Holybro Pixhawk 4 자동 조종 장치 비행 컨트롤러
Holybro Pixhawk 4 자동 조종 장치 비행 컨트롤러
HolyBro
픽업 사용 가능 여부를 로드할 수 없습니다.
Pixhawk® 4는 STMicroelectronics®의 첨단 프로세서 기술, Bosch®의 센서 기술, InvenSense® 및 NuttX 실시간 운영 체제를 탑재하여 모든 자율 주행차를 제어하는 데 놀라운 성능, 유연성 및 안정성을 제공합니다.
Pixhawk 4의 마이크로컨트롤러는 2MB 플래시 메모리와 512KB RAM을 가지고 있습니다. 증가된 전력과 RAM 리소스로 개발자는 개발 작업에서 더 생산적이고 효율적일 수 있습니다. 더 복잡한 알고리즘과 모델을 자동 조종 장치에 구현할 수 있습니다.
고성능, 저잡음 IMU는 안정화 애플리케이션을 위해 설계되었습니다. 모든 센서의 데이터 준비 신호는 자동 조종 장치의 별도의 인터럽트 및 타이머 캡처 핀으로 라우팅되어 센서 데이터의 정확한 타임스탬핑이 가능합니다. 새롭게 설계된 진동 분리는 더 정확한 판독을 가능하게 하여 차량이 전반적인 비행 성능을 개선할 수 있습니다.
두 개의 외부 SPI 버스와 여섯 개의 관련 칩 선택 라인을 통해 추가 센서와 SPI 인터페이스 페이로드를 추가할 수 있습니다. 총 4개의 I2C 버스가 있으며, 두 개는 외부 사용 전용이고 두 개는 GPS/나침반 모듈용 직렬 포트와 함께 그룹화됩니다.
메모:
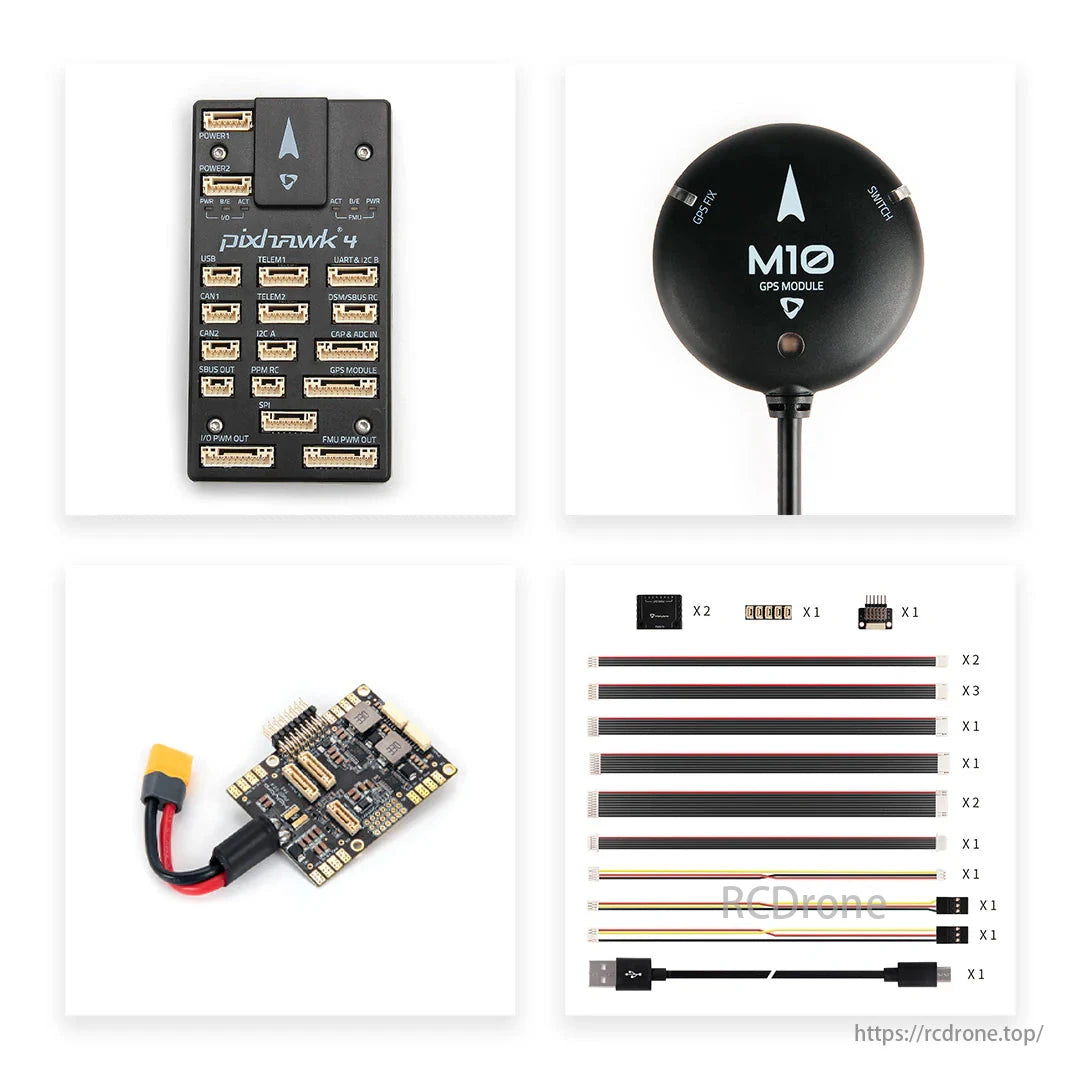
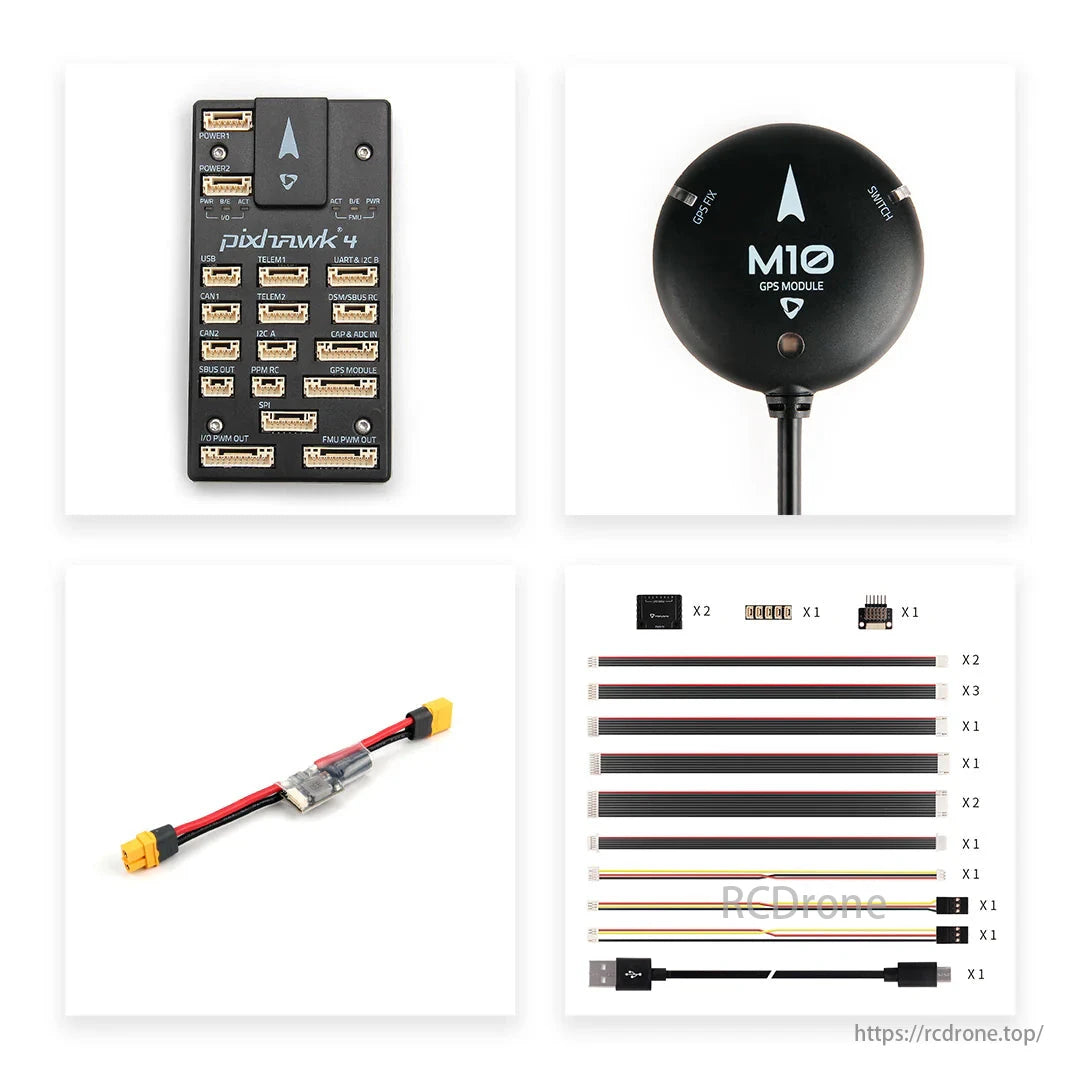
- M10 GPS 필요 PX4 1.14 및 ArduPilot 4.3 이상.
- 파워모듈 비교표
기술 사양
- 메인 FMU 프로세서
- STM32F765 - 32비트 Arm ® Cortex® -M7, 216MHz, 2MB 메모리, 512KB RAM
- STM32F765 - 32비트 Arm ® Cortex® -M7, 216MHz, 2MB 메모리, 512KB RAM
- IO 프로세서
- STM32F103 - 32비트 Arm® Cortex®-M3, 72MHz, 64KB SRAM(현재)
- STM32F100 - 32비트 Arm ® Cortex® -M3, 24MHz, 8KB SRAM(단종)
- 온보드 센서
- 가속/자이로: ICM-20689
- 가속/자이로: BMI055/ICM-20602
- 잡지: IST8310
- 기압계: MS5611
- 가속/자이로: ICM-20689
전기 데이터
- 전원 모듈 출력 : 4.9~5.5V
- 최대 입력 전압: 6V
- 최대 전류 감지: 120A
- USB 전원 입력: 4.75~5.25V
- 서보 레일 입력: 0~36V
- 작동 온도: -25-85°C
기계 데이터
- 크기: 44x84x12mm
- 무게(플라스틱 케이스): 33.3g
- 무게(알루미늄 케이스): 49g
다운로드:
상품번호 11032/11035 포함 사항:
- Pixhawk 4 비행 컨트롤러(플라스틱 또는 알루미늄)
- 케이블 세트
SKU 20045/20046/20114/20115 포함 사항:
- Pixhawk 4 비행 컨트롤러(플라스틱 또는 알류미늄)
- 전원 모듈: PM02 V3 12S/PM07 14S
- 케이블 세트
SKU 20139/20140/20141/20142/20269/20270/20271/20272 포함 사항:
- Pixhawk 4 비행 컨트롤러
- 전원 모듈: PM02 V3 12S/PM07 14S
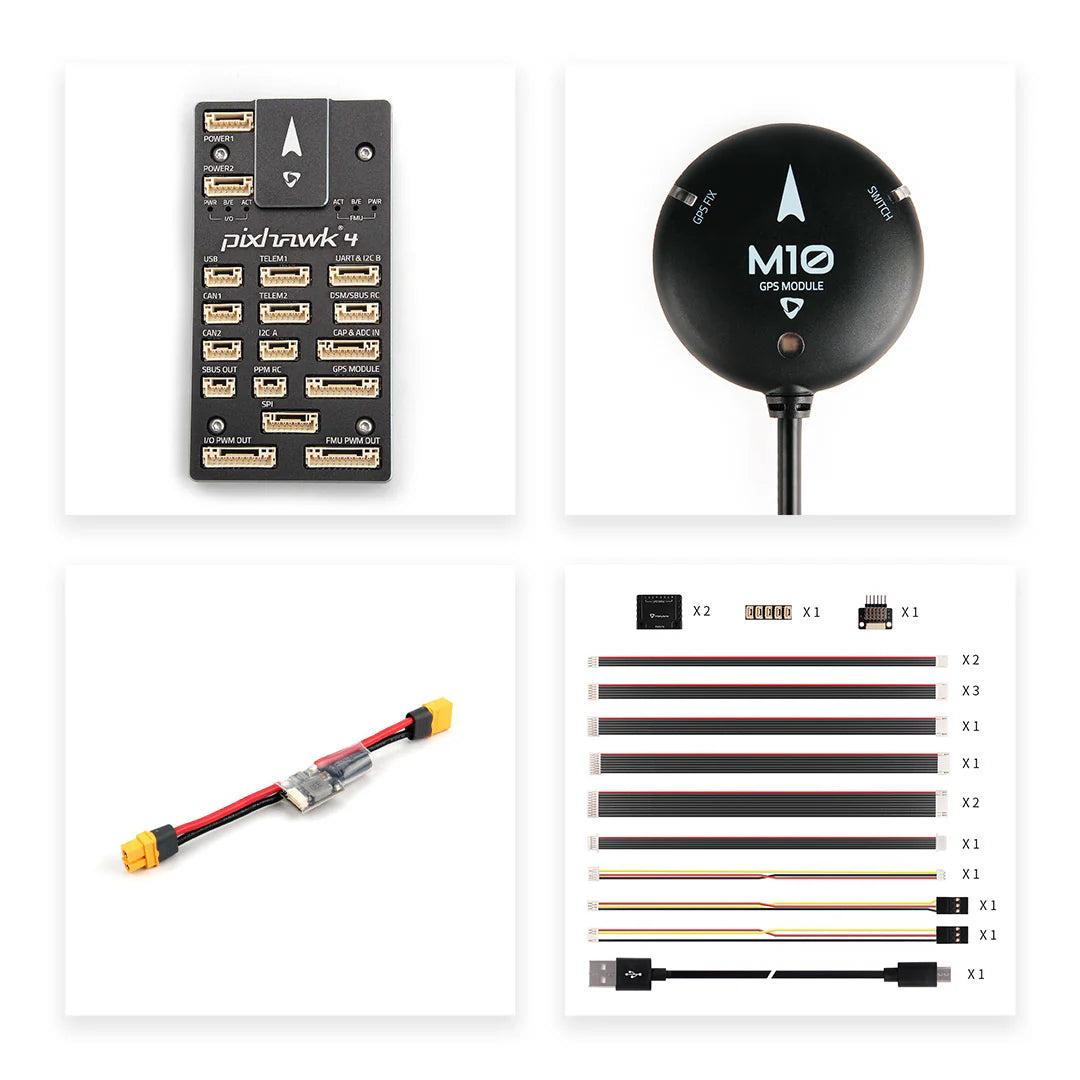
- GPS: M9N/엠10
- 케이블 세트

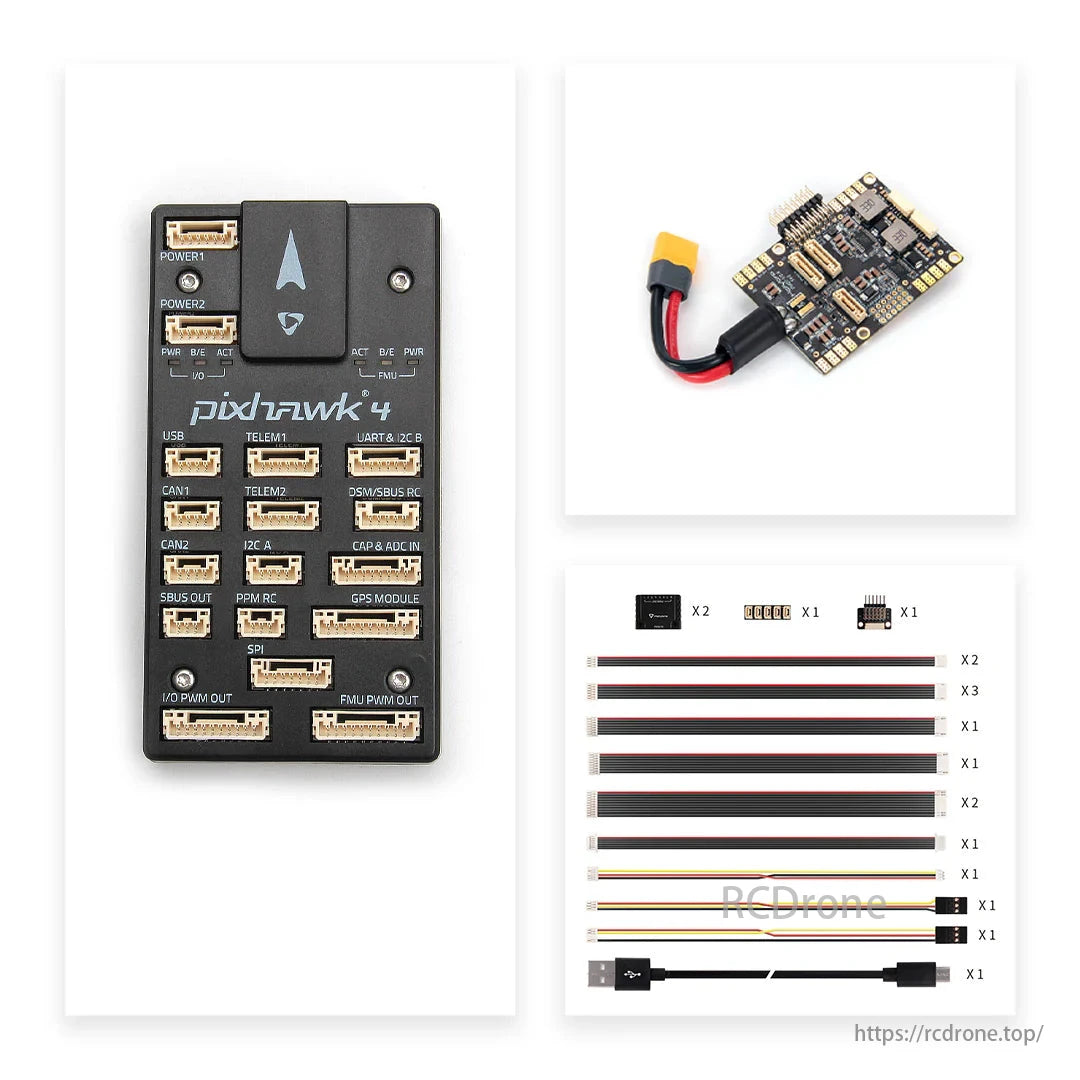
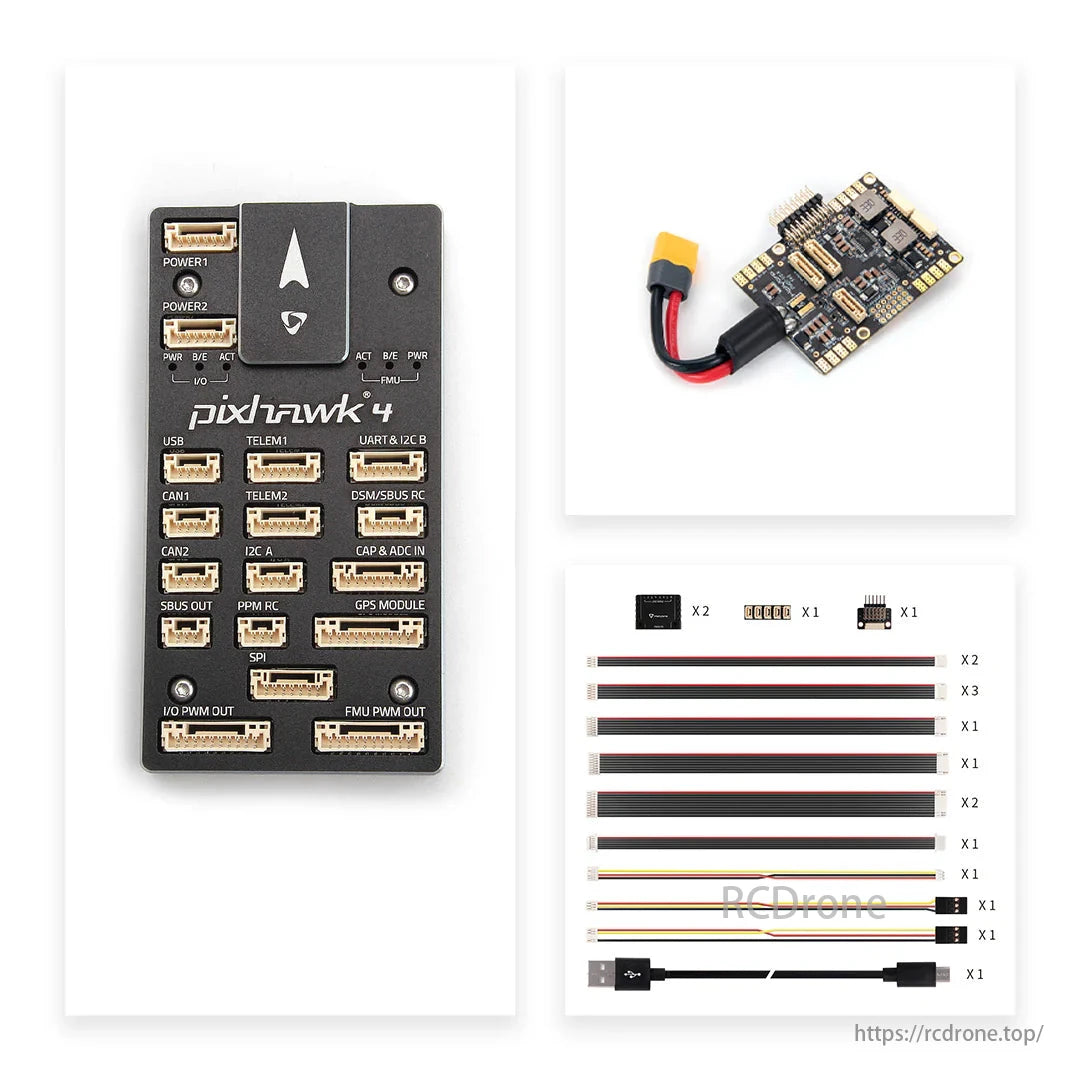
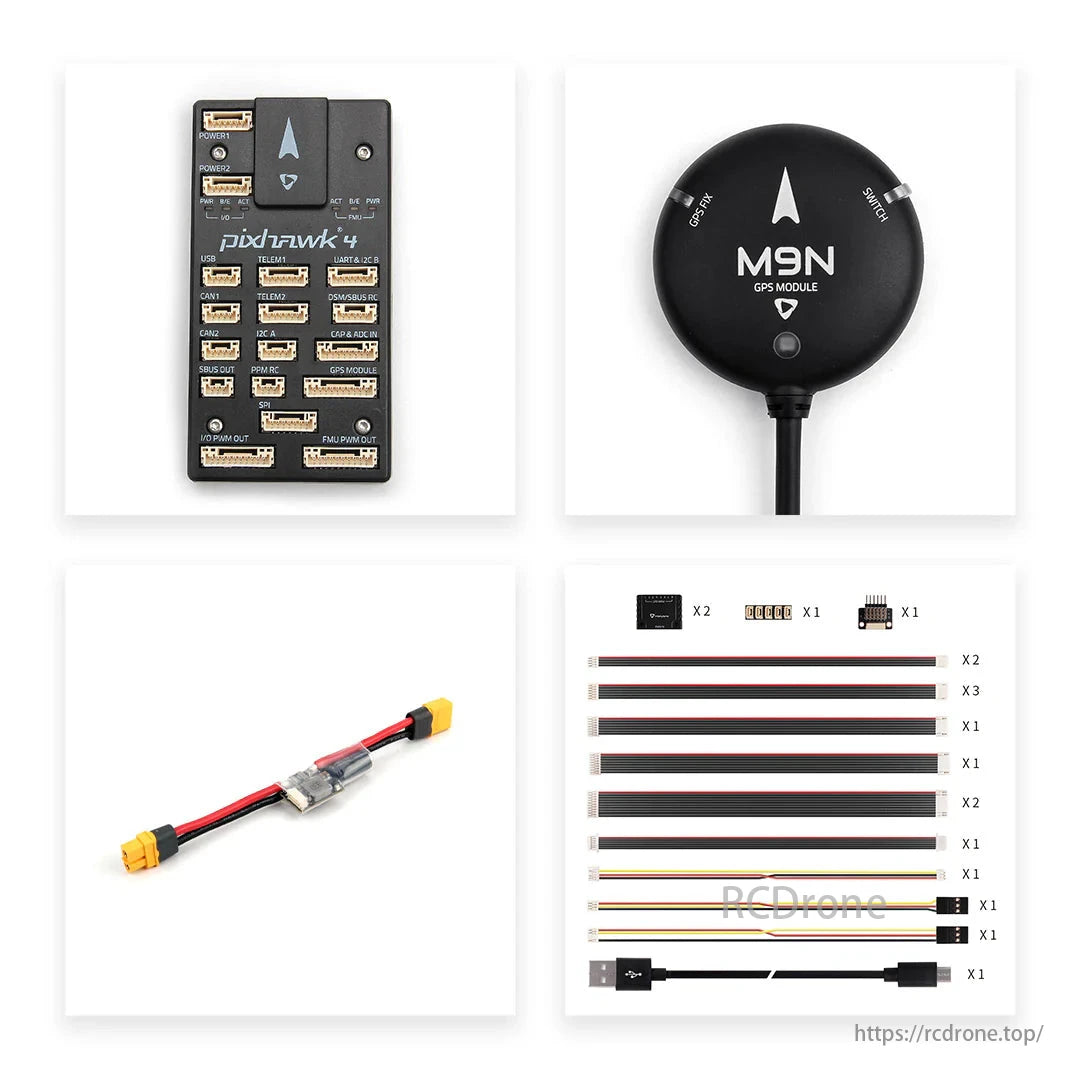
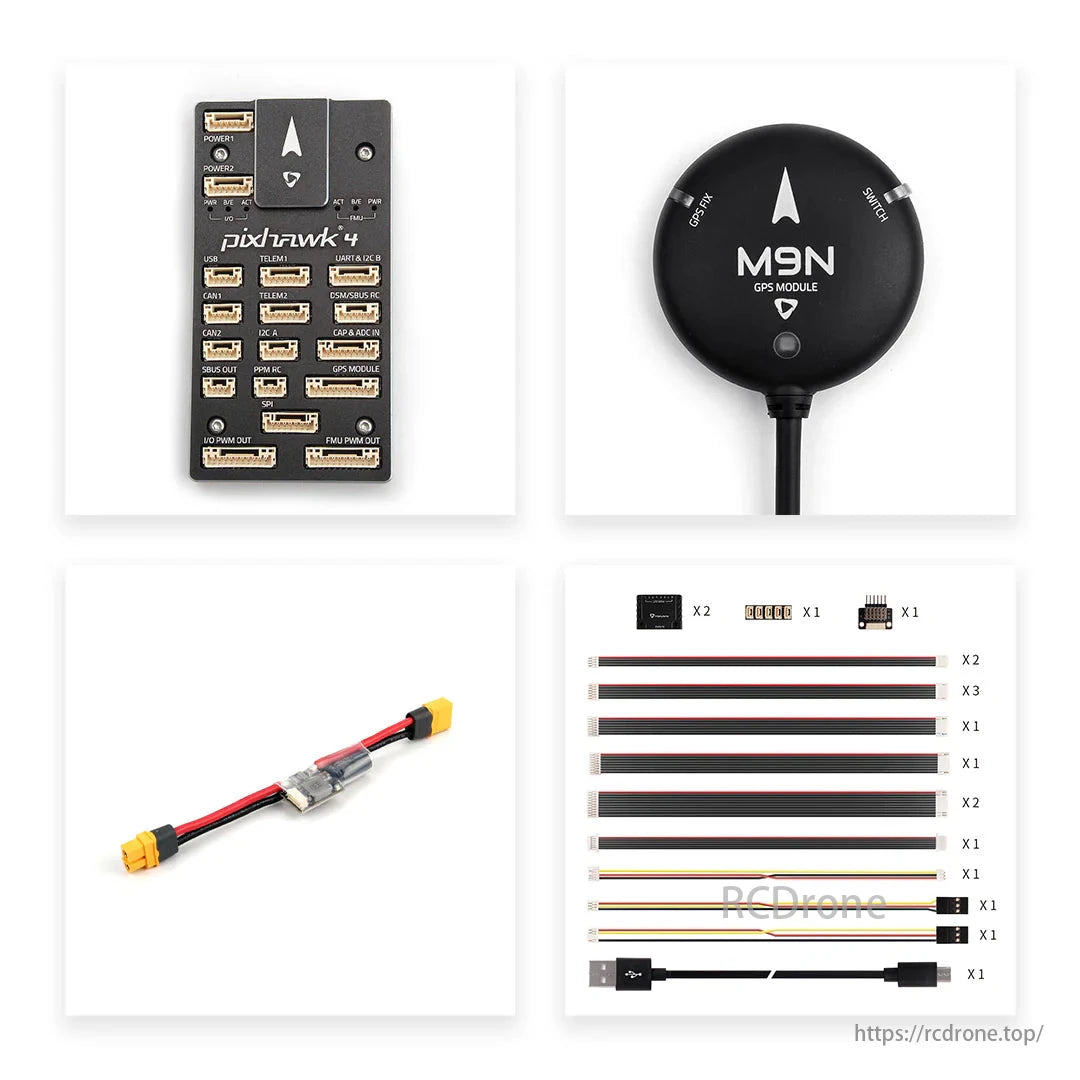
USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI, GPS 모듈 등 다양한 포트를 갖춘 Pixhawk 4 비행 컨트롤러입니다.

PX4 자동 조종 시스템으로 구동되는 Pixhawk 비행 컨트롤러.

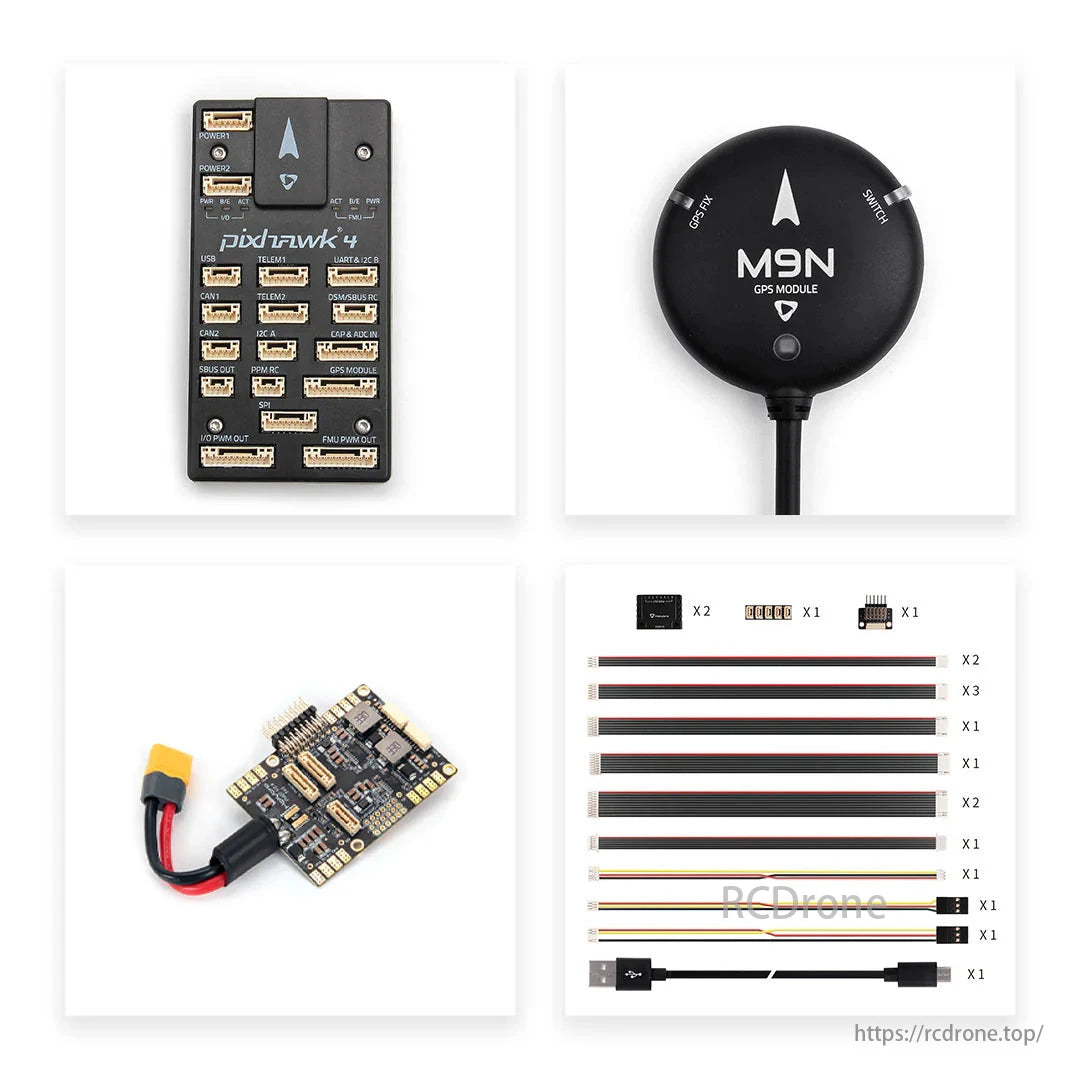
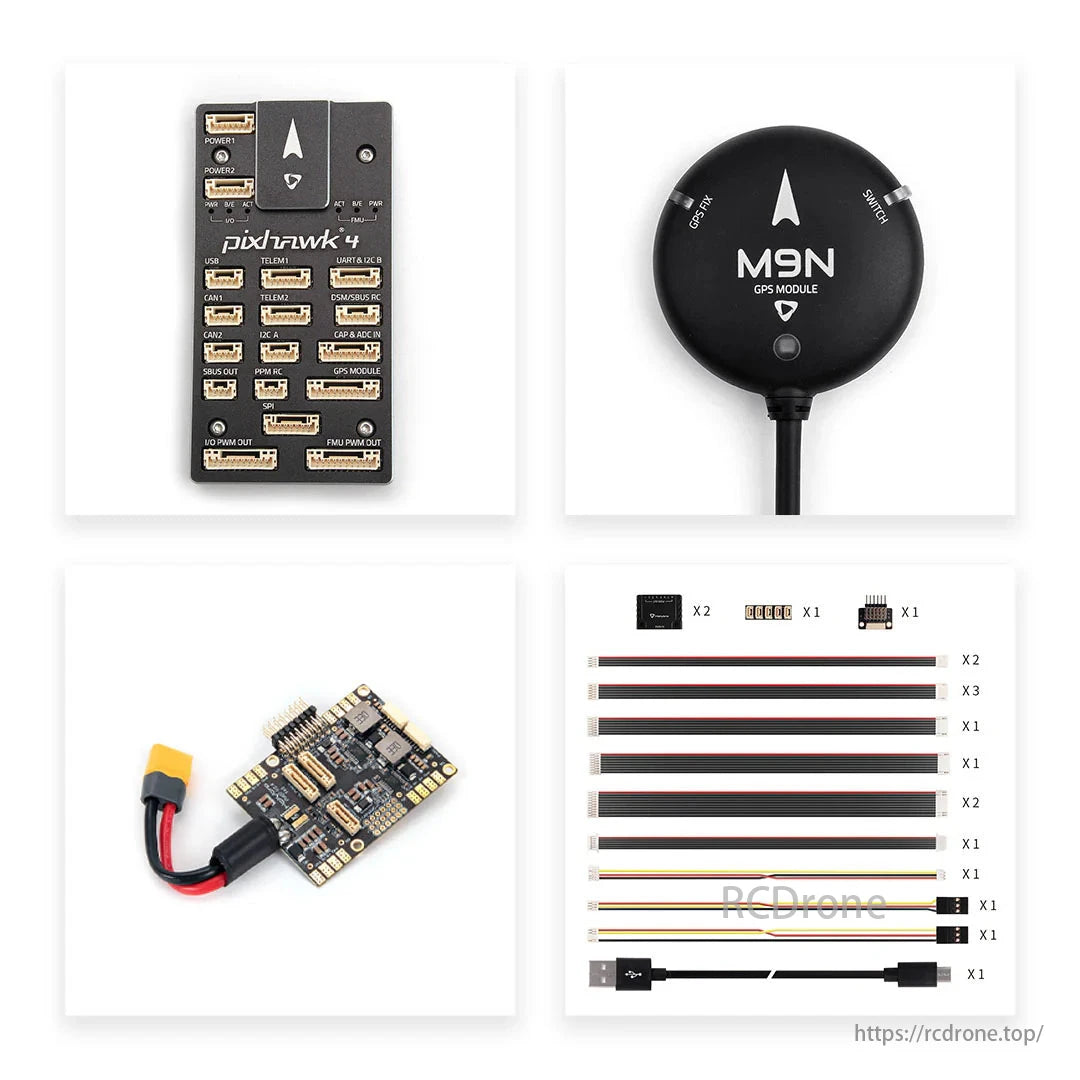
Pixhawk 4 비행 컨트롤러, M9N GPS 모듈, XT60 커넥터가 있는 전원 모듈, RC 드론 조립에 필요한 다양한 케이블.

USB, CAN, GPS 모듈을 포함한 다양한 포트가 있는 Pixhawk 4 비행 컨트롤러. 전원 모듈과 연결을 위한 여러 케이블이 포함되어 있습니다.

Pixhawk 4 비행 컨트롤러, M9N GPS 모듈, XT60 커넥터가 있는 전원 모듈 및 다양한 연결 케이블.
Related Collections