




DAMIAO DM-J10010L-2EC 로봇 모터, 48V, 40N·m 정격, 120N·m 최대, 10:1, 듀얼 엔코더, 통합 드라이버, CAN/UART
DAMIAO DM-J10010L-2EC 로봇 모터, 48V, 40N·m 정격, 120N·m 최대, 10:1, 듀얼 엔코더, 통합 드라이버, CAN/UART
DAMIAO
정가
$225.00 USD
정가
할인가
$225.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
DAMIAO DM-J10010L-2EC 로봇 모터는 컴팩트한 크기, 높은 토크 밀도 및 정밀한 제어가 필요한 로봇 응용 프로그램을 위해 설계된 통합 모터 및 드라이버 조립체입니다. 이 로봇 모터는 출력 샤프트에서 단일 회전 절대 위치를 제공하는 이중 인코더를 특징으로 하며, 전원이 꺼진 후에도 절대 위치의 손실이 없습니다. 호스트 컴퓨터의 시각적 디버깅, 펌웨어 업그레이드 및 CAN을 통한 풍부한 텔레메트리(속도, 위치, 토크 및 모터 온도)를 지원합니다.
주요 특징
- 단일 회전 절대 출력 샤프트 위치를 가진 이중 인코더; 전원 사이클을 통해 절대 위치를 유지합니다.
- 컴팩트하고 고도로 통합된 액추에이터 패키지를 위한 통합 모터 + 드라이버.
- 호스트 컴퓨터의 시각적 디버깅 및 펌웨어 업그레이드 지원.
- 속도, 위치, 토크 및 모터 온도를 위한 CAN 버스 텔레메트리.
- 이중 온도 보호.
사양
| 모델 | DM-J10010L-2EC |
| 정격 전압 | 48 V |
| 정격 전류 | 23.5 A |
| 최대 전류 | 95 A |
| 정격 토크 | 40 N.M |
| 최대 토크 | 120 N.M |
| 정격 속도 | 70 rpm @ 24 V; 100 rpm @ 48 V |
| 최대 무부하 속도 | 100 rpm @ 24 V; 200 rpm @ 48 V |
| 감속비 | 10:1 |
| 극 쌍 | 21 |
| 상 인덕턴스 | 85 uH |
| 상 저항 | 0.html 11 옴 |
| 외경 | 120 mm |
| 높이 | 53 mm (위치 핀 제외; 돌출: 3 mm 직경 x 3 mm) |
| 모터 무게 | 1372 g |
| 인코더 해상도 | 14비트 |
| 인코더 수량 | 2 |
| 인코더 유형 | 단회전 자기 인코더 |
| 제어 인터페이스 | CAN@1Mbps |
| 구성 인터페이스 | UART@921600bps |
포함된 항목
- 모터 (드라이버 포함) x 1
- 전원 연결 케이블: XT30 남성-여성 전원 케이블 x 1
- CAN 통신 단자: GH1.25 연결 케이블 - 2핀 x 1
- 디버깅 직렬 포트 신호 케이블: GH1.
- 25 연결 케이블 - 3핀 x 1
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 4족 보행 로봇
- AGV 차량
- ARU 로봇
매뉴얼 및 다운로드
설치 도면
장착 치수 및 구멍 패턴에 대한 설치 도면 다운로드를 위에서 참조하십시오. 도면 미리보기는 세부 정보 섹션을 참조하십시오.
상세 정보
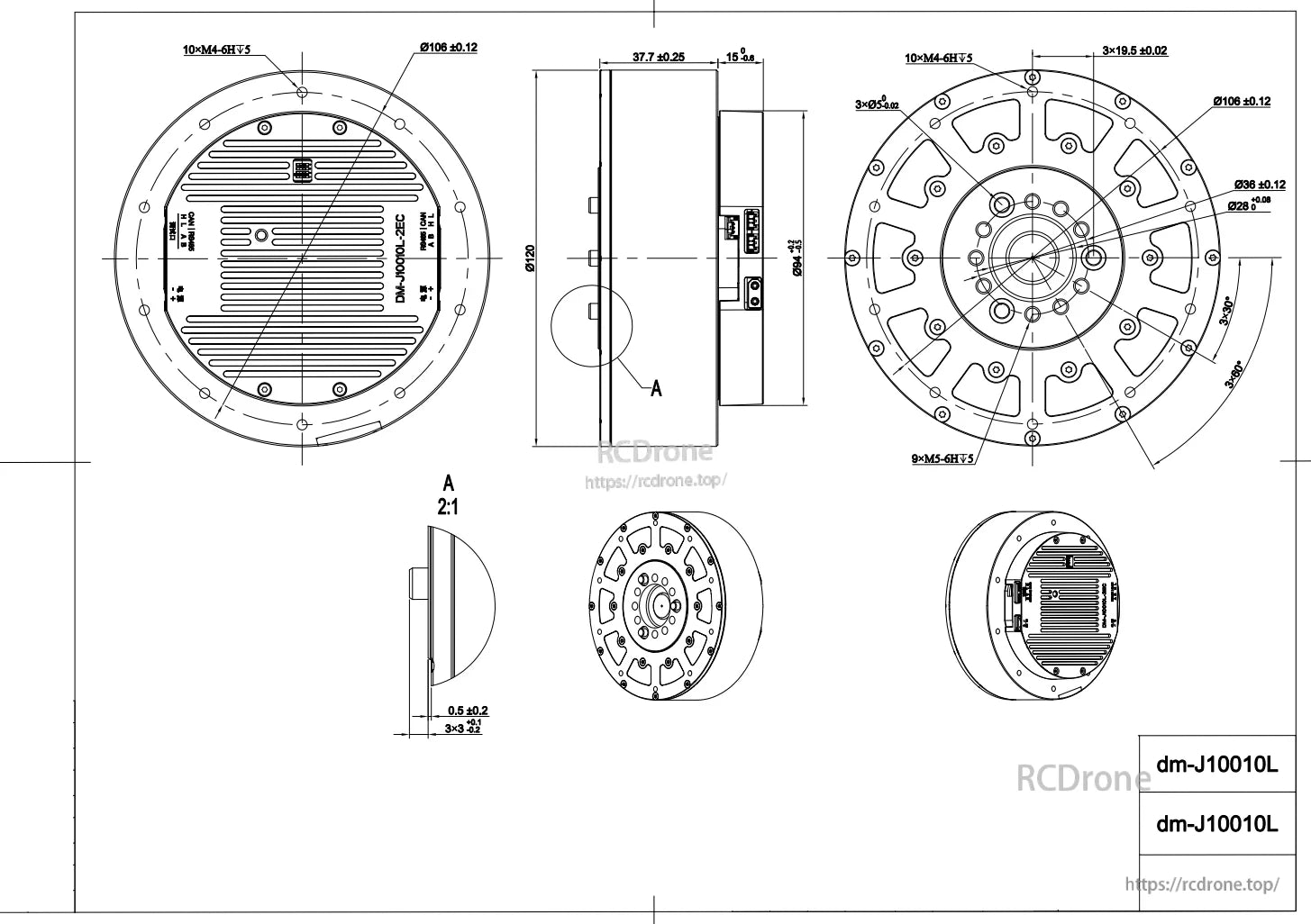
DAMIAO DM-J10010L-2EC 로봇 모터, 직경 106mm, 높이 37.7mm, 샤프트 20mm, 10×M4 및 9×M5 장착 나사산; 정밀한 치수로 정확한 조립을 보장합니다.




