20℃~50℃ | Kv (rpm/V) | 60 |
| 권선 유형 | 별 | Kt (Nm/A) | 0.198 |
| 절연 등급 | C | Ke (V/krpm) | 17.2 |
| 절연 고전압 | 1000V 5mA/2s | 상 대 상 저항 (mΩ) | 195 |
| 절연 저항 | 1000V 10MΩ | 상 대 상 인덕턴스 (μH) | 181 |
| 상 | 3 | 관성 (gcm²) | 1002 |
| 극 쌍 | 21 | Km (Nm/√W) | 0.45 |
| 감소 비율 | 9:1 | 기계적 시간 상수 (ms) | 0.5 |
| 백 드라이브(Nm) | 0.8 | 전기적 시간 상수 (ms) | 0.93 |
| 백래시 (°) | 0.33 | 무게 (g) | 960 |
| 온도 센서 | NTC MF51B 103F3950 | 최대 토크 중량 비율 (Nm/kg) | 50 |
| 모터에서 65CM 떨어진 소음 dB | 65 | CAN 커넥터 | A1257WR-S-4P |
| 기본 하중 등급 (dyn. C ) N | 2000 | UART 커넥터 | A1257WR-S-3P |
| 기본 하중 등급 (stat.C0) N | 2520 | 전원 커넥터 | XT30PW-M |
| 정격 전압 (V) | 24/48 | 내부 루프 인코더 유형 | 자기 인코더 |
| 정격 토크 (Nm) | 18 | 내부 링 인코더 해상도 | 14비트 |
| 정격 속도 (rpm) | 109/228 | 외부 링 인코더 유형 | 자기 인코더 |
| 정격 전류 (ADC) | 10.6 | 외부 링 인코더 해상도 | 15비트 |
AK10-9 V2.0 KV100 사양
| 응용 분야 | 다리 로봇, 외골격, AGV | 최대 토크 (Nm) | 38 |
| 구동 방식 | FOC | 최대 전류 (ADC) | 41.2 |
| 작동 환경 온도 | -20℃~50℃ | Kv (rpm/V) | 100 |
| 권선 유형 | 델타 | Kt (Nm/A) | 0.114 |
| 절연 등급 | C | Ke (V/krpm) | 9.9 |
| 절연 고전압 | 1000V 5mA/2s | 상간 저항 (mΩ) | 65.5 |
| 절연 저항 | 1000V10MΩ | 상간 유도 인덕턴스 (μH) | 60 |
| 상 | 3 | 관성 (gcm²) | 1002 |
| 극 쌍 | 21 | Km (Nm/√W) | 0.45 |
| 감소 비율 | 9:1 | 기계적 시간 상수 (ms) | 0.51 |
| 백 드라이브(Nm) | 0.8 | 전기적 시간 상수 (ms) | 0.92 |
| 백래시 (°) | 0.33 | 무게 (g) | 960 |
| 온도 센서 | NTC MF51B 103F3950 | 최대 토크 중량 비율 (Nm/kg) | 39.6 |
| 모터에서 65CM 떨어진 소음 dB | 70 | CAN 커넥터 | A1257WR-S-4P |
| 기본 하중 등급 (dyn. C) N | 2000 | UART 커넥터 | A1257WR-S-3P |
| 기본 하중 등급 (stat.C0) N | 2520 | 전원 커넥터 | XT30PW-M |
| 정격 전압 (V) | 24/48 | 내부 루프 인코더 유형 | 자기 인코더 |
| 정격 토크 (Nm) | 15 | 내부 링 인코더 해상도 | 14비트 |
| 정격 속도 (rpm) | 205/421 | 외부 링 인코더 유형 | 자기 인코더 |
| 정격 전류 (ADC) | 16.2 | 외부 링 인코더 해상도 | 15비트 |
| 인코더 수 | 2 |
응용 프로그램
-
생체 다리 로봇
-
재활 또는 하중 지지용 외골격
-
자율 지상 차량 (AGV)
-
관절 토크 제어 시스템
-
휴머노이드 및 사족 로봇
다운로드
![]() AK 시리즈 드라이버 및 제어 매뉴얼 v1.0.15.X.pdf
AK 시리즈 드라이버 및 제어 매뉴얼 v1.0.15.X.pdf
세부사항
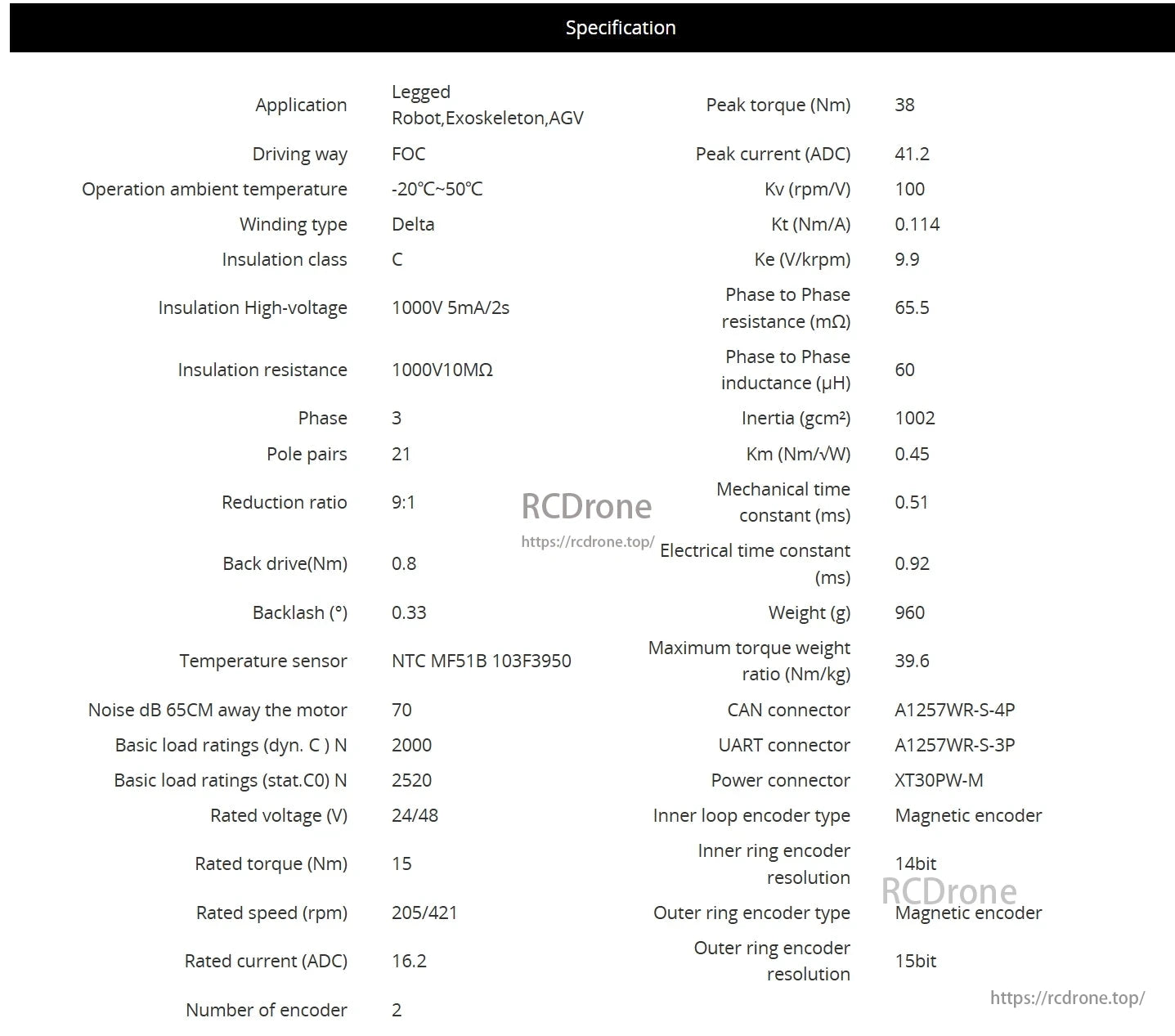
CubeMars AK10 로봇 액추에이터: 38 Nm 피크 토크, 41.2 ADC 피크 전류, -20°C에서 50°C 작동, 9:1 감속비, 960g 무게, 39.6 Nm/kg 최대 토크-무게 비율, 70 dB 소음, 자기 인코더, CAN 및 UART 커넥터.

CubeMars AK10 로봇 액추에이터: 48 Nm 피크 토크, 29.8 A 피크 전류, -20°C에서 50°C 작동, 1000V 절연, 3상, 21극 쌍, 9:1 감속비, 960g 무게, 50 Nm/kg 최대 토크 무게 비율, 자기 인코더.

CubeMars AK10-9 V2.0 KV60@48VDC actu 액추에이터에 대한 분석 차트. 출력 전력(W), 효율, 전류(A), 및 속도(RPM)를 토크(N.m)에 대해 표시합니다. 효율은 약 12 N.m에서 최고조에 달하며, 출력 전력은 토크에 따라 꾸준히 증가합니다. 전류는 선형적으로 증가하고, 속도는 토크가 증가함에 따라 감소합니다. 이 차트는 다양한 하중에서의 액추에이터 성능 특성을 강조합니다.주요 지표에는 최대 출력 전력이 800 W를 초과하고 낮은 토크에서 작동 속도가 350 RPM까지 도달하는 것이 포함됩니다. 이 데이터는 다양한 응용 프로그램에서 액추에이터의 효율성과 전력 역학을 이해하는 데 도움이 됩니다.
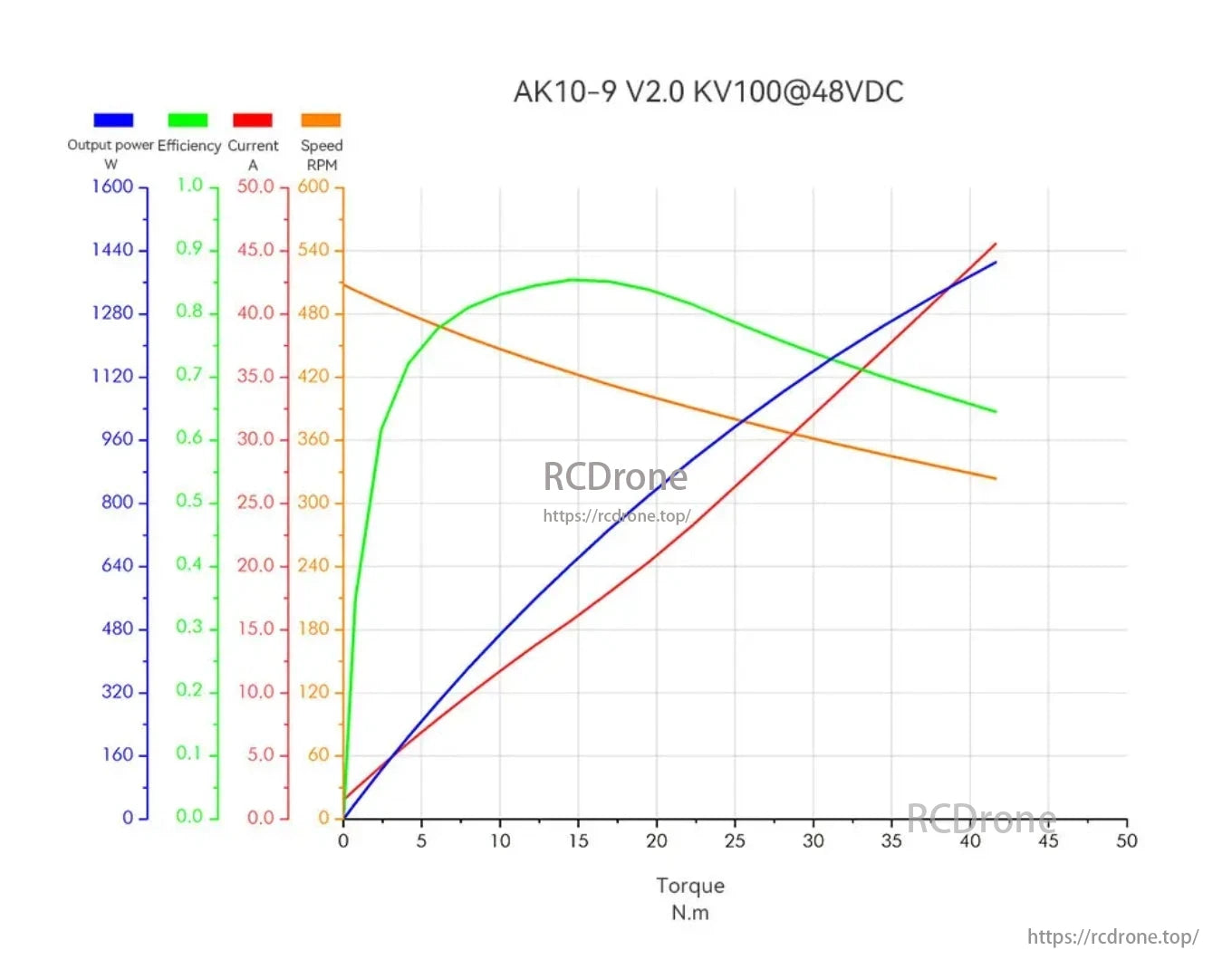
CubeMars AK10-9 V2.0 KV100@48VDC actu의 성능이 나타나 있습니다. 출력 전력(W), 효율성, 전류(A) 및 속도(RPM)가 토크(N.m)에 대해 플로팅됩니다. 효율성은 약 15 N.m에서 최고조에 달하며, 출력 전력은 토크에 따라 선형적으로 증가합니다. 전류도 토크에 따라 꾸준히 증가합니다. 속도는 토크가 증가함에 따라 감소하며, 제로 토크에서 약 480 RPM에서 시작합니다. 그래프는 다양한 응용 프로그램에 대한 최적의 작동 지점을 보여주며, 다양한 하중 조건에서 액추에이터의 능력을 강조합니다. 이 데이터는 특정 작업에 적합한 설정을 선택하는 데 도움이 됩니다.

CubeMars AK10-9 KV60 통합 전력 서보, 포함된 모드. FCC, CE, RoHS V2의 로봇 액추에이터.0 인증.

로봇 액추에이터는 산업 응용을 위한 효율적인 모터 제어, 정확한 전력 모드 및 빠른 응답을 제공합니다.

CubeMars AK10 로봇 액추에이터는 고성능 BLDC 모터, 산업용 크로스 롤러 베어링, 온도 센서, 출력 인코더, 이중 제어 모드 및 안정적인 토크를 위한 행성 감속기를 포함합니다.

구조 및 열 방사를 신속하게 최적화합니다. 모터 외함의 열 방산을 강화하여 수명과 구동 모듈 성능의 안정성을 높입니다. SN: 1010921081.






