

고토크 HTDW-4438-30-NE 모터, 30:1 감속기, 정격 2Nm, 45RPM, 12-48V, 14비트 엔코더
고토크 HTDW-4438-30-NE 모터, 30:1 감속기, 정격 2Nm, 45RPM, 12-48V, 14비트 엔코더
HIGH TORQUE
정가
$306.00 USD
정가
할인가
$306.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
고토크 HTDW-4438-30-NE 모터는 30배 감속비를 가진 컴팩트한 고토크 모터 모듈로, 통합 인코더 피드백(14비트 입력 및 14비트 출력)과 로봇 관절 및 모션 모듈에 적합한 속도/위치 제어 관련 성능 매개변수를 제공합니다. 기술 지원 및 사전 판매 질문은 [email protected] or 에 문의하시기 바랍니다. https://rcdrone.top/.
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
주요 특징
- 모델: HTDW-4438-30-NE (고토크)
- 감속비: 30
- 듀얼 인코더 피드백: 14비트 입력 인코더 해상도 및 14비트 출력 인코더 해상도
- 통신 전송 속도: 5 Mbps
- 제어 주파수: 3 kHz
사양
| 길이 및 너비 | 44mm |
| 높이 | 40mm |
| 무게 | 194g |
| 백래시 | <10Arcmin |
| 재위치 정확도 | <12Arcmin |
| 절대 위치 정확도 | <15Arcmin | 토크 상수 | 0.039Nm/A |
| 극 쌍 수 | 14 |
| 감속비 | 30 |
| 잠금 회전 토크 | 10Nm |
| 무부하 RPM | 75RPM |
| 정격 토크 | 2Nm |
| 정격 RPM | 45RPM |
| 정격 | 6W |
| 전압 범위 | 12-48V |
| 최대 전류 | 5A |
| 정격 전류 | 1A |
| 속도 제어 정확도 | ±10% |
| 제어 정확도 | ±20% |
| 응답 시간 | ≤200us |
| 입력 인코더 해상도 | 14비트 |
| 출력 인코더 해상도 | 14비트 |
| 전송 속도 | 5Mbps |
| 제어 주파수 | 3kHz |
매뉴얼 & 문서
- 고토크 모터 디버깅 보조 사용자 매뉴얼 (PDF)
- 디버깅 매뉴얼 (PDF)
- 1.2 fdcan 프로토콜 분석 (PDF)
- 사용자 매뉴얼 (PDF)
- 설치 도면 (PDF)
- HTDW-4438-30-NE 3D 모델 (STEP)
세부사항

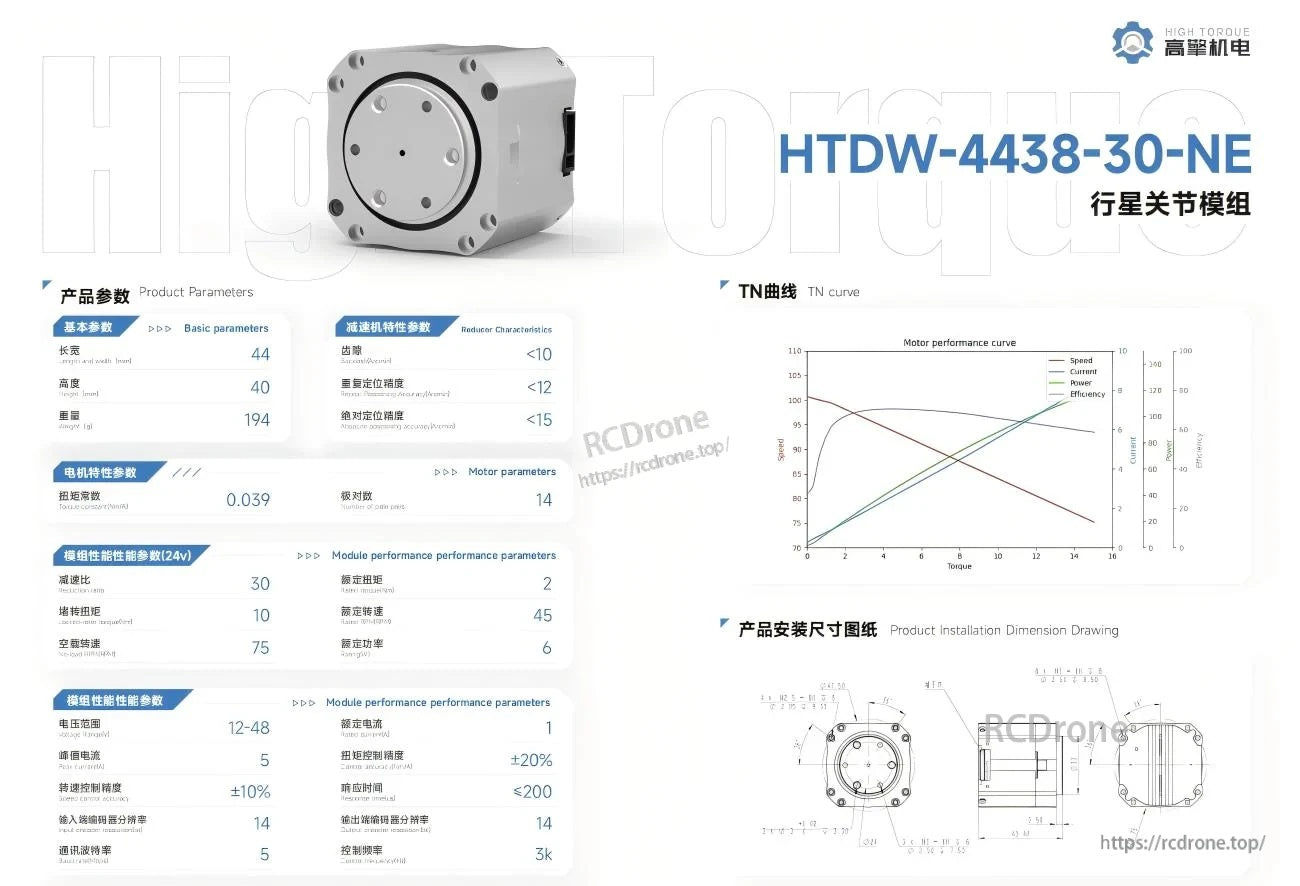
HTDW-4438-30-NE의 주요 매개변수 및 설치 치수가 신속한 통합 계획을 위해 요약되었습니다.

