F450-4B Raspberry Pi 프로그래밍 가능 드론 개발 키트 - Pixhawk DIY Ardupilot 산업용 오픈 소스 드론 플랫폼
F450-4B Raspberry Pi 프로그래밍 가능 드론 개발 키트 - Pixhawk DIY Ardupilot 산업용 오픈 소스 드론 플랫폼
RCDrone
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
그만큼 F450-4B 라즈베리파이 드론 고급입니다 DIY 드론 키트 강력한 것을 결합합니다 라즈베리파이 4B 다재다능한 온보드 컴퓨터 Pixhawk 2.4.8 비행 컨트롤러, 이를 고도로 사용자 정의 가능하게 만들어줍니다. 프로그래밍 가능한 드론 플랫폼. 이 오픈소스 드론 플랫폼 다음과 같은 최첨단 도구를 지원합니다. 드론킷-파이썬개발자가 자율 미션, 실시간 데이터 전송 및 AI 기반 이미지 처리 애플리케이션을 만들 수 있도록 합니다. 견고한 450mm 프레임, 200MP HD 카메라, 최대 20분 비행을 위한 3S 5200mAh 배터리, 고도 유지, 귀환 및 원형 모드와 같은 고급 비행 모드를 갖춘 F450 드론 키트는 혁신적인 드론 개발 경험을 추구하는 애호가, 연구자 및 교육자에게 이상적인 선택입니다.
주요 특징
고성능 하드웨어
- 라즈베리파이 4B: 64비트 1.5GHz 쿼드코어 프로세서를 탑재하여 4K 비디오 출력과 고속 WiFi 통신을 지원하여 안정적인 작동을 보장합니다.
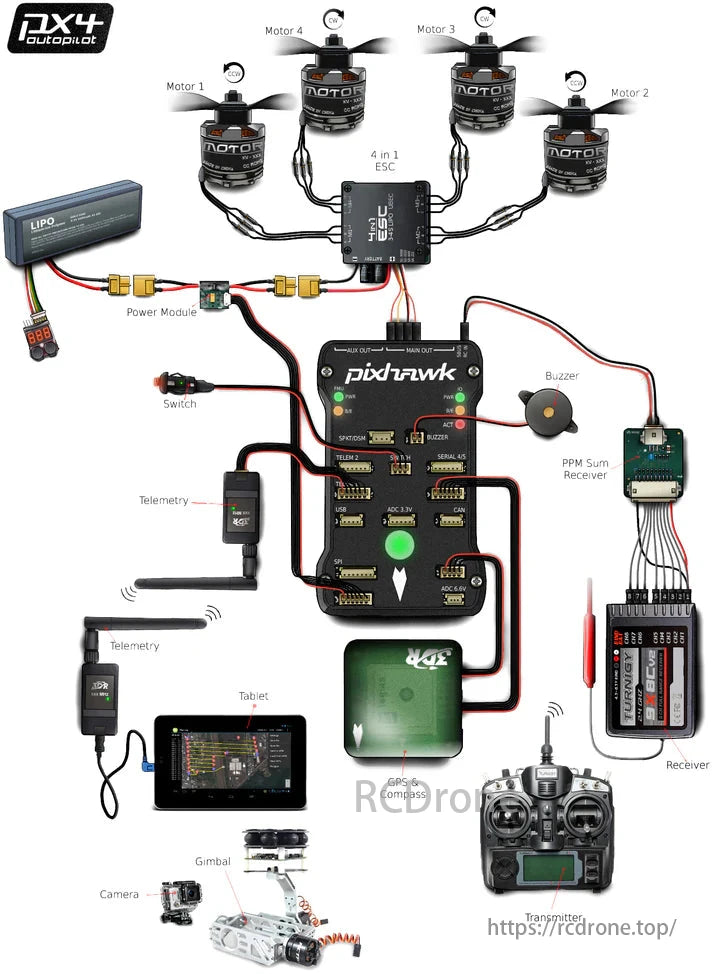
- Pixhawk 2.4.8 비행 컨트롤러: 여러 개의 통합 센서를 장착하여 정확한 자세 제어, 호버링, 임무 계획이 가능합니다.
- 비전 확장 지원: 단안 카메라와 OpenCV 도구와 함께 이 키트는 실시간 이미지 전송 및 처리 요구 사항을 충족합니다.
다양한 비행 모드
- 고도 유지(AltHold): 안정적인 비행 고도를 유지합니다.
- 호버: 정밀한 정지 호버링을 제공합니다.
- 홈으로 돌아가기 (Return): 신호가 끊어지거나 배터리가 부족하면 자동으로 시작 지점으로 돌아갑니다.
- 착륙(Land): 원활한 자율 착륙을 실행합니다.
- 안정화 모드: 비행 자세를 자동으로 조정합니다.
- 서클 모드: 타겟 주위를 원형 비행합니다.
- 헤드리스 모드: 방향 제약을 제거하여 제어를 더 쉽게 합니다.
- 제어 불능의 복귀: 신호가 끊어지면 사전 설정된 위치로 돌아갑니다.
- 저전력 착륙: 배터리가 부족한 상황에서도 안전하게 착륙합니다.
데이터 전송 및 이미지 처리
- 외부 라우터 없이도 내장된 핫스팟을 통해 로컬 WiFi 네트워크를 구축하여 실시간 데이터와 이미지 전송이 가능합니다.
- OpenCV 기반 비디오 스트리밍과 분석을 지원하므로 이미지 모니터링과 지능형 애플리케이션에 이상적입니다.
명세서
드론 매개변수
| 매개변수 | 세부 |
|---|---|
| 이름 | F450 드론 키트 |
| 휠베이스 | 450mm |
| 무게 | 1493g (배터리 및 Raspberry Pi 4B 포함) |
| 비행 컨트롤러 | 픽스호크 2.4.8 오픈소스 비행 컨트롤러 |
| 온보드 컴퓨터 | 라즈베리파이 4B |
| 카메라 | 200MP HD 1080P |
| 호버링 지원 | 옵티컬 플로우 모듈과 레이저 거리 센서 |
| GPS 모듈 | m8n GPS |
| 비행 시간 | ~20분 (환경 및 임무에 따라 다름) |
| 배터리 | 3S 5200mAh(11.1V) |
| 탑재량 용량 | 500g |
| 바람 저항 | 레벨 3-4 |
| 모터 | 서니스카이 A2212 |
| 키보드 | Hobbywing 20A ESC (3S-4S LiPo 배터리 지원) |
| 프로펠러 | T1045 셀프 잠금 프로펠러 |
| 최대 고도 | 2000m (간섭 없음) |
| 비행 범위 | 1000m |
| 비행 시나리오 | 실내/실외 |
Pixhawk 2.4.8 비행 컨트롤러 사양
- 프로세서: 32비트 ARM STM32F427 Cortex M4, 168MHz, 256KB RAM
- 센서:
- L3GD20 3축 6DOF 자이로스코프
- LSM303D 3축 14비트 가속도계/자기계
- MPU6000 6축 가속도계/자기계
- MS5611 고정밀 기압계
- 지상 제어 호환성: QGroundControl, MissionPlanner
- 치수: 81mm x 47mm x 16mm; 무게: 37g
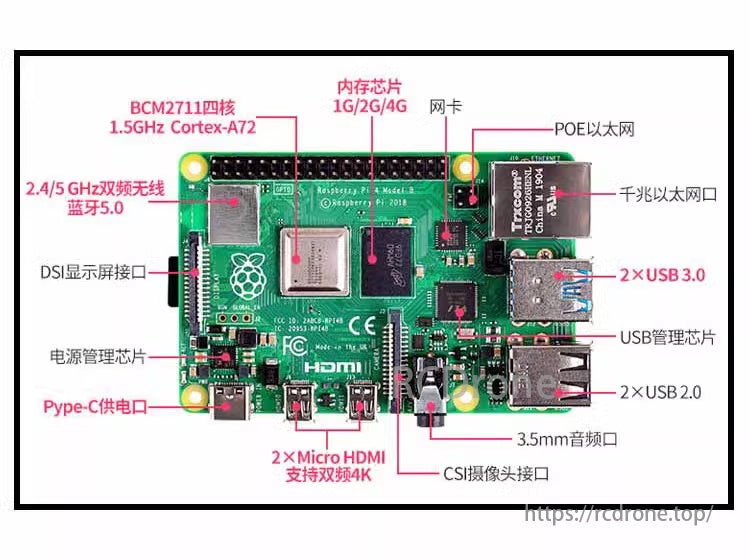
라즈베리파이 4B 사양
- 칩셋: 브로드컴 BCM2711
- CPU: 64비트 1.5GHz 쿼드코어
- 그래픽 카드: 500MHz 비디오 코어 VI
- 숫양: 4GB DDR4
- 인터페이스: USB 3.0 2개, USB 2.0 2개
- 비디오 출력: 듀얼 마이크로 HDMI 포트 지원 4K@60Hz
- 의사소통: 블루투스 5.0, WiFi 5(2.4/5GHz)
- 전원 공급 장치: USB 타입-C(5V 3A)
패키지 포함 사항
구성 1: FlySky i6 리모트 및 원격 측정 기능이 있는 SunnySky A2212 모터
- 랜딩기어가 장착된 F450 프레임
- SunnySky A2212 모터(4개)
- Hobbywing 20A ESC(4개)
- T1045 셀프락킹 프로펠러(4쌍)
- PIX M8n GPS 모듈
- 진동 감쇠판
- FlySky i6 리모트 컨트롤러
- 3S 5200mAh 배터리
- B3 밸런스 충전기
- GPS 마운트
- FS 전압 원격 측정 모듈

포함 사항: 배터리 스트랩, 나일론 케이블 타이, 나무 패드, 3M 접착 테이프, 부저, 설치 도구
조립 및 디버깅 비디오, 관련 자료 제공; 소스 코드에 대한 내용은 고객 서비스에 문의하세요.
구성 2: Radiolink PRO가 있는 SunnySky A2212 모터
- 랜딩기어가 장착된 F450 프레임
- SunnySky A2212 모터(4개)
- Hobbywing 20A ESC(4개)
- 9450 셀프락킹 프로펠러(3쌍)
- 사진M8n GPS 모듈 키트
- 진동 감쇠판
- Radiolink PRO(R9DS 수신기)
- 3S 2200mAh 제어 배터리
- 3S 5200mAh 배터리
- B3 밸런스 충전기
- GPS 마운트

포함 사항: 배터리 스트랩, 나일론 케이블 타이, 나무 패드, 3M 접착 테이프, 부저, 설치 도구
조립 및 디버깅 비디오, 관련 자료 제공; 소스 코드에 대한 내용은 고객 서비스에 문의하세요.
F450 드론 키트 조립
응용 프로그램 시나리오
F450-4B 드론 개발 키트는 다음에 적합합니다.
- 드론 연구개발: 대학 연구, 비행 제어 장치 테스트, 알고리즘 개발.
- 지능형 애플리케이션: 경로 계획, 목표 인식, 장애물 회피.
- 교육 실험: 프로그래밍, 하드웨어 조립, 디버깅.
- 현장 사용: 실내 호버링, 실외 조사, 농업 모니터링 등.
세부
F450-4B 라즈베리파이 드론 개발 플랫폼
F450은 고전적이고 널리 사용되는 드론 모델로, 간단하고 편리한 조립, 높은 비용 성능, 뛰어난 실용성을 갖추고 있으며, 초보자가 드론 조작을 빠르게 시작하기에 적합합니다.

업그레이드된 Raspberry Pi 4B
Raspberry Pi 4B의 하드웨어 처리 능력은 3B+보다 훨씬 강력합니다.
Raspberry Pi에는 최신 오픈소스 시스템이 탑재되어 있습니다. 우분투 20.04Ubuntu Mate 시스템에 비해 더욱 매끄러운 환경을 제공합니다.

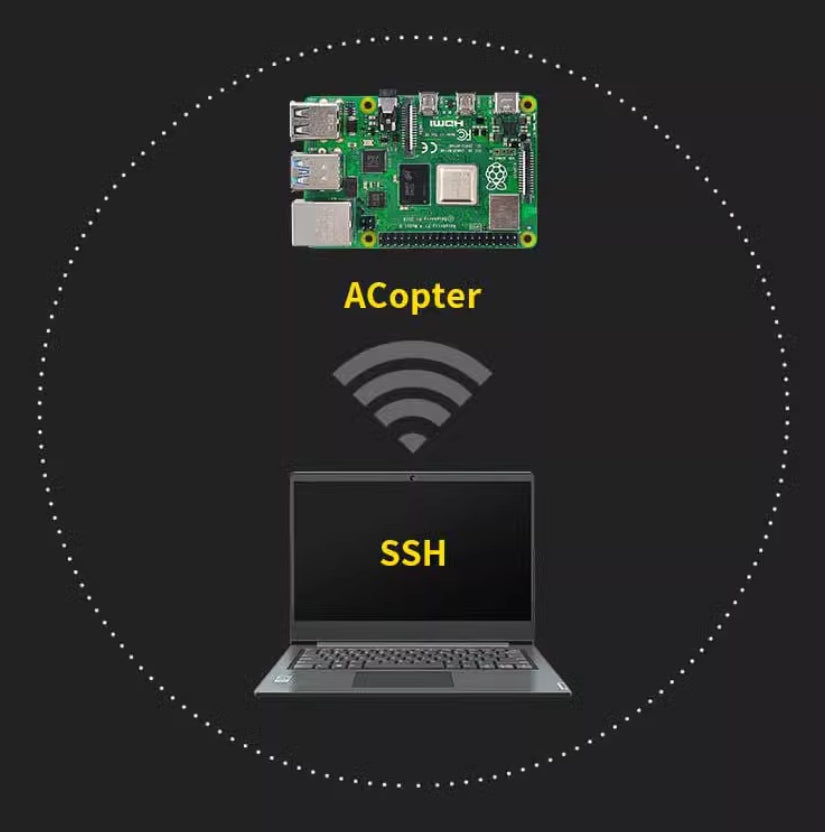
시스템 활성화 WiFi 핫스팟(Acopter)
Raspberry Pi 4B의 WiFi 기능을 사용하여 자체 구축 핫스팟(Acopter)이 생성됩니다. PC는 4B의 WiFi 핫스팟에 직접 연결하여 로컬 네트워크를 형성하고 SSH 명령을 사용하여 Raspberry Pi에 원격으로 액세스할 수 있습니다. 네트워크 구성을 위해 라우터가 필요한 3B+ 모델과 달리 이 설정은 초보자에게 훨씬 간단하고 사용하기 쉽습니다.
OpenCV 시각 처리
단안 카메라를 추가하여 이미지 전송 및 후처리가 가능합니다. 비디오 스트림은 Raspberry Pi를 통해 캡처하여 OpenCV와 같은 도구를 사용하여 처리할 수 있습니다. 실시간 HD 비디오 스트림은 처리를 위해 PC로 다시 전송하거나 보기 위해 모바일 기기로 전송할 수도 있습니다.

더 많은 확장 인터페이스
Raspberry Pi 4B는 듀얼 USB 3.0 포트, 듀얼 4K 마이크로 HDMI 포트, CSI 및 DSI 인터페이스, 기가비트 이더넷, Type-C 전원 공급 장치 등 광범위한 확장 인터페이스를 제공하여 다양한 애플리케이션에 뛰어난 다재다능함을 제공합니다.
싱글 카메라 에디션
단일 카메라 에디션에는 Raspberry Pi 4B와 단안 카메라가 포함되어 있어 비행 컨트롤러와 직렬 포트를 통해 통신할 수 있습니다. 시각적 처리, Python 프로그래밍 및 통신과 같은 작업을 지원합니다. 이 버전은 Pixhawk 사용 경험, Ubuntu(Linux), OpenCV, Raspberry Pi 및 로컬 영역 네트워크 통신에 대한 기본 지식이 있는 사용자에게 적합합니다.
기본 기능 외에도 단일 카메라 에디션은 WiFi를 통한 이미지 및 데이터 전송을 지원하며 드론을 제어할 수 있습니다. 드론킷-파이썬 프로그램 작성.

광학 흐름 위치 지정
광학 흐름 위치 지정 조건에서 Dronekit-python을 사용한 실내 호버링 제어

이 드론 개발 플랫폼은 다음을 지원합니다. 로오스, 파이썬 프로그래밍, OpenCV 이미지 인식, 4G 장거리 전송, 그리고 Aruco 2D 코드 시각 가이드 랜딩, 매우 다재다능하고 혁신적입니다.

FlySky i6 리모트 컨트롤러
10채널 펌웨어가 사전 로드된 ia6b 수신기와 전압 원격 측정 모듈을 갖추고 있으며, 1000m가 넘는 원격 제어 범위를 갖추고 있어 초보자가 배우고 연습하기에 이상적입니다.

Radiolink AT9S 조종기
2000m 이상의 제어 범위를 가진 10개 채널이 특징입니다. 배터리 전압, GPS 위성 수, 비행 고도, 좌표, 비행 모드 등에 대한 데이터를 제공하는 원격 측정 모듈이 장착되어 있습니다.

자주 묻는 질문
1. 2차 개발을 할 수 있나요? 독립적으로 프로그래밍할 수 있나요?
답은 '예'입니다. 앞서 소개했듯이 Ardupilot은 현재 가장 널리 사용되는 오픈소스 비행 제어 시스템이며, 이 시스템을 기반으로 많은 우수한 국내외 드론 모델이 개발되었습니다.
2차 개발은 주로 비행제어 개발과 외부 확장의 두 가지 방향으로 진행됩니다.
- 비행 제어 개발
우리는 Ardupilot을 사용하고 있으므로 오픈소스 비행 제어 개발을 배우려면 주로 Ardupilot 오픈소스 프로젝트를 공부해야 합니다.
- 뛰어난 프로그래밍 기술(소스 코드는 C++)과 고급 수학(이산 수학, 반복, 선형화), 칼만 필터링, 임베디드 개발에 대한 지식이 필요합니다.
- 탄탄한 이론적 기초가 필요합니다. 이를 통해 무인 시스템 개발 및 비행 제어 R&D에 대한 작업을 준비할 수 있습니다.
비행 제어 개발에 집중하고 싶다면 대부분의 작업은 컴퓨터에서 해야 합니다.
- 프로그래밍 환경 설정, 비행 제어 소스 코드 다운로드, 아키텍처 및 기능 모듈 연구 등.
- 코드 프레임워크에 익숙해지면 기존 코드를 기반으로 프로그래밍을 시작할 수 있습니다.
기본 비행 제어 모델부터 시작하고, 지침을 위해 당사에서 제공하는 Ardupilot 비행 제어 교과서를 참조하세요.
- 외부 확장 개발
외부 확장을 사용하면 비행 컨트롤러의 예약된 인터페이스를 통해 작업 및 시나리오에 따라 외부 장치를 추가할 수 있습니다. 예를 들어:
- 실내 위치 지정 및 호버링을 위한 광학 흐름 모듈을 추가합니다.
- 장애물 회피를 위해 레이저 레이더를 추가하세요.
- 원격 측정을 활용해 자율 비행 및 경로 계획을 실현하세요.
- 온보드 컴퓨터(예: Raspberry Pi)를 설치하고 Dronekit-Python 또는 ROS를 사용하여 드론 제어를 프로그래밍합니다.
온보드 컴퓨터를 추가하는 목적은 다음과 같은 보다 복잡한 작업을 처리하는 것입니다.
- Raspberry Pi 카메라를 사용하여 시각적 인식을 구현합니다(OpenCV, YOLO 등 필요).
- 드론 비행을 제어하기 위해 통신 프로토콜을 결합합니다.
- 네트워크를 통해 비행 데이터나 고화질 비디오를 전송합니다.
이러한 기능은 비행 컨트롤러에만 의존해서 달성될 수 없습니다.
외부 확장에 대한 연구는 주로 응용 분야에 초점을 두고 있으며, 이는 전국의 대부분 대회의 방향이기도 합니다.학습 후에는 시각적 인식, 드론과 AI 통합 등 지능형 드론의 중요 분야를 탐색할 수 있습니다.
2. 독자적인 개발을 위한 전제 조건은 무엇입니까?
드론에 대한 학습은 점진적인 과정입니다. 드론 시스템은 학제적이고 통합적이며 광범위한 지식 영역을 포함합니다. 드론 개발을 배우려면 다음과 같은 기초가 필요합니다.
- 납땜 인두, 다양한 드라이버 및 기타 도구를 사용하는 데 능숙한 기술을 포함한 기본적인 실습 기술.
- 전자공학의 기본 지식: 전압, 전류, 전력, 극성, 신호와 같은 개념.
- 자동화 제어의 기본 지식: PID 제어, 피드백, 디지털 신호, 아날로그 신호 등
- 기본적인 컴퓨터 기술: 드라이버, 직렬 포트, 통신 속도, 펌웨어 버전, 소프트웨어 버전.
- Pixhawk 드론에 대한 기본 지식.
- 우분투 운영체제에 대한 기본 지식.
- 프로그래밍 언어 능력: C++, Python 등.
Respberry PI 드론을 만드는 방법?