


DAMIAO DMH3510 24V 0.45N·m 피크 500rpm CAN/CAN FD 마그네틱 엔코더 42mm 로봇 모터 (로보틱스용)
DAMIAO DMH3510 24V 0.45N·m 피크 500rpm CAN/CAN FD 마그네틱 엔코더 42mm 로봇 모터 (로보틱스용)
DAMIAO
정가
$47.00 USD
정가
할인가
$47.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
응용 시나리오
휴머노이드 로봇
로봇 팔
외골격
사족 로봇
AGV 차량
ARU 로봇
기술 사양
| 매개변수 | 값 | |
|---|---|---|
| 모델 |
DMH3510
|
|
| 정격 전압 | 24V | |
| 정격 전류 | 1.1A | |
| 최대 전류 | 3.2A | |
| 정격 토크 | 0.18N.M | |
| 최대 토크 | 0.45N.M | |
| 정격 속도 |
500rpm |
|
| 최대 무부하 속도 | 1800rpm | |
| html | ||
| 감소 비율 | 1:1 | |
| 극 쌍 | 7 | |
| 상 인덕턴스 | 1.67μH | |
| html | ||
| 상태 저항 | 2.25Ω | |
| 외경 | 42mm | |
| 높이 | 31.5mm | |
| html | 모터 무게 | 116g |
| 인코더 유형 | 자기 인코더 | |
| 제어 인터페이스 |
CAN@1Mbps、CANFD@5Mbps |
|
| html 1875px;">구성 인터페이스 | UART@921600bps |
모터 특징
1. 통합 모터 및 드라이버 설계, 컴팩트한 구조 및 높은 통합도.
2. CAN 버스를 통한 모터 속도, 위치, 토크 및 온도 정보 피드백.
3. 이중 온도 보호.
4.
호스트 컴퓨터를 통한 시각적 매개변수 조정으로 쉽게 구성하고 즉시 사용할 수 있습니다.
5. 최대 전송 속도 5Mbps의 CAN FD를 지원합니다.
6. 저속, 고토크.
7. 여러 제어 모드 간의 유연한 전환이 가능합니다.
패키지 목록
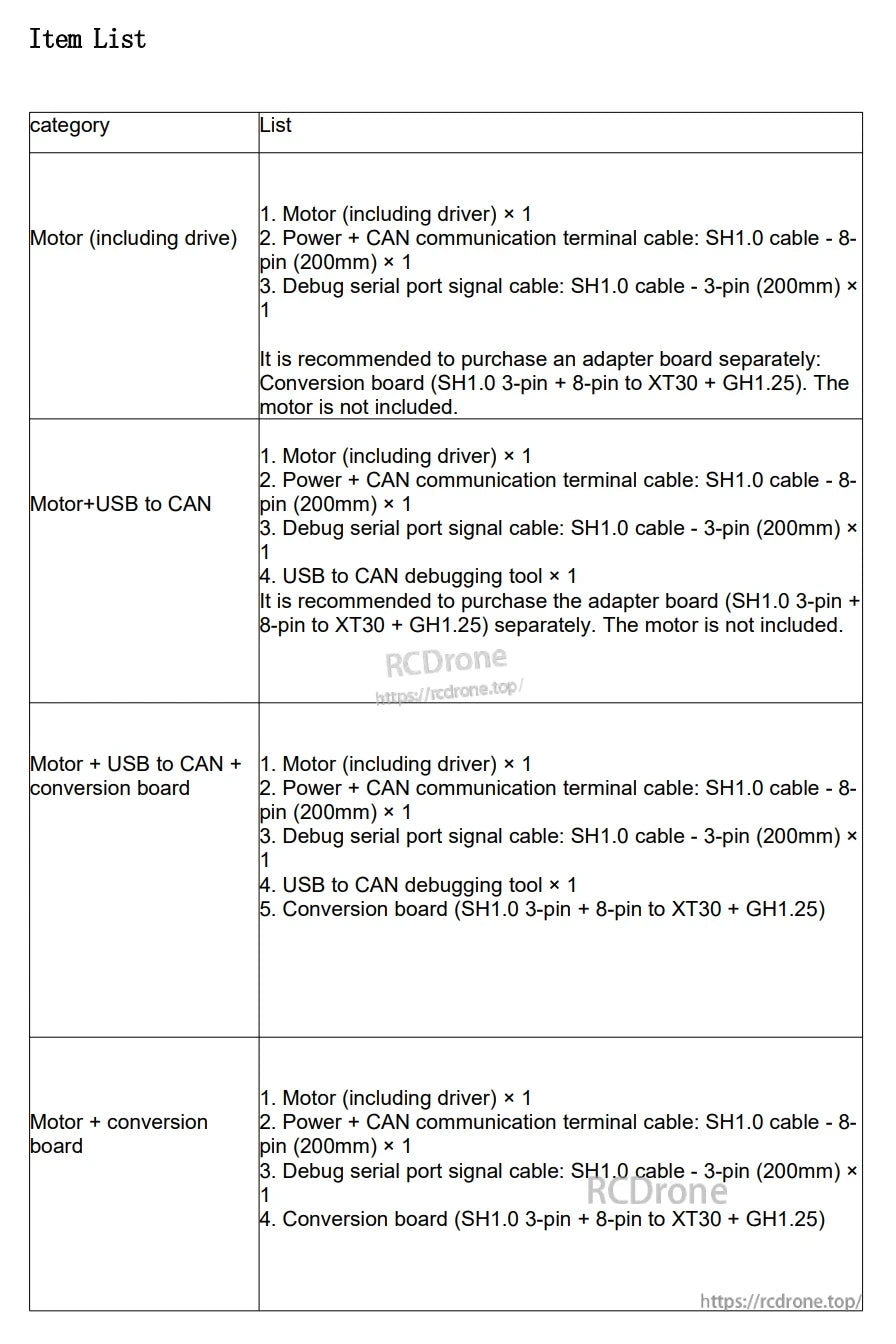
DMH3510 자석 모터의 품목 목록에는 드라이버가 있는 모터, 전원 및 CAN 케이블, 디버그 케이블, USB to CAN 도구 및 변환 보드가 포함됩니다. 구성 요소는 패키지 유형에 따라 다르며, 어댑터 보드는 별도로 권장됩니다. 모든 옵션에 모터가 포함되어 있지 않습니다.


