





CubeMars AK80-64 KV80 로봇 액추에이터 – 120Nm 최대 토크, 64:1 기어비, MIT 모드
CubeMars AK80-64 KV80 로봇 액추에이터 – 120Nm 최대 토크, 64:1 기어비, MIT 모드
CubeMars
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CubeMars AK80-64 KV80 로봇 액추에이터는 다리 로봇, 외골격 및 AGV를 위해 설계된 고도로 통합된 전원 장치입니다. 강력한 48Nm 정격 토크와 120Nm 피크 토크를 특징으로 하며, 이 액추에이터는 브러시리스 DC 모터, 자체 개발한 64:1 행성 기어박스, 14비트 자기 인코더, 및 통합된 FOC 드라이브를 컴팩트한 형태로 결합합니다. 6–12S 전압, MIT 및 서보 제어 모드, 그리고 PID 자동 조정을 지원하여 AK80-64는 고부하 응용 프로그램에서 정밀하고 효율적인 모션 제어를 가능하게 합니다.
주요 특징
-
높은 토크 출력: 48Nm 정격, 120Nm 최대 토크
-
통합 드라이브 및 인코더: 시스템 설계를 간소화합니다
-
64:1 행성 기어박스: 강력한 출력을 위한 높은 감속비
-
MIT 제어 모드: 부드러운 위치, 속도 및 가속 제어
-
넓은 전압 지원: 24V 또는 48V 시스템과 호환 (6–12S LiPo)
-
컴팩트 및 경량: 단 850g, 높은 토크 대 중량 비율
-
통신: CAN 및 UART와 XT30PW-M 전원 커넥터
-
저소음: ≤60 dB @ 65cm 거리
사양
| 응용 프로그램 | 다리 로봇, 외골격, AGV | 최대 토크 (Nm) | 120 |
| 구동 방식 | FOC | 최대 전류 (ADC) | 19 |
| 작동 환경 온도 | -20℃~50℃ | Kv (rpm/V) | 80 |
| 권선 유형 | 델타 | Kt (Nm/A) | 0.136 |
| 절연 등급 | H | Ke (V/krpm) | 13.7 |
| 고전압 절연 | 1000V 5mA/2s | 상간 저항 (mΩ) | 220 |
| 절연 저항 | 1000V10MΩ | 상간 인덕턴스 (μH) | 133.5 |
| 상 | 삼상 | 관성 (gcm²) | 564.5 |
| 극 쌍 | 21 | Km (Nm/√W) | 0.29 |
| 감소 비율 | 64:1 | 기계적 시간 상수 (ms) | 0.67 |
| 백 드라이브(Nm) | 4.7 | 전기적 시간 상수 (ms) | 0.61 |
| 백래시 (°) | 0.18 | 무게 (g) | 850 |
| 온도 센서 | NTC MF51B 103F3950 | 최대 토크 중량 비율 (Nm/kg) | 141.2 |
| 모터에서 65CM 떨어진 소음 dB | 60 | CAN 커넥터 | A1257WR-S-4P |
| 기본 하중 등급 (dyn. C ) N | 2000 | UART 커넥터 | A1257WR-S-3P |
| 기본 하중 등급 (stat.C0) N | 2520 | 전원 커넥터 | XT30PW-M |
| 정격 전압 (V) | 24/48 | 내부 루프 인코더 유형 | 자기 인코더 |
| 정격 토크 (Nm) | 48 | 내부 링 인코더 해상도 | 14비트 |
| 정격 속도 (rpm) | 23/48 | 외부 링 인코더 유형 | - |
| 정격 전류 (ADC) | 7 | 외부 링 인코더 해상도 | - |
| 인코더 수 | 1 |
응용 프로그램
-
다리 로봇: 인간형 및 사족 보행
외골격: 보조 및 재활 로봇
-
AGV: 자동 유도 차량의 정밀 모터 제어
-
로봇 팔: 높은 토크와 정밀도를 요구하는 산업 및 협업 응용 프로그램
상세정보
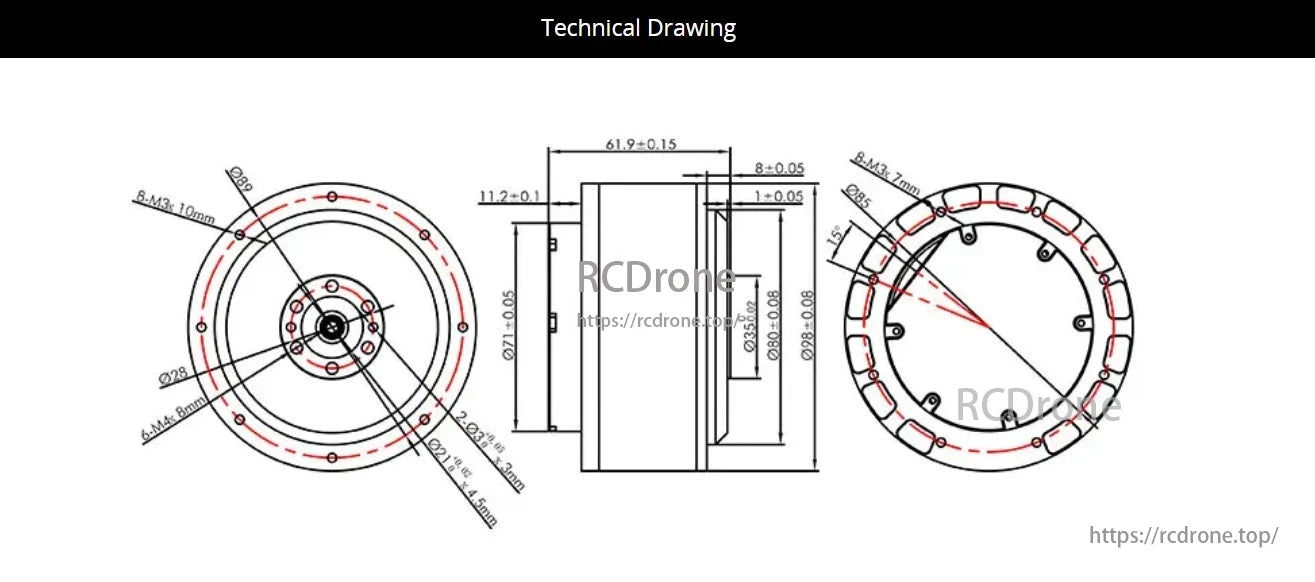
치수 및 사양이 포함된 CubeMars AK80 로봇의 기술 도면.
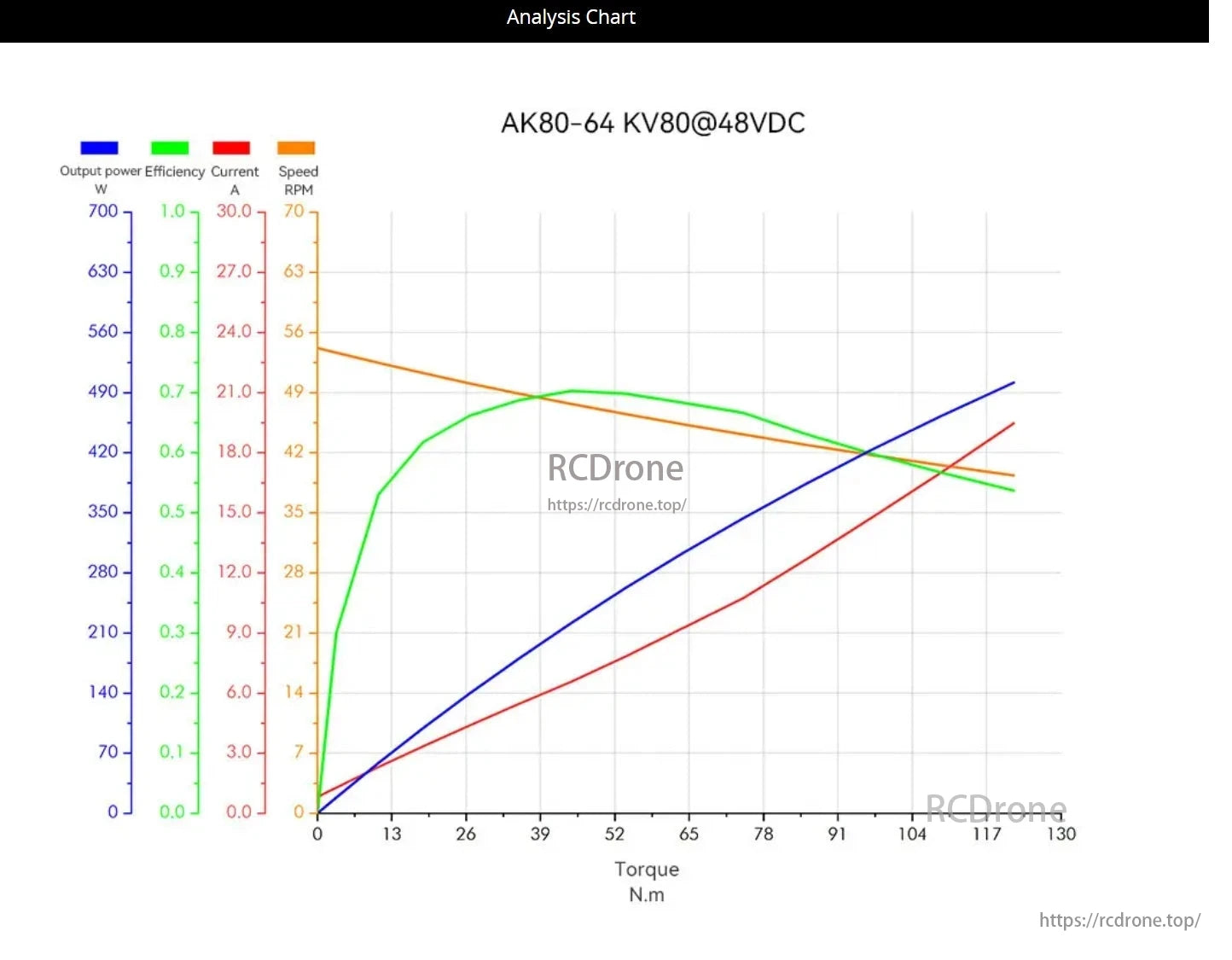
CubeMars AK80-64 의 분석 차트는 N.m에서 토크에 대한 출력 전력 효율, 전류 및 속도를 나타냅니다. 효율성은 52 N.m 근처에서 0.7로 최고조에 달합니다. 전류는 토크에 따라 선형적으로 증가합니다. 속도는 토크가 증가함에 따라 감소하며, 56 RPM에서 시작합니다. 출력 전력은 토크에 따라 꾸준히 증가합니다. 그래프는 명확성을 위해 파란색, 녹색, 빨간색 및 주황색 선을 사용하며, 축은 와트, 암페어, RPM 및 N.m로 레이블이 붙어 있습니다. 데이터는 다양한 하중에서 모터 성능 특성을 보여줍니다.

CubeMars AK80-64KV80: 로봇 공학을 위한 두 가지 기능이 통합된 고성능 동적 모듈입니다.

AK80-64KV80 모터: 고통합, 초경량, 효율적이며 동적인 디자인입니다.

저소음 작동, 강력한 출력. 낮은 코깅 토크, 부드러운 작동, 0.1°의 높은 해상도 및 정밀 제어.
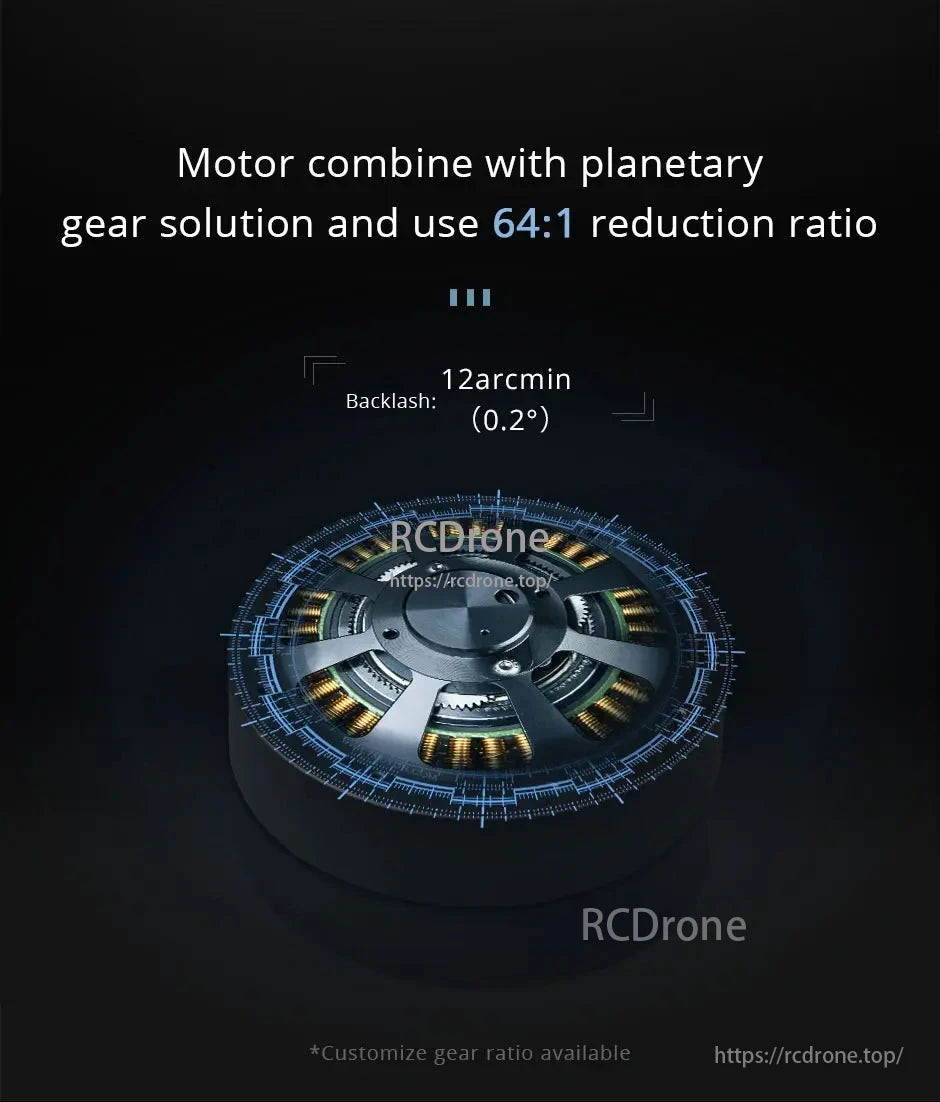
행성 기어가 장착된 모터, 64:1 비율, 12arcmin 백래시.
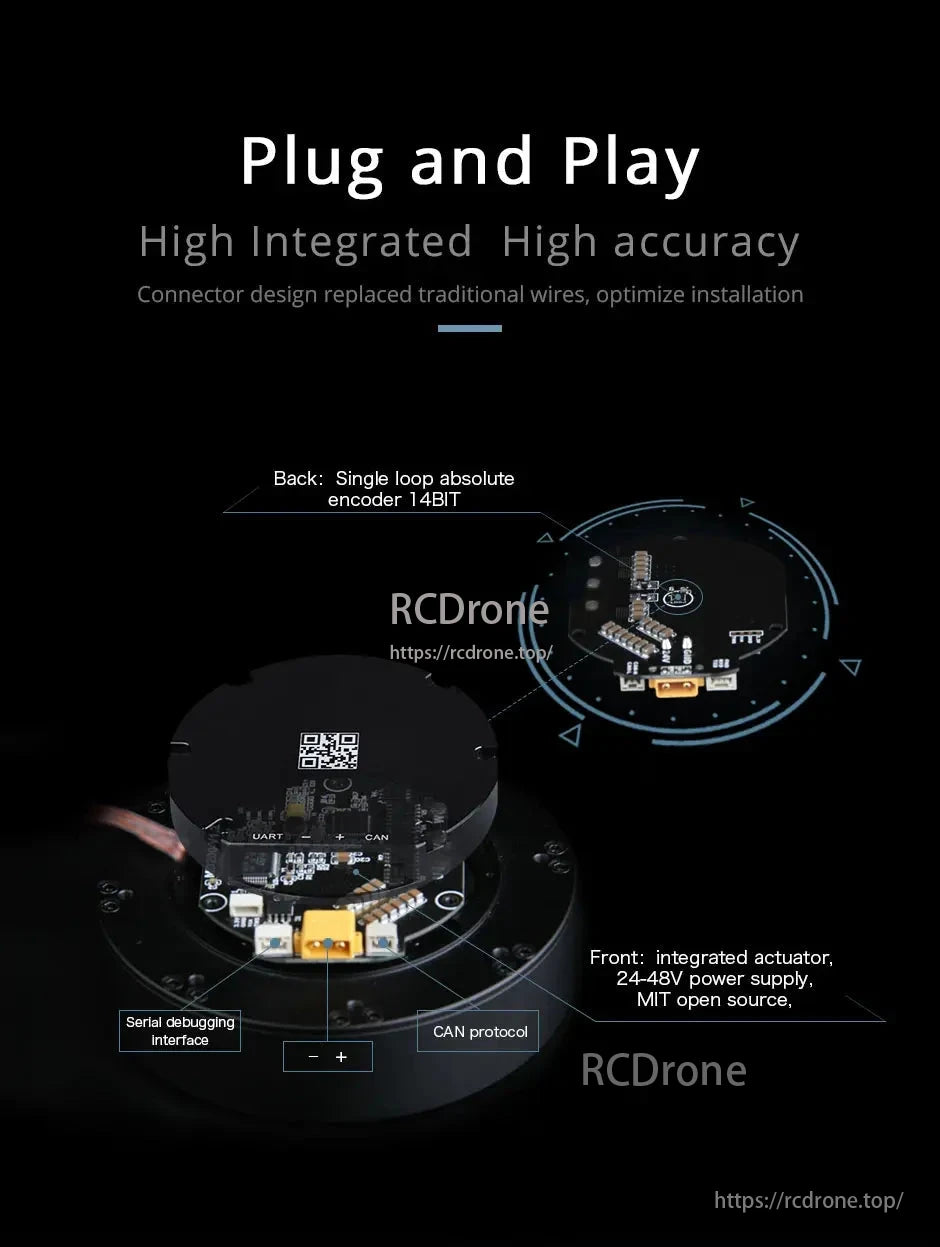
플러그 앤 플레이, 고도로 통합된, 단일 루프 인코더, 통합 액추에이터, 24-48V 전원, CAN 프로토콜 및 직렬 디버깅이 가능한 정확한 로봇 모듈.






