




DFRobot SEN0142 MPU6050 6자유도 자이로스코프 가속도계 IMU 모듈(I2C 디지털 모션 프로세서 포함) 아두이노 & 로보틱스
DFRobot SEN0142 MPU6050 6자유도 자이로스코프 가속도계 IMU 모듈(I2C 디지털 모션 프로세서 포함) 아두이노 & 로보틱스
DFRobot
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
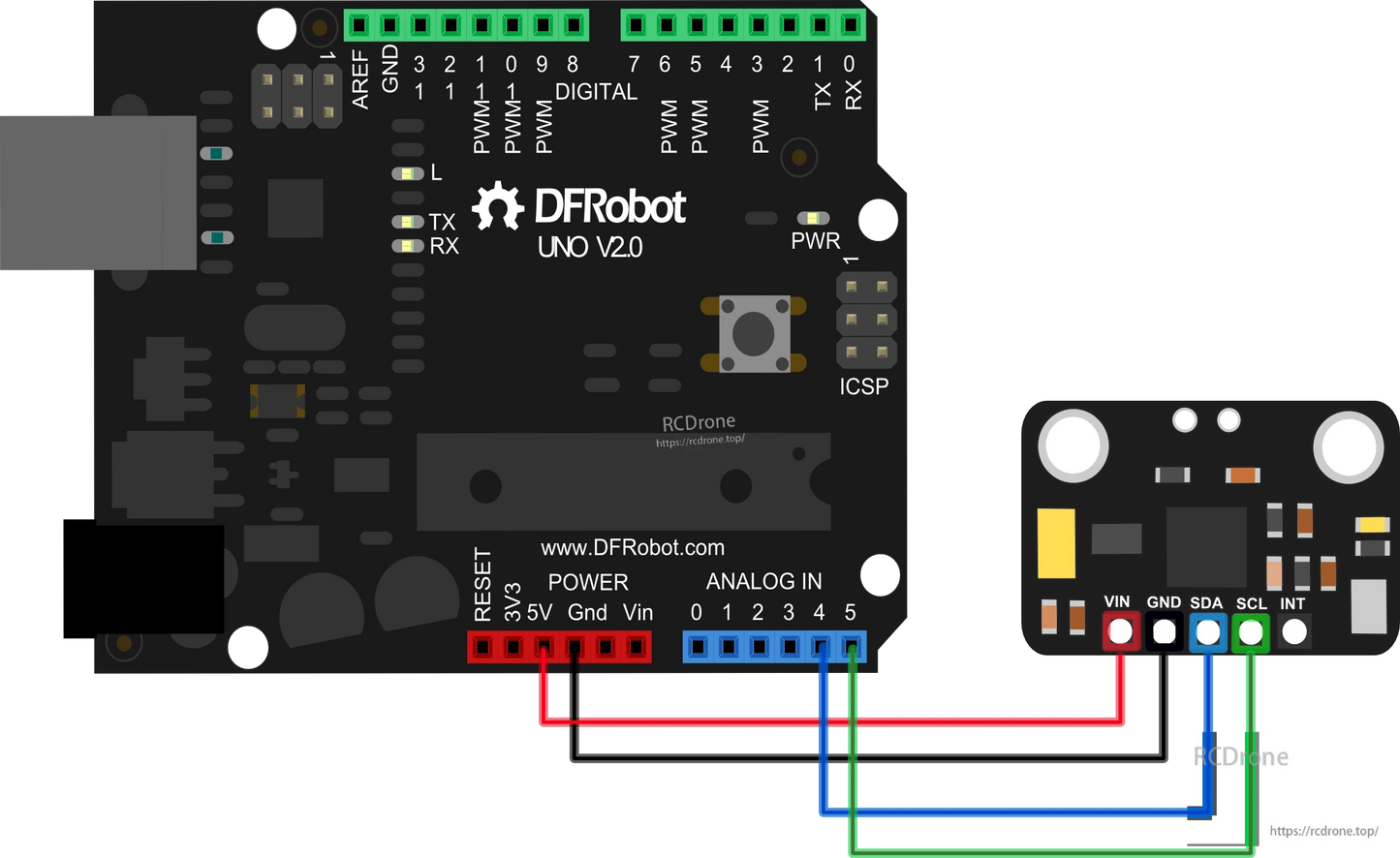
DFRobot SEN0142 MPU6050 6 DOF IMU 모듈은 3축 자이로스코프와 3축 가속도계를 단일 칩에 통합하여 로봇, 드론, 웨어러블 장치 및 아두이노 프로젝트를 위한 정확한 모션 센싱을 제공합니다. 디지털 모션 프로세서(DMP)를 특징으로 하여 고급 6축 및 9축 모션 퓨전 알고리즘을 지원하며, 쿼터니언, 오일러 각도 및 원시 센서 데이터 출력을 가능하게 합니다. 3V–5V의 넓은 입력 전압 범위를 갖춘 MPU6050은 아두이노 및 기타 마이크로컨트롤러에 직접 연결되어 실시간 모션 추적 및 제스처 감지를 수행할 수 있습니다.
주요 특징
-
하나의 칩에 3축 자이로스코프와 3축 가속도계를 결합
-
프로그래머블 가속도계 범위: ±2g, ±4g, ±8g, ±16g
-
자이로스코프 감도: ±250, ±500, ±1000, ±2000 dps
-
온보드 모션퓨전 및 제스처 인식을 위한 디지털 모션 프로세서 (DMP)
-
I2C 디지털 인터페이스는 매트릭스, 쿼터니언, 오일러 및 원시 데이터 형식을 지원
-
정확성을 향상시키기 위한 내장 바이어스 &앰프 및 나침반 보정
-
Arduino 및 웨어러블 전자기기와 호환 가능 I2Cdevlib을 통해
사양
-
작동 전압: 3–5 V
출력: I2C 디지털 (6/9축 모션퓨전 데이터)
-
가속도계: ±2g / ±4g / ±8g / ±16g 프로그래머블 범위
-
자이로스코프: ±250 / ±500 / ±1000 / ±2000 dps 감도
-
데이터 형식: 회전 행렬, 쿼터니언, 오일러 각, 원시 데이터
-
치수: 14 × 21 mm
응용 프로그램
-
로봇 모션 감지
-
아두이노 &및 DIY 전자 프로젝트
-
인간-컴퓨터 상호작용 (HCI)
-
웨어러블 장치 및 제스처 제어
-
내비게이션 및 균형 시스템 (e.g., 세그웨이형 수송기)
-
드론 안정화 및 모션 추적
세부사항



샘플 코드
먼저 모든 IMU 센서를 위한 라이브러리를 다운로드해 주세요!




- 선택을 누르면 전체 페이지가 새로 고쳐집니다.
- 새 창에서 열립니다.