




Foxeer M10Q-120 V2 GPS 모듈 U-Blox M10050, IST8310 나침반, 듀얼 프로토콜, 72채널, 1.5m 정확도, FPV 레이싱 및 장거리 드론용
Foxeer M10Q-120 V2 GPS 모듈 U-Blox M10050, IST8310 나침반, 듀얼 프로토콜, 72채널, 1.5m 정확도, FPV 레이싱 및 장거리 드론용
Foxeer
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Foxeer M10Q-120 V2 GPS는 FPV 드론 및 UAV 애플리케이션을 위해 설계된 고성능의 컴팩트한 GPS 모듈입니다. 10세대 U-Blox M10050 칩으로 구동되며, 빠른 위치 결정, 정밀한 내비게이션 및 이중 프로토콜 호환성을 제공합니다. 통합된 IST8310 나침반, 다중 별자리 지원(GPS, GLONASS, BDS, GALILEO, QZSS, SBAS) 및 내장 배터리를 통해 동적 환경에서도 안정적이고 신뢰할 수 있는 작동을 보장합니다.
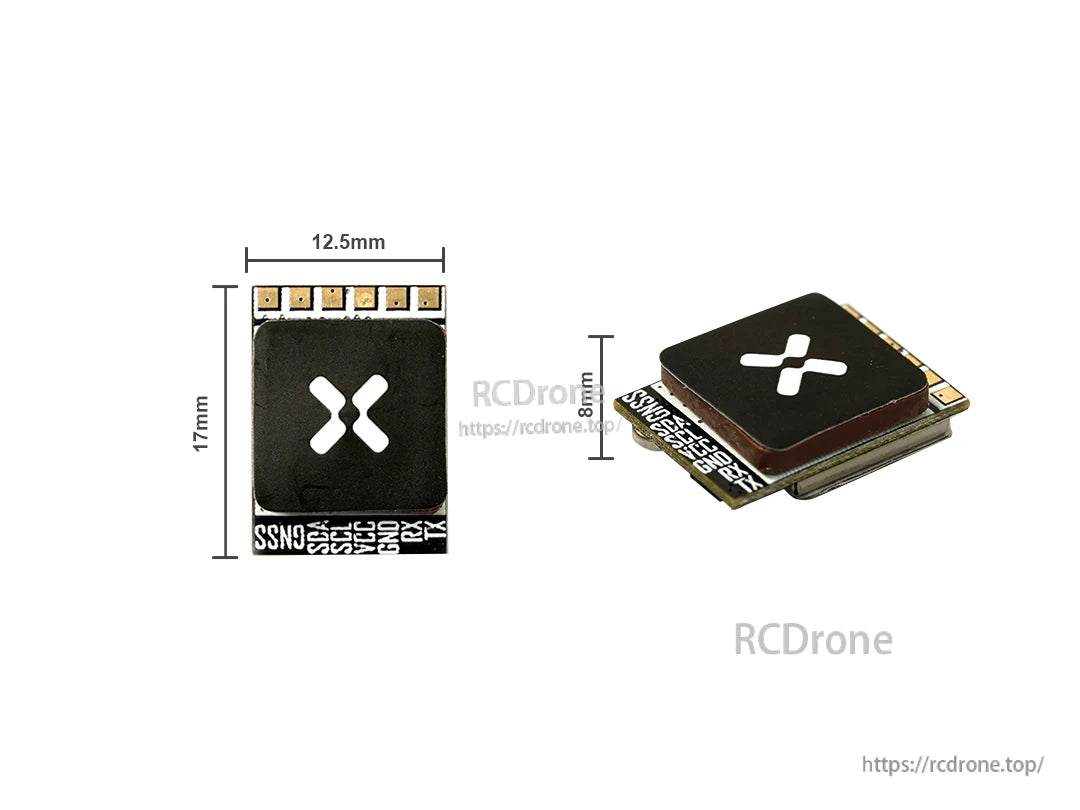
크기는 12.5 × 17 × 5 mm이고 무게는 2.7 g인 이 GPS 장치는 경량 빌드를 최적화하면서도 2D ACC 1.5 m의 뛰어난 정확도와 0.05 m/s의 속도 정확도를 제공하여 FPV 레이싱, 프리스타일 및 장거리 드론에 적합합니다.
html주요 특징
-
U-Blox M10050 10세대 칩 초고속 위치 측정을 위한
-
GPS + GLONASS + BDS + GALILEO + QZSS + SBAS 다중 시스템 호환성
-
IST8310 전자 나침반 정확한 방향성을 위한
-
이중 프로토콜 (NMEA/UBLOX) 유연한 통합을 위한
-
72개의 추적 채널 내장 세라믹 안테나와 함께
-
LED 상태 표시기 전원 및 위치 정확성을 위한
-
컴팩트 &및 경량 디자인 (12.5 × 17 × 5 mm, 2. 7 g)
-
Betaflight &및 OSD 지원으로 원활한 FPV 통합
사양
| 매개변수 | 세부사항 |
|---|---|
| 칩 | M10 (10세대 U-Blox M10050) |
| 주파수 | GPS L1, GLONASS L1, BDS B1, GALILEO, SBAS L1, QZSS L1 |
| 입력 전압 | 5V |
| 안테나 | 세라믹 안테나 |
| 채널 | 72 |
| 배터리 | 내장형 |
| 나침반 | IST8310 |
| 나침반 방향 | 플러그는 비행 방향을 향하고, 안테나는 위로 향해야 하며, Betaflight: CW 90° 플립 |
| 전송 속도 | 115200 bps |
| 프로토콜 | 듀얼 NMEA/UBLOX |
| 출력 주파수 | 1 Hz – 10 Hz (기본값 10 Hz) |
| 속도 정확도 | 0.05 m/s |
| 수평 위치 정확도 | 2D ACC 1.5 m (실외) |
| 수신기 감도 | 추적: -166 dBm; 캡처: -160 dBm |
| 동적 특성 | 높이 50,000 m; 속도 500 m/s; 가속도 4G |
| 작동 온도 | -40 °C ~ +85 °C |
| 저장 온도 | -40 °C ~ +105 °C |
| 무게 | 2.7 g |
| 크기 | 12.5 × 17 × 5 mm |
응용 프로그램
-
FPV 레이싱 드론
-
장거리 UAV
-
프리스타일 쿼드콥터
-
측량 &및 매핑 드론
-
정밀 GPS가 필요한 RC 항공기
세부사항

Foxeer M10Q-120 V2 GPS는 U-Blox M10050을 사용하며, GPS+GLONASS+BDS를 지원하고, IST8310 나침반, 이중 NMEA/UBLOX 프로토콜을 포함하며, 정밀한 위치 지정을 위해 1.5m 2D 정확도를 제공합니다.

Foxeer M10Q-120 V2 이중 프로토콜 IST8310 나침반 NMEA/UBLOX

Foxeer M10Q-120 V2 GPS 모듈; PPS LED 녹색은 전원이 켜져 있고 위치 정확도를 지속적이거나 깜박이는 빛으로 나타냅니다.
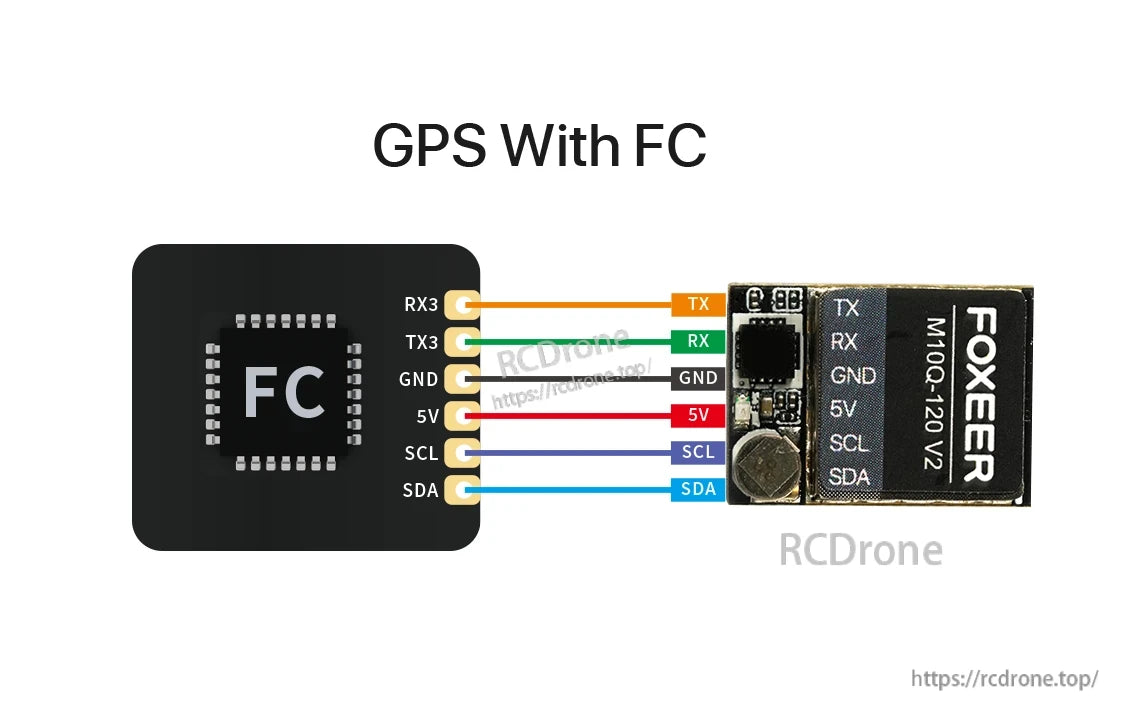
Foxeer M10Q-120 V2 GPS는 TX, RX, GND, 5V, SCL, SDA 핀을 통해 FC에 연결됩니다.
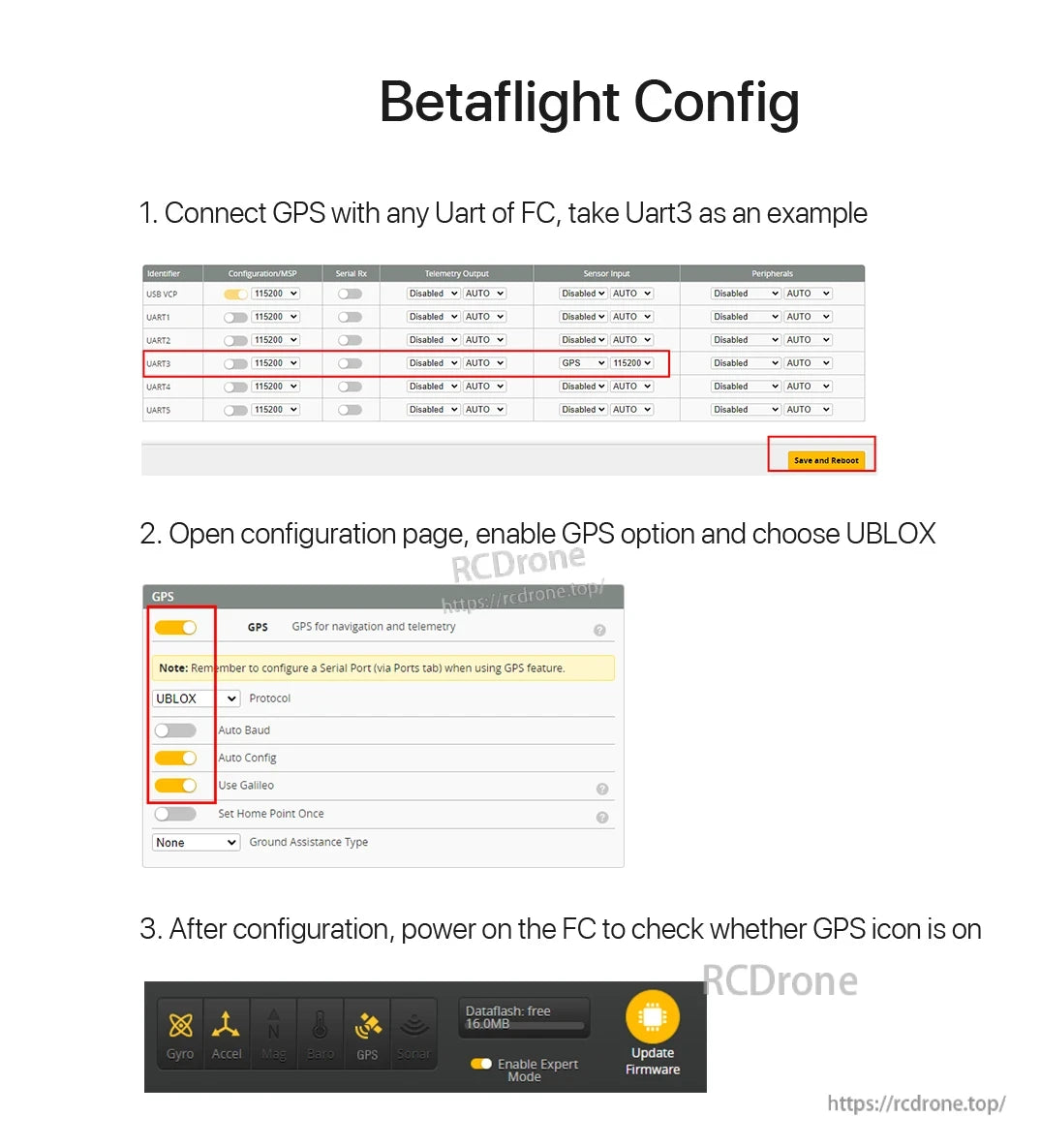
Betaflight에서 GPS 구성: UART3에 연결하고, UBLOX 프로토콜로 GPS를 활성화하며, 자동 전송 속도 및 구성을 설정하고, Galileo를 사용합니다. 저장 후 재부팅하고 비행 컨트롤러 전원을 켠 후 GPS 아이콘이 활성화되었는지 확인합니다.
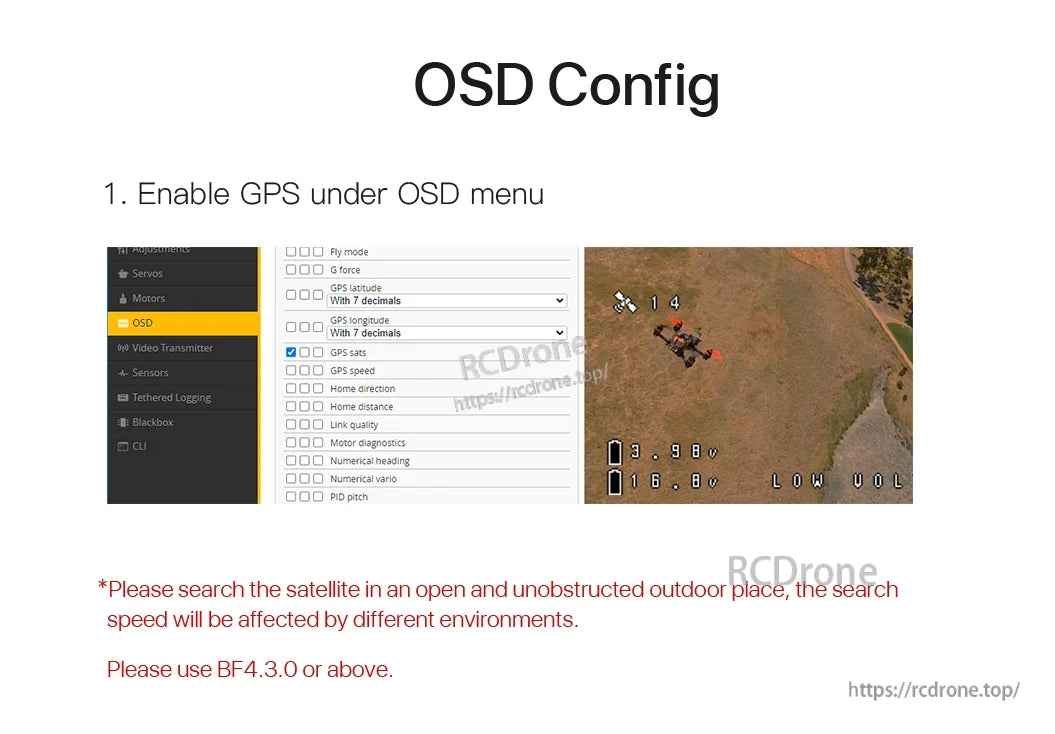
OSD 구성: OSD 메뉴에서 GPS를 활성화합니다. GPS 위성, 속도, 방향, 거리 및 기타 옵션을 선택합니다. 최상의 결과를 위해 야외에서 위성을 검색합니다. BF4.3.0 이상의 펌웨어를 사용하세요.




