


BETAFPV F4 2-3S 20A AIO 비행 컨트롤러 V1, 시리얼 ELRS 2.4G, 9V/5V BEC, DJI O3 6-핀 PMU
BETAFPV F4 2-3S 20A AIO 비행 컨트롤러 V1, 시리얼 ELRS 2.4G, 9V/5V BEC, DJI O3 6-핀 PMU
BETAFPV
정가
$81.99 USD
정가
할인가
$81.99 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
주요 특징
- 입력 전압: 2-3S
- 듀얼 BEC 출력: 9V@2A (DJI O3) 및 5V@3A (외부 장치)
- HD VTX 설치를 용이하게 하는 DJI O3 6핀 PMU (커넥터에 대한 납땜 없음)
- 내장 ESC: 20A 지속, 25A 피크; 신호 지원 D-shot300 / D-shot600
- MCU: STM32F405RGT6 @ 168MHz
- 온보드 수신기: Serial ELRS 2.4G (CRSF 프로토콜)
- IMU (SPI): ICM42688P / ICM42605 (그래픽 노트에 “@8K” 표시됨)
- 16MB 블랙박스; 기압계; 전압 & 전류 감지
- USB 포트가 후면으로 이동됨 (SH1.0 4핀)
- UART3는 해제할 수 있으며 (TX3/RX3) 온보드 RX 전원은 아래에 설명된 하드웨어 수정으로 차단할 수 있음
사양
| 무게 | 5.58g (모터 커넥터 및 전원 케이블 제외); 5.92g (모터 커넥터 포함) |
| 장착 홀 크기 | 26mm x 26mm |
| CPU | STM32F405RGT6 (168MHz) |
| 6축 IMU (SPI) | ICM42688P / ICM42605 |
| 수신기 (RX) | 직렬 ELRS 2.4G 수신기 |
| RX 펌웨어 버전 | BETAFPV AIO 2400 RX ELRS V3.3.0 |
| 안테나 | 에나멜 와이어 |
| 블랙박스 메모리 | 16MB |
| 센서 | 기압계 (BMP280 / DSP310); 전압 & 전류 |
| 5V BEC | 5V 3A@8V supply * |
| 9V BEC | 9V 2A@8V supply * |
| USB 포트 | SH1.0 4핀 |
| 내장 ESC 전류 | 20A 지속; 피크 25A |
| ESC 입력 전압 | 2-3S |
| FC 펌웨어 버전 | Betaflight_4.4.1_BETAFPVF405 |
| ESC 펌웨어 | C_X_70_48_V0.19.2.hex (BB51 블루제이 하드웨어) |
| ESC 신호 지원 | D-shot300, D-shot600 |
* BEC의 출력 전류는 온도가 상승함에 따라 감소합니다.
배선 / 핀 배치 하이라이트 (보드 다이어그램에서)
- 배터리 패드: Batt+ (2-3S), Batt-
- HD 디지털 VTX 포트 (커넥터); VCC 주의 사항: 9V (기본) / 5V
- I2C 패드: SCL, SDA
- UART 패드 표시: T1/R1, T6/R6, TX3/RX3, TX4/RX4; SBUS 패드도 표시됨
- 버저 패드: BUZZ+ 및 BUZZ-; LED 패드 표시됨
- 기압계 마킹: BMP280/DSP310
- 수신기 관련 마킹 표시: SX1280/SX1281, ESP8285, WiFi 안테나, RX LED (녹색), FC LED (파란색)
- 하단 다이어그램 마킹: FC/수신기 부트 버튼, RGB LED 1 / RGB LED 2, 5V BEC, 온보드 전류 센서
- 하단 다이어그램에 표시된 USB 패드: D-, D+, GND, USB 5V
- 하단 다이어그램에 표시된 ESC MCU 마킹: EFM8BB51 (FW C_X_70); ESC 영역 주위에 “20A MOS” 표시됨; ESC1/ESC2/ESC3/ESC4 레이블
설정 노트 (배선 그래픽에 표시된 텍스트)
- HD 디지털 VTX의 경우, UART4는 Configuration/MSP가 활성화되어야 합니다.
- 외부 수신기를 사용하는 경우, UART1/6을 직렬 RX로 설정하도록 구성하십시오.
- GPS: UART1/6에서 센서 입력을 “GPS”로 설정한 다음, GPS 탭에서 GPS를 활성화하고 GPS 모듈에 대한 올바른 프로토콜을 선택하십시오.
- SBUS 프로토콜 RX: 수신기 모드를 “직렬 기반 수신기”로 설정하고 직렬 수신기 공급자를 “SBUS”로 설정하십시오.
- CRSF 프로토콜 RX: 수신기 모드를 “직렬 기반 수신기”로 설정하고 직렬 수신기 공급자를 “CRSF”로 설정하십시오.
- HD 디지털 VTX 예시: Caddx Vista / Runcam Link VTX, Walksnail VTX, HDZero VTX.
- SBUS 프로토콜 RX 예시: Frsky XM+ / Futaba AC900 / Flysky RX2A Pro.
- CRSF 프로토콜 RX 예시: TBS Nano / ELRS 시리즈 RX.
- 참고: 일부 HD 디지털 VTX 장치는 통합 SBUS 수신기를 포함할 수 있습니다(디제이아이 라디오와 호환됨). 외부 수신기를 사용할 때, 디지털 VTX에 SBUS 배선이 필요하지 않을 수 있습니다.
자주 묻는 질문 / 하드웨어 옵션
- 전원 차단: 칩 비드를 제거하면 전원 공급이 차단됩니다. 온보드 ELRS 수신기를 재사용하려면, 전원 복원을 위해 납땜 패드를 함께 납땜하십시오.
- UART3 해제: 납땜 패드에서 두 개의 저항기를 제거하면 UART3가 해제됩니다 (왼쪽: TX3, 오른쪽: RX3). 재연결하려면 온보드 ELRS 수신기를 재사용할 때 납땜 패드를 함께 납땜하십시오.
- 전압 스위치 (HD VTX 커넥터): HD VTX 커넥터의 기본 전압은 9V입니다. WalkSnail Avatar HD mini 1s 및 Lite를 사용하려면, 칩 비드를 9V 위치에서 5V 위치로 이동시켜 전원 공급이 5V인지 확인하십시오 (또는 5V와 9V 패드 간 전환을 위해 칩 비드 대신 납땜을 사용하십시오).
- 모터 선택 주의: 20,000KV 이상의 모터는 피하십시오.
펌웨어 / 다운로드
빌드, 배선 또는 펌웨어 질문이 있는 경우 https://rcdrone.top/ 또는 [email protected].
- FC 펌웨어 (STM32F405 버전): Betaflight_4.4.1_BETAFVF405
- 펌웨어 & CLI 덤프 다운로드: https://support.betafpv.com/hc/en-us/articles/21884915967513-CLI-for-F4-2-3S-20A-Flight-Controller-ELRS-V1-0-
- Betaflight 4.4.1 릴리스: https://github.com/betaflight/betaflight/releases/tag/4.4.1
ESC 펌웨어 노트
- Bluejay ESC 펌웨어가 포함된 BLHeliSuite16714903 기반의 BB51 ESC 솔루션.
- Betaflight에서 양방향 D-shot 및 RPM 필터링을 지원합니다.
- PWM 주파수 옵션: 24kHz, 48kHz, 96kHz; 기본 공장 설정: 48kHz.
- 제공된 노트에서는 모터 유휴 설정 문제로 인해 96kHz를 권장하지 않습니다.
- 제공된 경고: 짧은 간격으로 펌웨어를 플래시하지 마십시오. 이는 비행 컨트롤러의 정지 및 손상을 초래할 수 있습니다.
- ESC-Configurator: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Bluejay 펌웨어 릴리스: https://github.com/bird-sanctuary/bluejay/releases (참고: 선택 C_X_70.HEX)
직렬 ELRS 2.4G RX (바인딩 & 업데이트 노트)
- 수신기와 비행 컨트롤러 간에 CRSF 프로토콜을 사용합니다.
- 전원을 켜고 끄기를 세 번 반복하여 바인딩 상태를 입력합니다 (비행 컨트롤러를 세 번 연결하고 분리합니다).
- 바인드 모드 표시: RX LED 빠른 더블 블링크; 바인드됨: 고정된 빛.
- 수신기 업데이트 방법: Wi-Fi 또는 Betaflight 직렬 패스스루.
- 패스스루 업데이트 노트: FC를 컴퓨터에 연결하고 Betaflight Configurator에 연결하지 마십시오; 대상 “BETAFPV 2.4GHz AIO RX”를 선택하십시오; ExpressLRS Configurator에서 Betaflight Passthrough를 사용하여 플래시하십시오.
- 펌웨어 플래싱 가이드: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
포함된 항목
- 1 x F4 2-3S 20A AIO FC V1
- 4 x M2*10 기계 나사
- 4 x M2*10 나일론 나사
- 4 x M2 너트
- 4 x 충격 흡수 볼
- 4 x JST1.25mm 각 소켓
- 4 x JST1.25mm 직선 소켓
- 1 x SH1.0 4핀 어댑터 케이블
- 1 x Type-C to SH1.0 어댑터
- 1 x XT30 전원 케이블
- 1 x 필터 커패시터
- 1 x 30mm 더블 헤드 VTX 커넥터 와이어
- 1 x 60mm 싱글 헤드 VTX 커넥터 와이어
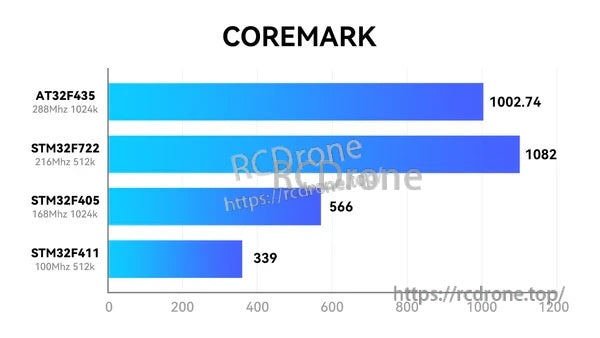
참고 (제품 그래픽에 표시된 CoreMark 차트)
| AT32F435 (288MHz 1024k) | 1002.74 |
| STM32F722 (216MHz 512k) | 1082 |
| STM32F405 (168MHz 1024k) | 566 |
| STM32F411 (100MHz 512k) | 339 |
상세정보

HD 우프 스타일 빌드를 위한 20A ESC와 F4 비행 컨트롤러를 결합한 컴팩트한 2–3S AIO 솔루션입니다.

명확한 상단 패드 맵은 납땜 전에 DJI 디지털 VTX 커넥터, 배터리 패드, UART 및 버저/LED 연결을 식별하는 데 도움이 됩니다.
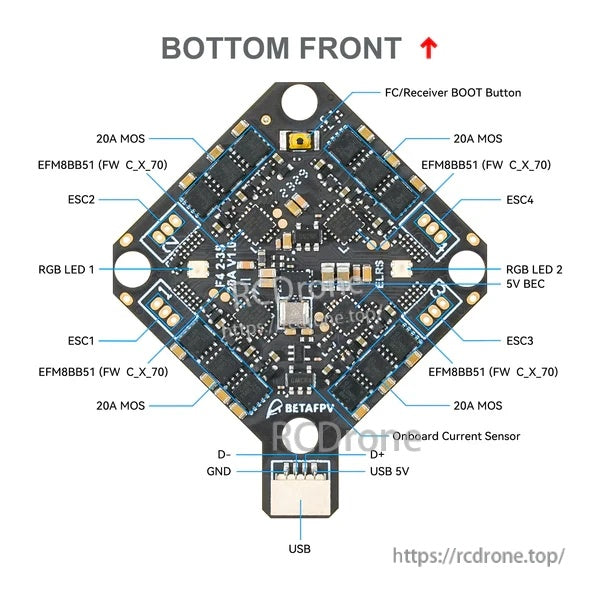
하단 레이아웃은 ESC 섹션, 부팅 버튼, RGB LED 패드, 온보드 전류 센서 및 USB 배선 포인트를 강조합니다.
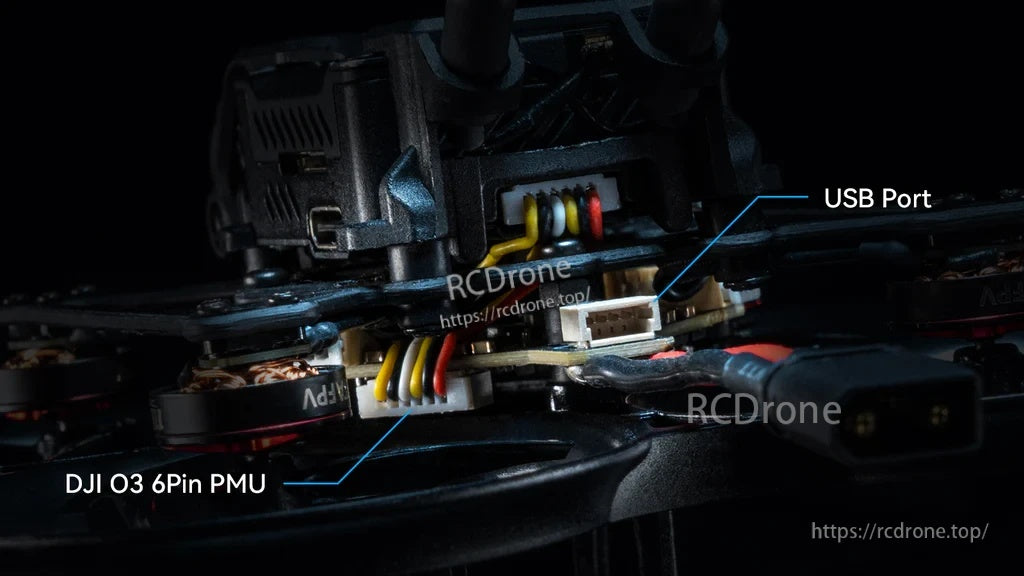
후면 장착 USB 포트와 DJI O3 PMU 커넥터는 컴팩트한 프레임에서 배선을 깔끔하게 유지합니다.


HD VTX 커넥터는 기본적으로 9V로 설정되어 있으며, 작은 납땜 변경을 통해 5V 옵션도 사용할 수 있습니다.

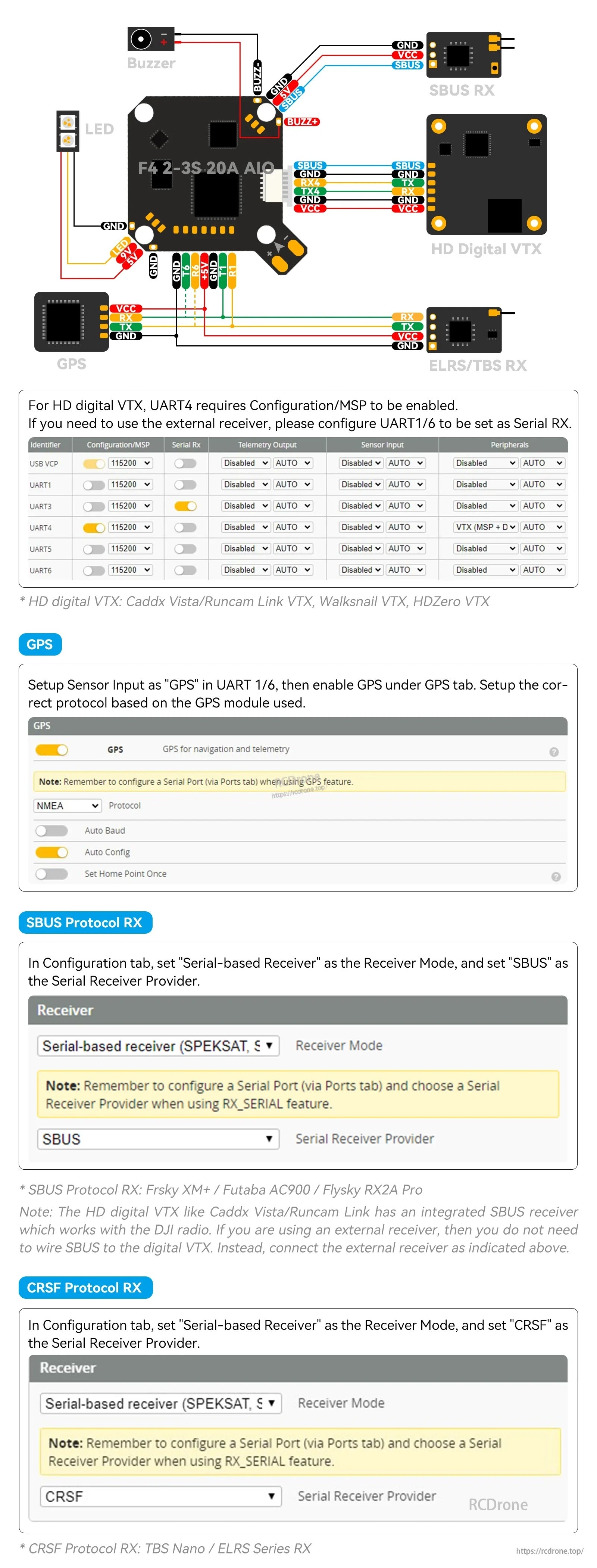
디지털 VTX 빌드 및 직렬 수신기 구성을 위한 설정을 간소화하는 배선 예제 및 Betaflight 수신기 설정 가이드.

Related Collections


