




CubeMars RI70 KV95 프레임리스 인러너 토크 모터 | 24–48V, 2.68Nm 피크, 270g, 코봇/엑소스켈레톤 대응
CubeMars RI70 KV95 프레임리스 인러너 토크 모터 | 24–48V, 2.68Nm 피크, 270g, 코봇/엑소스켈레톤 대응
CubeMars
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
CubeMars RI70 KV95는 협동 로봇 팔, 외골격 및 기타 정밀 구동 로봇 응용 프로그램을 위해 특별히 설계된 고성능 프레임리스 인러너 토크 모터입니다. 24V에서 48V로 작동하며, 최대 토크는 2.68 Nm, 정격 토크는 0.94 Nm이며, 최대 3912 RPM의 고속 작동을 지원합니다. RI70 모터는 낮은 코깅 토크, 0.01° 초고해상도 제어, 그리고 컴팩트한 프레임리스 구조를 특징으로 하여 다양한 구조 설계에 유연하게 통합될 수 있습니다. 두 가지 버전—홀 센서가 있는 버전 또는 없는 버전—으로 제공되며, 실시간 피드백과 적응형 동적을 요구하는 고정밀 응용 프로그램을 지원합니다.
주요 특징
-
정격 전압: 24V / 36V / 48V
-
KV 등급: 95 rpm/V
-
최대 토크: 2.68 Nm
-
고정밀: 0.01° 인코더 호환성 (Renishaw, Sick 등)
-
프레임리스 인러너 디자인: 컴팩트하고 경량 (270.4g), 통합이 용이합니다.
-
FOC(필드 지향 제어)를 지원합니다.
-
작동 온도 범위: -20°C ~ 50°C
-
높은 구리 채움 계수 및 곡선형 영구 자석: 향상된 토크 밀도 제공
-
옵션 로터 높이 증가 버전: Hall 센서 감지를 최적화하기 위해 +2mm
기계 도면
Hall 센서가 없는 RI70:
-
외경: Ø76 mm (+0.08/-0.02)
-
내부 샤프트 홀: Ø38 ±0.03 mm
-
몸체 길이: 15 mm
-
최대 전체 길이: 73 mm
-
장착 깊이: 6.5 mm (최대)
홀 센서가 있는 RI70:
-
로터 높이가 2mm 증가함
-
홀 신호 전선용 각도 레이아웃이 통합된 PCB
-
추가 장착 여유: 13 mm
-
케이블 길이: 190 ± 5 mm
전기 사양
| 매개변수 | 값 |
|---|---|
| 정격 전압 (V) | 24 / 36 / 48 |
| 무부하 속도 (RPM) | 1956 / 2934 / 3912 |
| 정격 속도 (RPM) | 1270 / 1990 / 2710 |
| 정격 토크 (Nm) | 0.94 |
| 최대 토크 (Nm) | 2.68 |
| 정격 전류 (ADC) | 7.1 |
| 최대 전류 (ADC) | 21 |
| 상 저항 (mΩ) | 418 |
| 상 인덕턴스 (µH) | 622.7 |
| Ke (V/krpm) | 11.69 |
| Kt (Nm/A) | 0.130 |
| Kv (rpm/V) | 95 |
| 관성 (g·cm²) | 92.15 |
| Km (Nm/√W) | 0.2011 |
| 기계적 시간 상수 (ms) | 0.23 |
| 전기적 시간 상수 (ms) | 1.49 |
| 무게 (g) | 270.4 |
| 토크 대 중량 비율 | 9.91 Nm/kg |
배선 및 커넥터 세부정보
| 신호 | 선 색상 | 선 게이지 |
|---|---|---|
| U | 검정 | 16# 실리콘 |
| V | 노랑 | 16# 실리콘 |
| W | 빨강 | 16# 실리콘 |
| Hu | 파랑 | 30# 실리콘 |
| Hv | 초록 | 30# 실리콘 |
| Hw | 파랑 | 30# 실리콘 |
| VCC | 빨강 | 30# 실리콘 |
| GND | 검정 | 30# 실리콘 |
인코더 배선 대응:
Hu → U, Hv → V, Hw → W
성능 곡선 (RI70 KV95 @ 24VDC)
-
최대 효율은 약 0에서 달성되었습니다.3 Nm 토크
-
출력 전력은 ~220W에서 2.6 Nm
에 도달합니다. -
고속, 저부하 및 부드러운 동적 제어 환경에 최적입니다.
구성 하이라이트
-
핸드 와운드 스테이터: 높은 토크 밀도와 동적 반응을 위해 설계됨
-
곡선형 영구 자석: 사인파 BEMF 제어를 위해 설계됨
-
0.5mm 간격: 정밀한 장착 및 공기 흐름을 용이하게 함
-
넓은 작동 범위: -20°C에서 +50°C까지의 주변 온도를 지원함
-
선택적 높이 증가 로터: 홀 센서와 함께 사용할 때 자기 결합을 개선함
응용 분야
-
협동 로봇(Cobot) 관절
-
외골격 액추에이터
-
정밀 산업용 팔
-
재활 및 보조 로봇
-
연구 및 교육 플랫폼
인코더 호환성(선택 사항)
-
고해상도 절대 인코더 옵션 (e.g., Renishaw, Sick)
-
해상도 최대 0.01°
-
모터 기하학에 내장된 인코더 장착 지지대
세부사항

CubeMars RI70 모터 치수: Ø76, Ø47, Ø45.8, Ø38, Ø48 (최소), Ø73 (최대), 길이 15, 최대 높이 6.5.

CubeMars RI70 모터 치수: 높이 76mm, 지름 73mm. 홀 센서, 4-R1.5 구멍, 길이 200±5mm, 너비 190±5mm, 각도 25°의 특징이 있습니다.

CubeMars RI70 모터: 협동 로봇 팔/외골격 응용, FOC 구동, -20°C-50°C 작동, 14극 쌍. 정격 전압 24/36/48V, 무부하 속도 1956/2934/3912 rpm, 정격 토크 0.94Nm, 최대 토크 2.68Nm. 무게 270.4g.
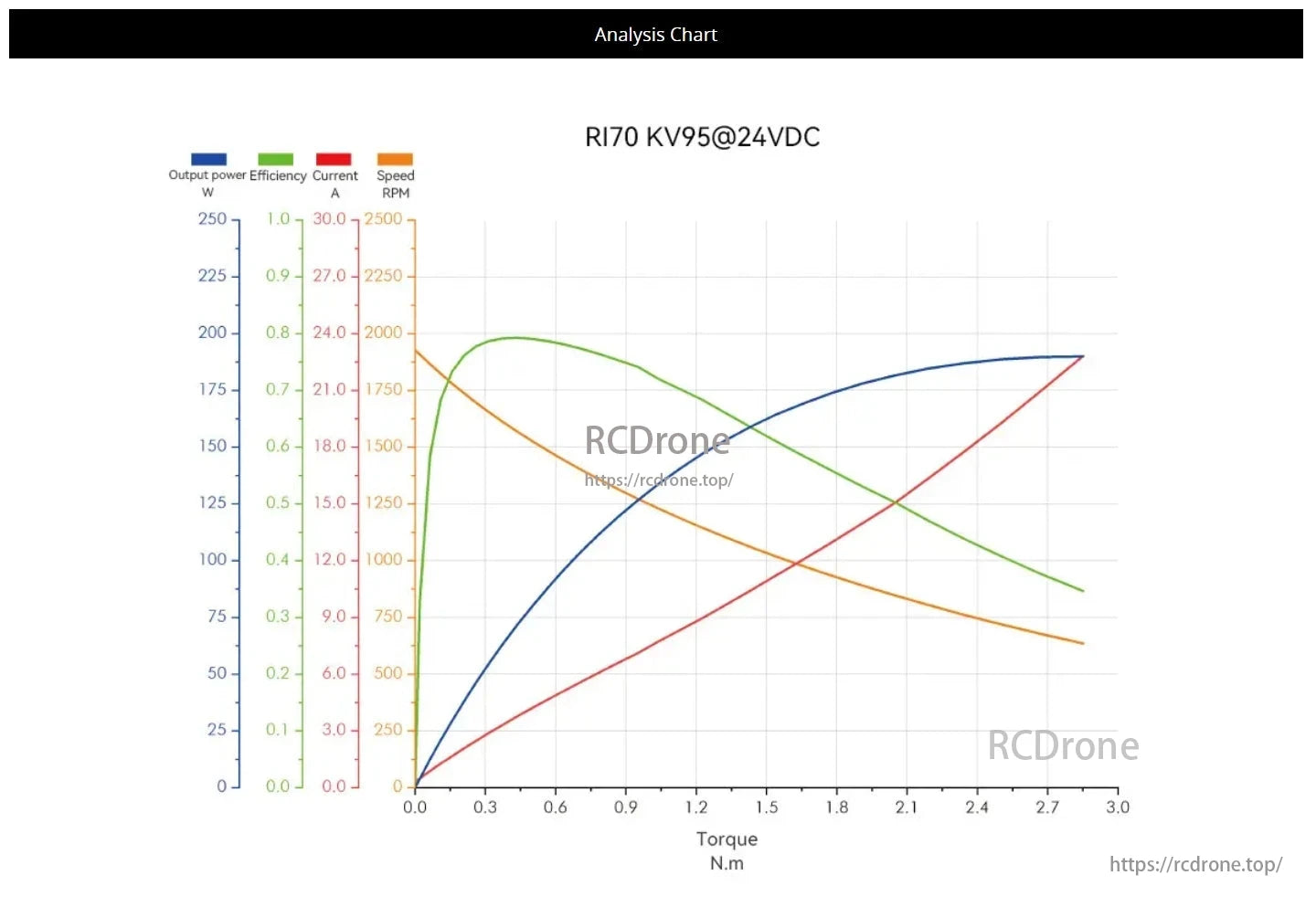
RI70 분석 차트 KV95@24VDC motor. 토크에 대한 출력 전력, 효율, 전류 및 속도를 표시합니다. 그래프는 다양한 조건에서의 성능 지표를 강조합니다.

CubeMars RI70 모터: 낮은 코깅 토크, 부드러운 작동, 저소음, 강력한 동적 성능.

높은 토크 밀도를 위한 0.5mm 간격의 수동 권선 스테이터.

쉬운 제어를 위한 곡선형 영구 자석 BEMF 사인 모터 설계.

RI70 로터 강화 버전: 홀 센서 감지를 개선하기 위해 전체 높이가 2mm 증가했습니다.

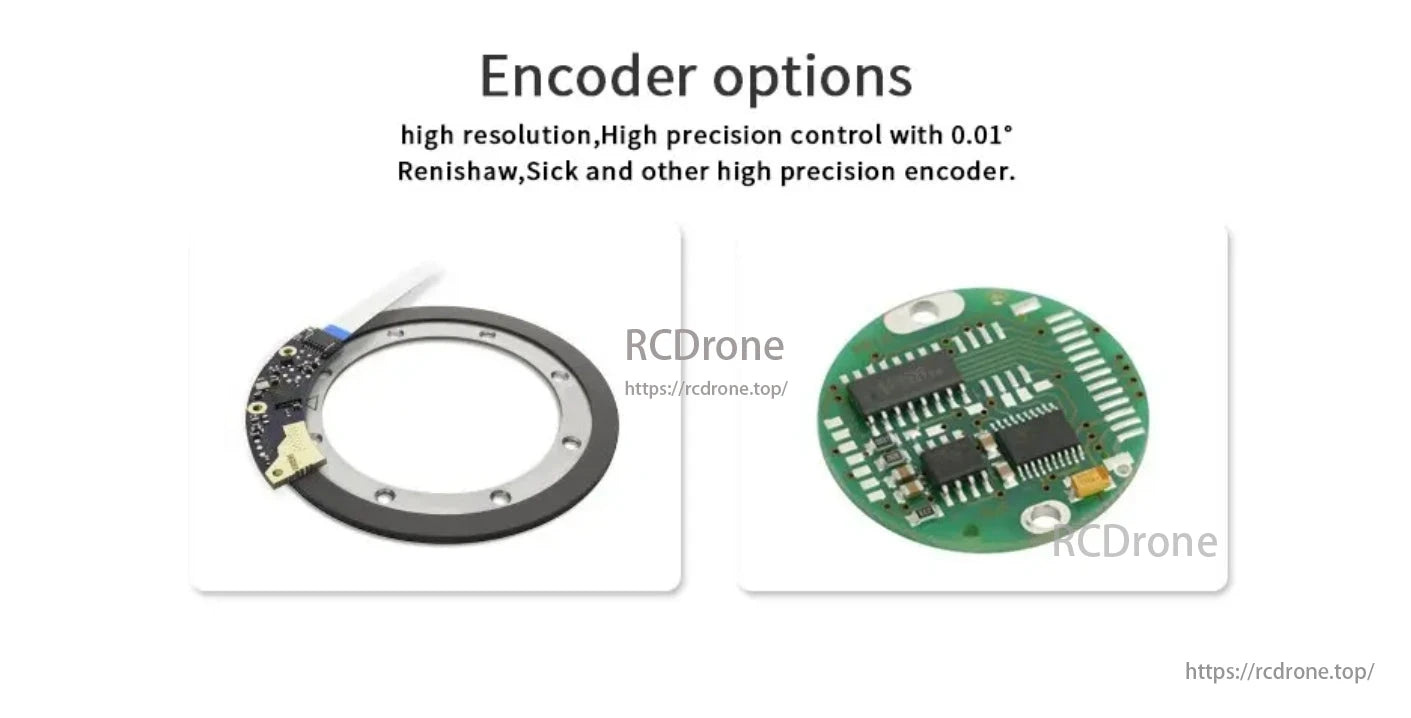
인코더 옵션: 0.01° 정확도로 고해상도, 고정밀 제어. Renishaw, Sick 및 기타 고정밀 인코더가 특징입니다.




