



CubeMars G100 KV10 짐벌 모터 24V 3Nm 7.7Nm 피크 대형 센터홀 고토크 짐벌 레이더용
CubeMars G100 KV10 짐벌 모터 24V 3Nm 7.7Nm 피크 대형 센터홀 고토크 짐벌 레이더용
CubeMars
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CubeMars G100 KV10 짐벌 모터는 원활한 슬립 링 통합을 위한 대형 중앙 관통 홀로 설계되어 케이블 라우팅이 용이합니다. 저 코깅 토크를 특징으로 하여 낮은 에너지 소비와 빠른 반응 속도를 제공합니다. 0.01° 정밀도와 속도 루프 및 위치 루프 제어 모드를 모두 지원하여 짐벌 시스템, 레이더 장치 및 자율 주행 차량에 대한 뛰어난 안정성과 제어를 제공합니다. 높은 슬롯 채움 계수 권선은 높은 토크 밀도로 저속 작동을 가능하게 하며, IP 등급의 방진 및 방수 설계는 어려운 환경에서도 신뢰성을 보장합니다.
주요 특징
-
대형 홀로우 샤프트 – 깔끔한 케이블 관리를 위한 선택적 슬립 링과 통합됩니다.
-
고정밀 – 0.01° 제어 정확도로 부드럽고 안정적인 성능을 제공합니다.
-
다양한 제어 모드 – 다양한 응용을 위한 속도 루프 및 위치 루프 모드를 지원합니다.
-
높은 토크 밀도 – 강력한 토크 출력을 제공하는 저속 작동으로 높은 전력 수요를 충족합니다.
-
견고한 디자인 – 방수, 방진 설계로 열악한 조건에서도 긴 서비스 수명을 보장합니다.
사양
일반 사양
| 매개변수 | 값 |
|---|---|
| 응용 분야 | 짐벌, 레이더 |
| 구동 방식 | FOC |
| 권선 유형 | 스타 |
| 극 쌍 | 20 |
| 상태 | 3 |
| 절연 등급 | H |
| 고전압 절연 | 1000V 5mA/2s |
| 절연 저항 | 1000V 10MΩ |
| 작동 온도 | -20℃ ~ 50℃ |
전기 매개변수
| 매개변수 | 값 |
|---|---|
| 정격 전압 (V) | 24 |
| Kv (rpm/V) | 10 |
| Ke (V/krpm) | 102.4 |
| 무부하 속도 (rpm) | 223 |
| 정격 속도 (rpm) | 130 |
| 정격 토크 (Nm) | 3 |
| 최대 토크 (Nm) | 7.7 |
| 정격 전류 (A) | 2.9 |
| 최대 전류 (A) | 7.8 |
| 상간 저항 (mΩ) | 2650 |
| 상간 인덕턴스 (μH) | 2350 |
| Kt (Nm/A) | 1.030 |
| Km (Nm/√W) | 0.6327 |
| 관성 (gcm²) | 2310 |
| 기계적 시간 상수 (ms) | 0.58 |
| 전기적 시간 상수 (ms) | 0.89 |
| 무게 (g) | 698 |
| 최대 토크 대 중량 비율 (Nm/kg) | 11.03 |
응용 분야
-
전문 짐벌 안정화 시스템
-
자율 주행 센서 플랫폼
-
정밀 위치 지정을 요구하는 레이더 및 감시 장비
수동 다운로드


세부사항

CubeMars G100 KV10 짐벌 모터: 24V, 223 무부하 RPM, 3 Nm 정격 토크, 130 RPM 속도, 2.9 A 전류, 7.7 Nm 피크 토크, 7.8 A 피크 전류, 10 Kv, 1.030 Kt, 698g 무게, -20°C에서 50°C 작동.
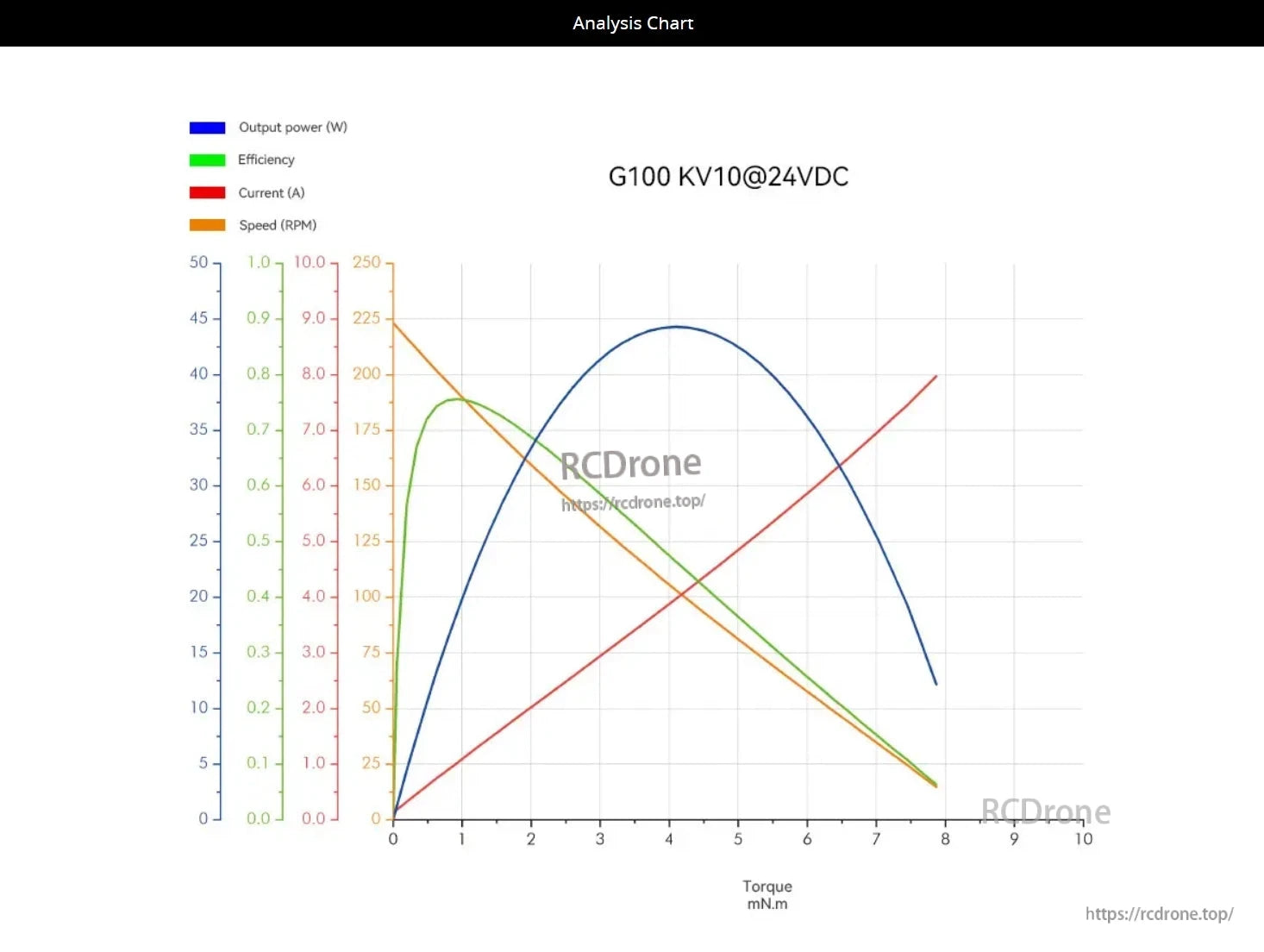
CubeMars G100 KV10@24VDC Gimb알 모터에 대한 분석 차트. 출력 전력(W), 효율, 전류(A), 속도(RPM)를 토크(mN·m)에 대해 표시합니다. 출력 전력은 4 mN·m에서 약 45W로 최고조에 달합니다. 효율은 1 mN·m에서 최대 0.7에 도달합니다. 전류는 토크에 따라 선형적으로 증가합니다. 속도는 225 RPM에서 시작하여 토크가 증가함에 따라 감소합니다. 그래프는 다양한 하중에서의 모터 성능 특성을 보여주며, 특정 토크 요구 사항에 대한 전력 및 효율을 최적화합니다.

CubeMars G100 KV10 짐벌 모터는 높은 안정성의 코어 제어를 제공합니다.

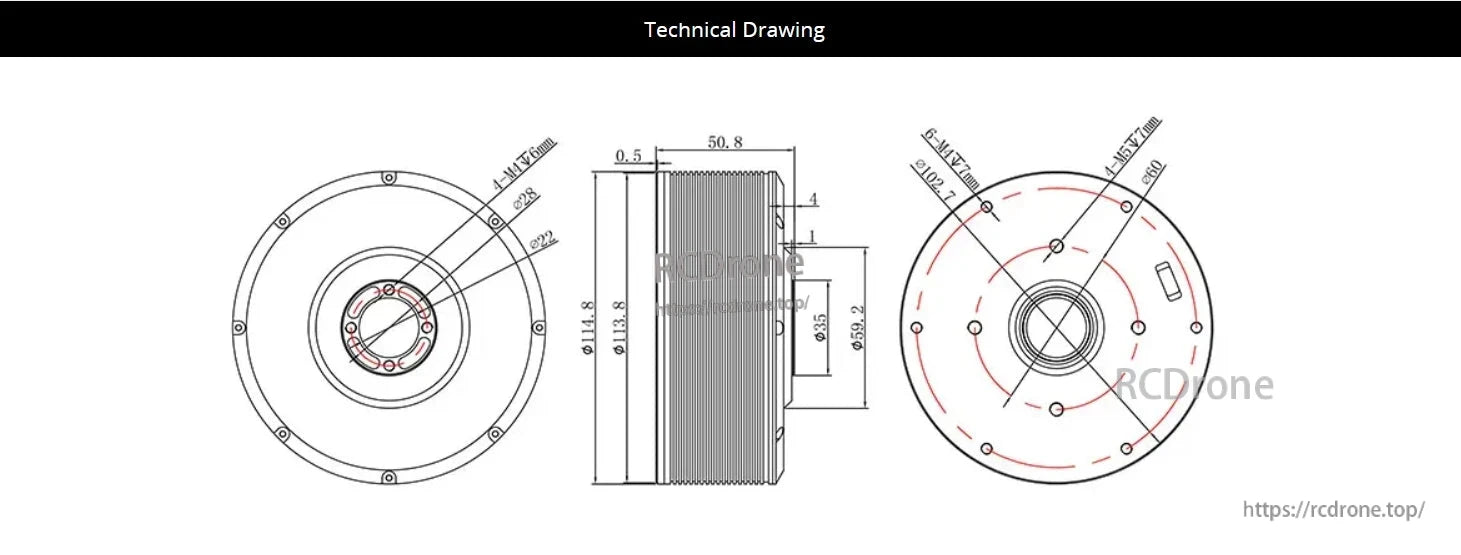
CubeMars G100 KV10 짐벌 모터는 케이블 통과를 용이하게 하는 큰 중앙 구멍과 선택적 슬립 링 통합을 제공합니다.

경량 구조, 더 나은 통합. 낮은 회전 관성, 빠른 반응. CubeMars G100 KV10.
CubeMars G100 KV10은 정밀도를 위한 속도 루프 및 위치 루프 제어 모드를 지원합니다.

고성능 권선: 저속 작동, 높은 토크 밀도로 대규모 전력 요구를 충족합니다. CubeMars G100 KV10 짐벌 모터.

짐벌 시스템과 자율주행 차량은 안정성과 고급 통합을 위해 고정밀 저속 기술을 사용합니다.



