






Feetech SCS20 - 6V 20kg.cm 360 학위 자기 코드 직렬 제어 TTL 서보 20kg scs 서보 버스 패킷 통신
Feetech SCS20 - 6V 20kg.cm 360 학위 자기 코드 직렬 제어 TTL 서보 20kg scs 서보 버스 패킷 통신
Feetech
픽업 사용 가능 여부를 로드할 수 없습니다.
사양
브랜드명: 피테크
원산지: 중국 본토
재질: 플라스틱
플라스틱 유형: PC
RC 부품 및 액세서리: 배터리 - LiPo
크기: 10*10*10
차량 종류: 자동차
용도: 차량 및 원격 조종 장난감
부품/액세서리 업그레이드: 리튬 배터리
원격 제어 주변기기/장치: 원격 컨트롤러
도구 소모품: 배터리
수량: 1개
기술적 매개변수: KV1100
모델 번호: SCS20-360T
사륜구동 속성: 모터
휠베이스: 나사
모델 번호: STS3020
크기: 40 X 20 X 40.5mm
무게: 62g
기어 유형: 구리 및 알루미늄
각도 제한: 제한 없음
베어링: 볼 베어링 2개
혼 기어 스플라인: 25T(4.96mm)
모터: 금속 브러시 모터
작동 전압 범위: 6-7.4V
피크 실속 토크: 20kg.cm@6V
정격 토크: 6.6kg.cm@6V
프로토콜 유형: 반이중 비동기 직렬 통신
케이스: 알루미늄 및 플라스틱
|
1.환경 조건 적용 4-1 유휴 전류(정지 시) 10mA 10mA
전자 제어 기능:
1.가속 시작 정지 기능: 속도 및 가속도 값을 설정할 수 있으며 모션 효과가 더 부드럽습니다. 2.고정밀, 360도 절대 위치 4096비트 정밀도, 최고 위치 분해능은 0.088도, 제어가 90도인 경우 4096 / 360 * 90 = 1024를 입력하고, 제어가 180도인 경우, 4096 / 360 * 180 = 2048을 입력하여 계산합니다. 3.네 가지 작업 모드 전환이 있습니다(모드 0 위치 서보, 모드 1 속도 폐쇄 루프, 모드 2 속도 개방 루프, 모드 3). 단계 서보). 1)、모드 0: 위치 모드, 기본 모드. 이 모드에서는 360도 절대 각도 제어가 실현될 수 있습니다. 가속 이동을 지원합니다. 2), 모드 1: 속도 폐쇄 루프, 프로그래밍 인터페이스에서 작동 모드는 1로 설정되고 속도 폐쇄 루프 모드로 전환되며 속도 열에 해당 속도를 입력하여 실행합니다. . 3)、모드 2: 속도 개 루프, 프로그래밍 인터페이스에서 작동 모드는 2로 설정되고 속도 개 루프 모드로 전환되며 실행 시간 열에 해당 시간을 입력합니다. 4), 모드3: 단계 모드: 프로그래밍 인터페이스에서 최대/최소 각도 제한은 0으로 설정되고 작동 모드는 3으로 설정됩니다. 단계 모드로 전환합니다. 목표 위치를 향해 나아가려면 포지션 바에 위치를 입력하세요. 동일한 방향으로 계속 진행하려면 위치를 다시 클릭하십시오. 4、다회전 모드, 360도 절대 제어 및 피드백, 최고 정확도에서 절대 위치 제어는 플러스 또는 마이너스 7회전이 될 수 있지만 전원 사이클 횟수는 저장되지 않으며 절대 위치 피드백 값만 유지됩니다. 5、원 키 교정, 모든 위치에 360도 각도 설치, (40(십진수) 주소 입력 128(십진수)) 하나의 키 수정 현재 위치는 중간(2048(십진수))입니다. 6, TTL 통신 레벨, 반이중 비동기 통신, 읽기 및 쓰기 매개변수를 조정하는 버스 프로토콜 지원, 동기 읽기 기능 추가(전송 버스의 각 서보에서 다시 읽기 명령을 수신하는 명령입니다.) 7、다중 보호, (과부하, 과전류, 과전압, 과열, 스위치 설정, 조건 매개변수 변경) 1) 과부하 보호: 위치 감지를 통해 시작 위치에서 목표 위치로 이동하는 동안 장애물 차단 후 현재 위치가 목표 위치가 아닌 것으로 감지되면 언로드 힘이 2S(20%) 동안 지속됩니다. 기본 차단력). 새 명령이 트리거될 때까지 보호 해제 2), 과전류 보호: 설정된 전류 값을 통해 전류가 설정된 전류 값에 도달하는지 확인합니다. 설정된 현재 값에 도달하면 힘을 해제합니다(기본 토크는 0입니다). 새로운 명령이 트리거될 때까지 보호 해제 3), 과전압 보호: 현재 전압 값을 감지합니다. 설정된 전압 값을 초과하면 알람이 과전압을 표시합니다. 4), 과열 보호: 현재 모터 온도를 감지합니다. 온도가 설정 값을 초과하면 경보가 과열로 표시됩니다. 8: 다중 피드백: 1)부하 피드백: 전류 제어 출력은 모터의 전압 듀티 사이클을 구동하고 전체 범위는 1000 = 100% 토크 출력입니다. 2)전류 피드백: 서보 작동 전류, 1 = 6.5mA 3)전압 피드백: 서보 작동 전압,70=7V,0.1V 4)온도 피드백: 현재 서보의 내부 작동 온도(온도 측정)。 5)속도 피드백: 현재 모터 회전 속도 및 단위 시간(초당)의 단계 수 피드백 9、PID 매개변수 열기. |




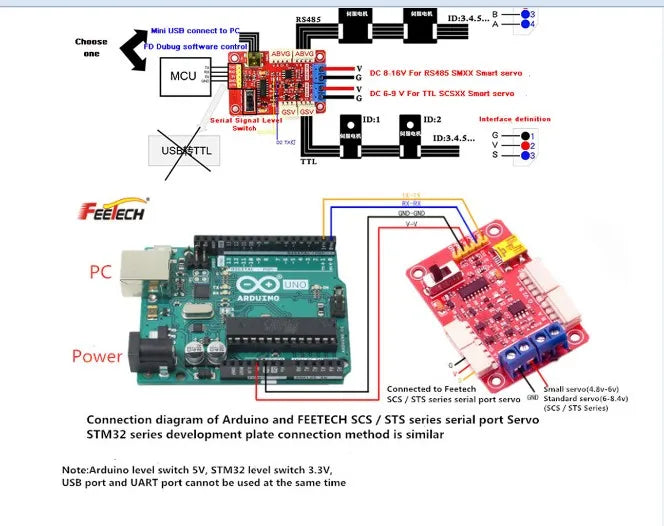
>hmni USB unmChu Chontc Dubuq ior contfo A8-zi DC R I6y Fr RSRS Shr Smuc] >hrtu MCU DC EBYFor ECsX Smor keno 5eal 6i00.
Related Collections






