

고토크 HTDW-7256-35-NE 모터, 정격 15Nm / 고정로터 60Nm, 12-48V, 14비트 인코더
고토크 HTDW-7256-35-NE 모터, 정격 15Nm / 고정로터 60Nm, 12-48V, 14비트 인코더
HIGH TORQUE
정가
$572.00 USD
정가
할인가
$572.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
고토크 HTDW-7256-35-NE 모터 (HTDW-7256 시리즈)는 정밀 저속, 고하중 모션 제어를 위해 설계된 35배 감속비의 고토크 모터 모듈입니다. 14비트 입력 및 출력 인코더 해상도, 낮은 백래시 (<10Arcmin)을 특징으로 하며, 넓은 12-48V 전압 범위를 지원합니다.
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
주요 특징
-
<감소 비율: 35
- 낮은 백래시: <10Arcmin
- 위치 정확도: 반복 <12Arcmin; 절대 <15Arcmin
- 인코더 피드백: 입력 인코더 해상도 14비트; 출력 인코더 해상도 14비트
- 제어 성능: 응답 시간 ≤200us; 제어 주파수 3kHz; 제어 정확도 ±15%; 속도 제어 정확도 ±15%
- 전기 인터페이스 매개변수: 전송 속도 5Mbps
사양
| 모델 | HTDW-7256-35-NE |
| 길이 및 너비 | 75mm |
| 높이 | 56mm |
| 무게 | 850g | Backlash | <10아크분 |
| 위치 반복 정확도 | <12아크분 |
| 절대 위치 정확도 | <15아크분 |
| 토크 상수 | 0.562Nm/A |
| 극 쌍 수 | 14 |
| 감속비 | 35 |
| 잠금 회전 토크 | 60Nm |
| 무부하 RPM | 60RPM |
| 정격 토크 | 15Nm |
| 정격 RPM | 50RPM |
| 정격 | 79W |
| 전압 범위 | 12-48V |
| 최대 전류 | 45A |
| 속도 제어 정확도 | ±15% |
| 입력 인코더 해상도 | 14비트 |
| 전송 속도 | 5Mbps |
| 정격 전류 | 8A |
| 제어 정확도 | ±15% |
| 응답 시간 | ≤200us |
| 출력 인코더 해상도 | 14비트 |
| 제어 주파수 | 3kHz |
사전 판매 및 통합 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/. 를 방문하십시오.
매뉴얼
- 설치 도면 (PDF)
- 고토크 모터 디버깅 보조 사용자 매뉴얼 (PDF)
- 디버깅 매뉴얼 (PDF)
- 1.2 fdcan 프로토콜 분석 (PDF)
- 사용자 매뉴얼 (PDF)
- HTDW-7256-35-NE 3D 모델 (STEP)
세부사항
 정밀 저속 모션 제어를 위해 설계된 컴팩트 고토크 조인트
정밀 저속 모션 제어를 위해 설계된 컴팩트 고토크 조인트 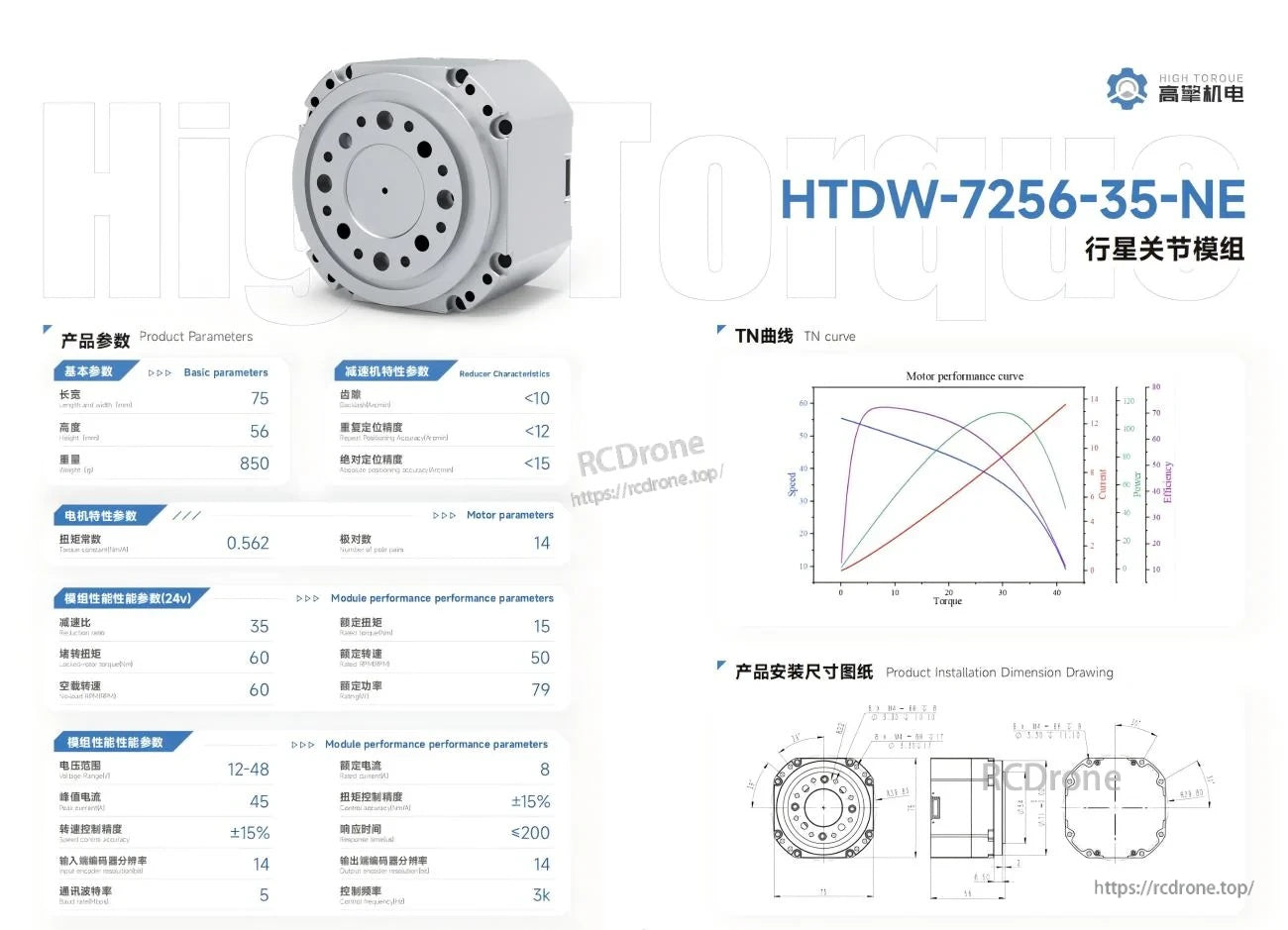 통합 및 기계적 배치를 위한 주요 성능 매개변수, 토크-속도 곡선 및 설치 치수가 제공됩니다.
통합 및 기계적 배치를 위한 주요 성능 매개변수, 토크-속도 곡선 및 설치 치수가 제공됩니다.

