



DAMIAO DM-2325 24V, 380rpm, 5N·m 로봇 모터(1:25 기어, CAN/FD CAN 및 인크리멘탈 엔코더 포함)
DAMIAO DM-2325 24V, 380rpm, 5N·m 로봇 모터(1:25 기어, CAN/FD CAN 및 인크리멘탈 엔코더 포함)
DAMIAO
정가
$45.00 USD
정가
할인가
$45.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
DAMIAO DM-2325는 로봇 공학에서 정밀한 모션 제어를 위해 설계된 컴팩트 로봇 모터입니다. 이 모터는 증분 인코더 피드백, CAN/FD CAN 제어 인터페이스 및 UART 구성을 특징으로 합니다. 1:25 감속비, 24 V 전원 공급 및 정의된 제어 모드를 갖추고 있어 신뢰할 수 있는 속도 및 위치 조정이 필요한 응용 프로그램에 적합합니다.
주요 특징
- 모델: DM-2325
- 정격 전압: 24 V
- 정격 전류: 5 A / 3.2 A; 최대 전류: 13 A / 7.5 A
- 정격 토크: 5 N·m; 최대 토크: 2 N·m
- 정격 속도: 380 rpm; 최대 무부하 속도: 560 rpm
- 감속비: 1:25; 극 쌍: 7
- 상 인덕턴스: 75 μH; 상 저항: 0.2915 Ω
- 최대 방사 하중: 395 N
- 치수: 외경 28 mm; 높이 77.6 mm
- 모터 무게: 172.
- 무게: 2 g
- 인코더 유형: 증분 인코더
- 제어 인터페이스: CAN@1 Mbps (최대), FD CAN@5 Mbps (최대)
- 구성 인터페이스: UART@921600 bps
- 제어 모드: MIT 모드, 속도 모드, 위치 모드
사양
| 모델 | DM-2325 | |
| 정격 전압 | 24 V | |
| 정격 전류 | 5 A / 3.2 A | |
| 최대 전류 | 13 A / 7.5 A | |
| 정격 토크 | 5 N·m | |
| 최대 토크 | 2 N·m | |
| 정격 속도 | 380 rpm | |
| 최대 무부하 속도 | 560 rpm | |
| 감속비 | 1:25 | |
| 극 쌍 | 7 | |
| 상 인덕턴스 | 75 μH | |
| 상 저항 | 0.html | 2915 Ω |
| 최대 방사 하중 | 395 N | |
| 외경 | 28 mm | |
| 높이 | 77.6 mm | |
| 모터 무게 | 172.2 g | |
| 인코더 유형 | 증분 인코더 | |
| 제어 인터페이스 | CAN@1 Mbps (최대), FD CAN@5 Mbps (최대) | |
| 구성 인터페이스 | UART@921600 bps | |
| 제어 모드 | MIT 모드; 속도 모드; 위치 모드 |
보호
- 드라이브 과열 보호; 보호 온도: 120 °C. 과열 시 "사용 가능 모드"에서 종료됩니다.
- 모터 과열 보호; 사용 요구 사항에 따라 설정 (100 °C를 초과하지 않는 것이 권장됨). 과열 시 "사용 가능 모드"에서 종료됩니다.
- 모터 과전압 보호; 사용 요구 사항에 따라 설정 (60 V를 초과하지 않는 것이 권장됨). 과전압 시 "사용 가능 모드"에서 종료됩니다. html
- 통신 손실 보호; 설정된 기간 내에 CAN 명령이 수신되지 않으면 시스템이 "활성화 모드"를 종료합니다.
- 모터 과전류 보호; 사용 요구 사항에 따라 설정 (13 A를 초과하지 않는 것이 권장됨). 과전류가 발생하면 "활성화 모드"를 종료합니다.
- 모터 저전압 보호; 공급 전압이 설정 값보다 낮으면 "활성화 모드"를 종료합니다 (전원 공급 전압은 15 V 이상이어야 함).
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
매뉴얼 및 다운로드
설치 도면
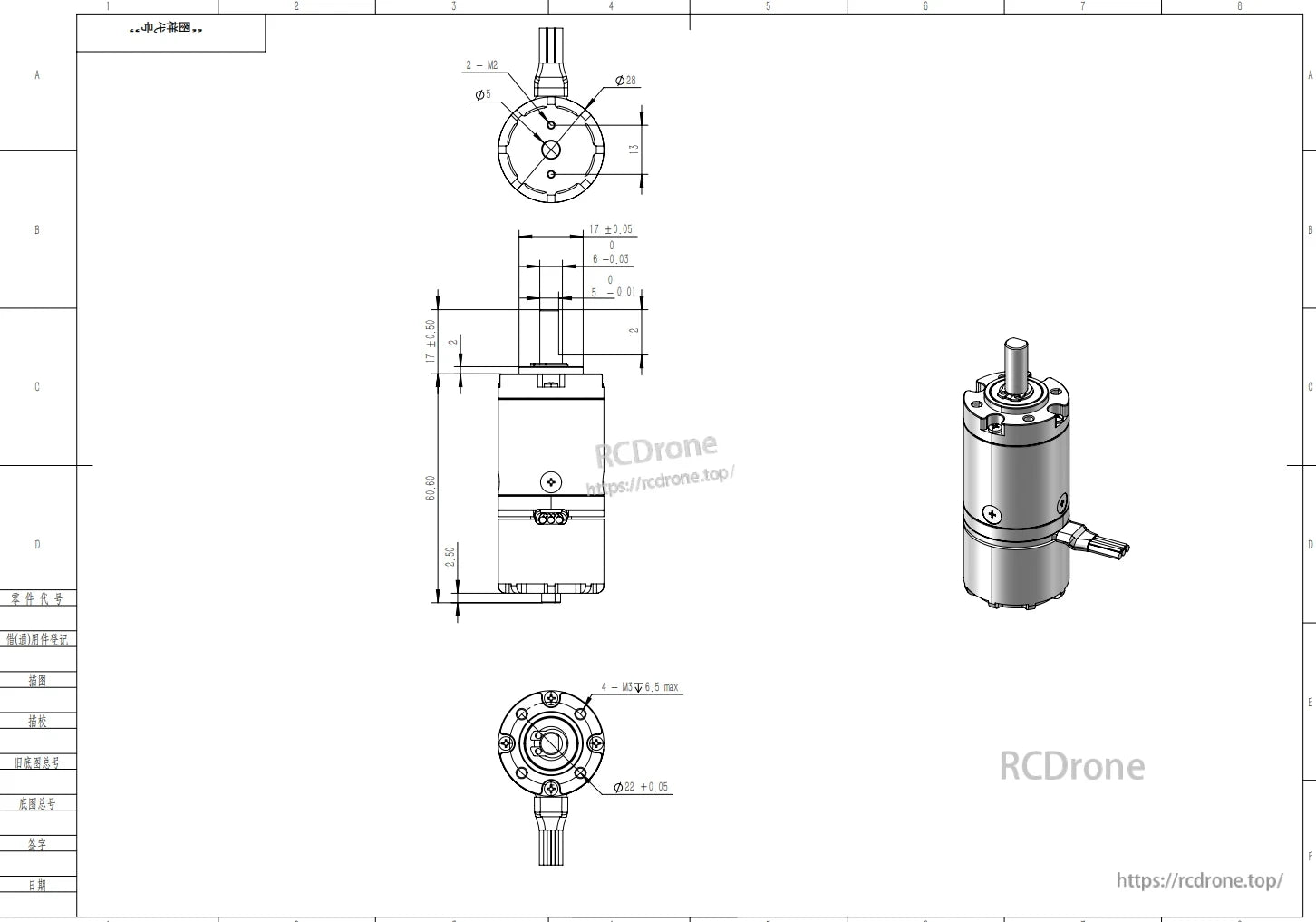
로봇 모터 기술 도면, 치수 및 사양 포함





- 선택을 누르면 전체 페이지가 새로 고쳐집니다.
- 새 창에서 열립니다.