





CubeMars R80 KV110 모터 48V 3상 FOC 홀 센서 포함, 외골격 & 로보틱스 드라이브
CubeMars R80 KV110 모터 48V 3상 FOC 홀 센서 포함, 외골격 & 로보틱스 드라이브
CubeMars
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CubeMars R80 KV110 모터는 외골격 및 로봇 구동 응용 프로그램을 위해 설계된 3상 모터로, 통합된 홀 센서와 FOC(필드 지향 제어)를 지원합니다. 설치를 간소화하기 위해 특별한 열 방출 설계와 커넥터 스타일 인터페이스가 특징입니다.
주요 특징
- 통합 홀 센서
- 전기 각도 정확도 편차: ±10°
- 특별한 열 방출 설계 (초박형 베이스 & 고열 전도성 실리콘 패드; 열 방출 개선을 위한 전체 길이 감소)
- 기어박스 설치를 위한 벨 패턴 홀 디자인 (하모닉 기어박스, 플랜지 또는 기타 기어박스 유형)
- 더 쉬운 설치를 위한 커넥터 디자인 (전통적인 전선 대체)
- 제공된 분석 모터 작동 그래프 (48V에서의 속도 대 토크; 비작동 / 단기 작동 / 지속적 작동 구역)
사양
| 응용 분야 | 외골격 |
| 구동 방식 | FOC |
| 작동 환경 온도 | -20℃~50℃ |
| 권선 유형 | 델타 |
| 절연 등급 | H |
| 절연 고전압 | 1000V 5mA/2s |
| 절연 저항 | 1000V10MΩ |
| 상 | 3 |
| 극 쌍 | 21 |
| 정격 전압 (V) | 48 |
| 무부하 속도 (rpm) | 4320 |
| 정격 토크 (Nm) | 1.3 |
| 정격 속도 (rpm) | 3580 |
| 정격 전류 (ADC) | 12.3 |
| 최대 토크 (Nm) | 4 |
| 최대 전류 (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| 상간 저항 (mΩ) | 125 |
| 상간 인덕턴스 (μH) | 87 |
| 관성 (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| 기계적 시간 상수 (ms) | 0.83 |
| 전기적 시간 상수 (ms) | 0.70 |
| 무게 (g) | 354 |
| 최대 토크 중량 비율 (Nm/kg) | 11.3 |
| 모터 위상 U V W | 참조 엔지니어링 도면 |
| 홀 센서 포트 | VCC, GND, Hu, Hv, HW (참조 엔지니어링 도면) |
| 상응 | Hu-U; Hv-V; Hw-W |
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
매뉴얼 / 문서
배선/드라이버 선택 질문이나 문서 도움이 필요하시면 https://rcdrone.top/를 통해 지원팀에 문의하시거나 이메일 [email protected]. 로 연락해 주십시오.
제공된 차트의 주의 사항: 모든 데이터는 정보 제공 목적으로만 사용됩니다 | 사전 통보 없이 변경될 수 있습니다.
세부사항

CubeMars R80 KV110은 컴팩트 로봇 관절 및 외골격 구동을 위해 설계되었으며, 저프로파일 액추에이터-스타일 폼 팩터를 가지고 있습니다.

통합된 홀 센서는 안정적인 FOC 제어를 위한 로터 위치 피드백을 제공하며, 전기 각도 정확도 편차는 ±10°로 평가됩니다.

특별한 열 방출 설계는 초박형 베이스와 고열전도성 실리콘 패드를 사용하여 컴팩트한 빌드에서 온도를 관리하는 데 도움을 줍니다.

벨에 있는 패턴 장착 구멍은 하모닉 기어박스, 플랜지 또는 기타 기어박스 유형을 부착하는 것을 간소화합니다.
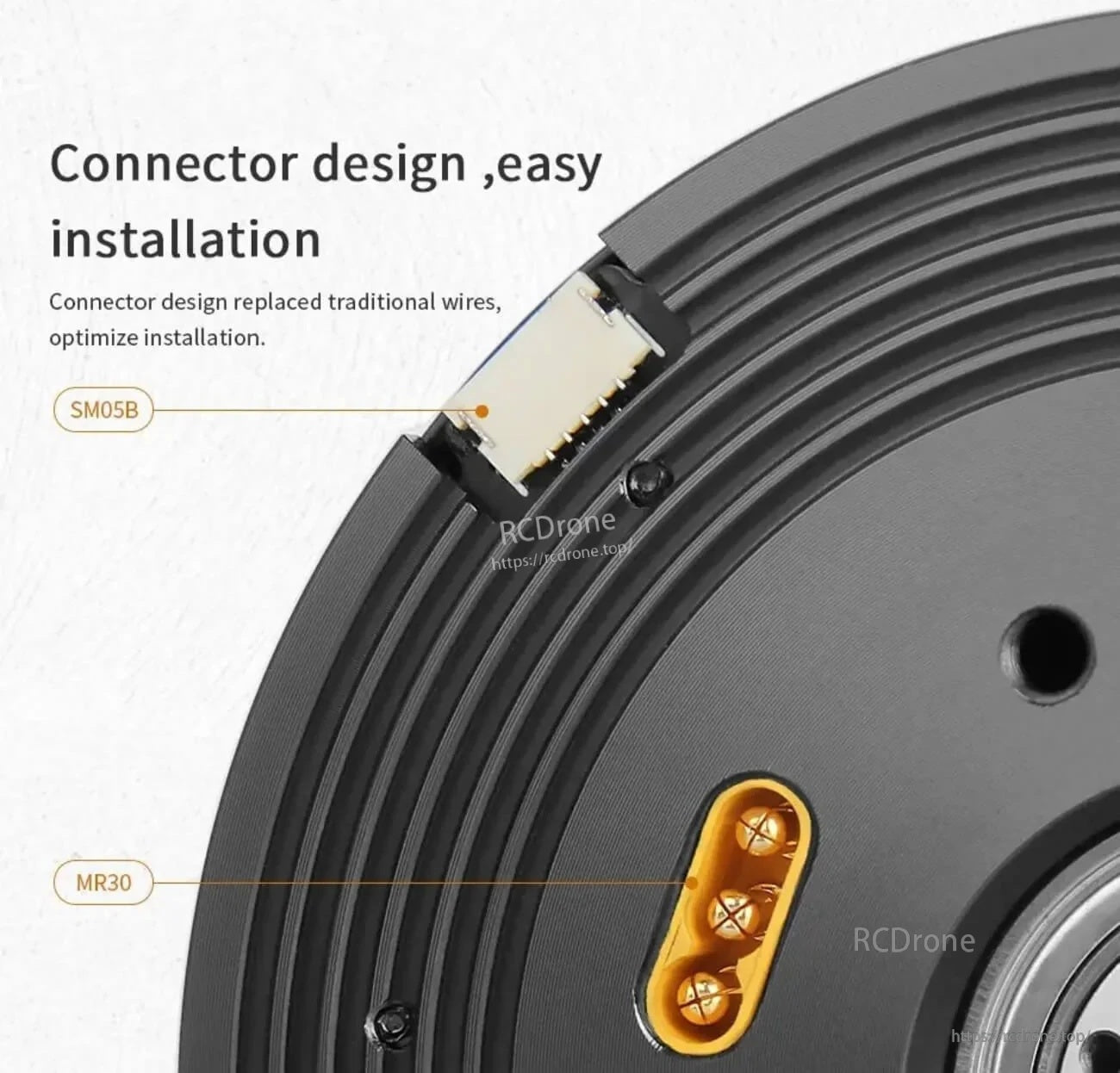
커넥터 스타일 배선은 전통적인 느슨한 리드를 대체하여 전원 및 센서 연결의 설치를 더 깔끔하고 빠르게 만듭니다.
최적화된 전자기 설계는 낮은 코깅 토크와 낮은 로터 관성을 목표로 하여 부드러운 모션 제어를 제공합니다.

안정적인 출력이 중요한 중량 하중 다리 로봇 및 기타 고토크 조인트 응용 프로그램을 위해 설계되었습니다.

48V 속도 대 토크 운영 차트는 안전한 지속 범위를 선택하고 단기 피크 능력을 이해하는 데 도움을 줍니다.





