Holybro Pixhawk 6X Pro 자동 조종 장치 비행 컨트롤러
Holybro Pixhawk 6X Pro 자동 조종 장치 비행 컨트롤러
HolyBro
픽업 사용 가능 여부를 로드할 수 없습니다.
주요 디자인 포인트
- 높은 가속도계 동적 범위(±40)를 갖춘 고성능 ADIS16470 산업용 IMU g), 완벽하다 까다로운 UAV 애플리케이션에서의 정확한 모션 감지
- 산업 및 상업용 드론 애플리케이션에 이상적인 더 높은 스펙트럼의 공진 주파수를 갖춘 완전히 새로운 고급 내구성 진동 절연 소재
- 별도의 버스에 있는 3중 중복 IMU 및 2중 중복 기압계
- 고성능 STM32H753 프로세서
- 모듈형 비행 컨트롤러: IMU, FMU 및 Base 시스템 분리
- 안전 중심 설계에는 다양한 제조업체와 모델 라인업의 센서가 통합되어 있습니다.
- 독립적인 LDO는 독립적인 전원 제어로 모든 센서에 전원을 공급합니다.
- 고속 미션 컴퓨터 통합을 위한 이더넷 인터페이스. 대상 장치에 50Ω 종단 저항을 사용하면 변압기 없는 환경을 구현할 수 있습니다. (AN2190 50Ω 종단).
- 온도 제어 IMU 보드는 IMU의 최적 작동 온도를 허용합니다.
- 하드웨어 전환 가능 3.3V 또는 5V 신호 모드(베이스 보드 수정 필요)
메모:
- 이 제품을 작동하려면 FC 모듈 + 베이스보드가 필요합니다. FC 모듈이나 베이스보드 자체는 작동하지 않습니다.
사양
프로세서 및 센서
- FMU 프로세서: STM32H753
- 32비트 Arm® Cortex®-M7, 480MHz, 2MB 플래시 메모리, 1MB RAM
- IO 프로세서: STM32F103
- 32비트 Arm® Cortex®-M3, 72MHz, 64KB SRAM
- 온보드 센서
- 가속/자이로: ADIS16470
- ±40g, 진동 분리형 산업용 IMU
- 가속/자이로: IIM-42652
- ±16g, 진동 분리형 산업용 IMU
- Accel/Gyro: BalancedGyro™ 기술을 탑재한 ICM-45686
- ±32g, 하드 장착
- 기압계: ICP20100
- 기압계: BMP388
- 잡지: BMM150
- 가속/자이로: ADIS16470
- (주)엔엑스피 EdgeLock SE050 플러그 앤 트러스트 하드웨어 보안 요소
전기 데이터
- 전압 정격:
- 최대 입력 전압: 6V
- USB 전원 입력: 4.75~5.25V
- 서보 레일 입력: 0~36V
- 현재 등급:
- Telem1 출력 전류 리미터: 1.5A
- 다른 모든 포트 결합 출력 전류 리미터: 1.5A
- 작동 온도: -25-85°C
기계 데이터
- 치수
- 비행 컨트롤러 모듈: 38.8 x 31.8 x 30.1mm
- 표준 베이스보드: 52.4 x 102 x 16.7mm (알류미늄)
- 미니 베이스보드: 43.4 x 72.8 x 14.2 mm
- 무게
- 비행 컨트롤러 모듈: 50g
- 표준 베이스보드: 72.5g (알류미늄)
- 미니 베이스보드: 26.5g
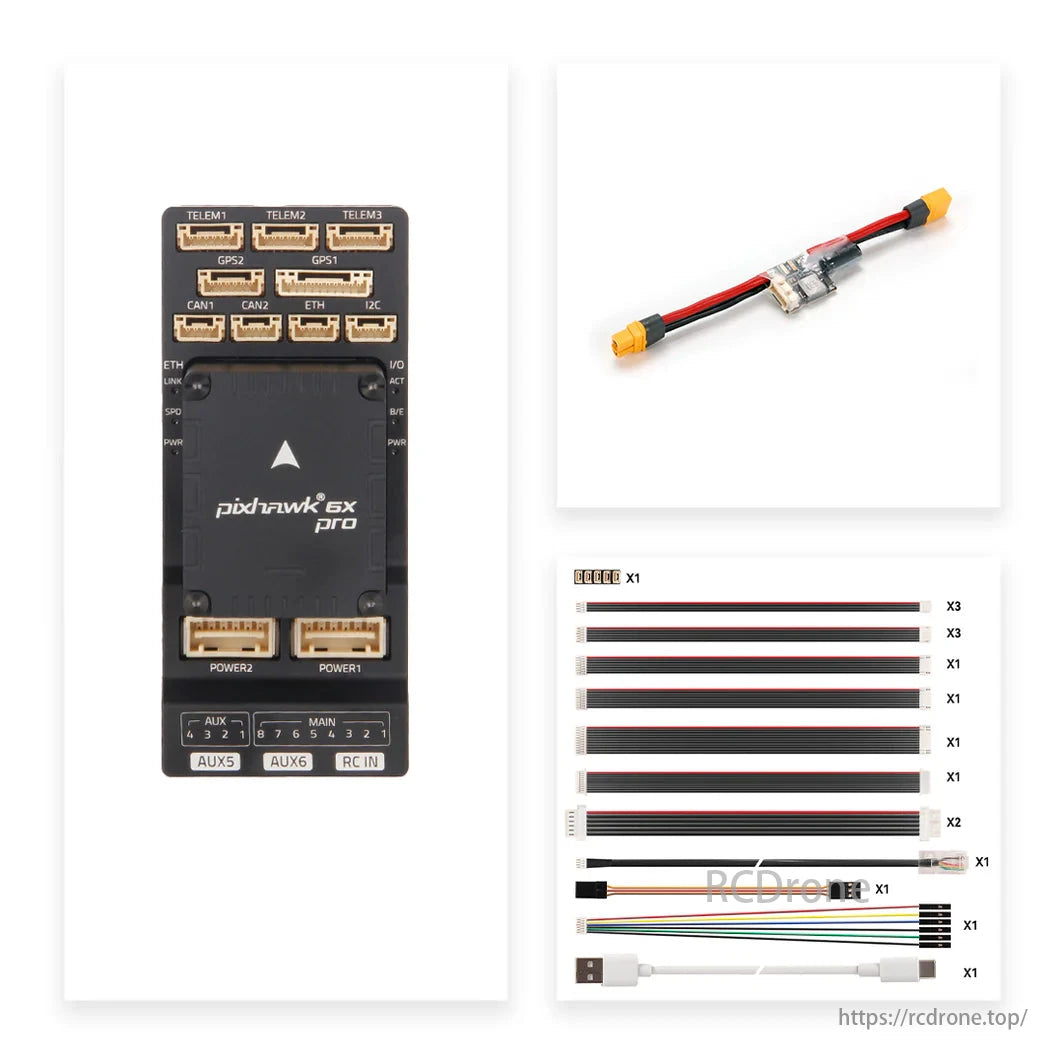
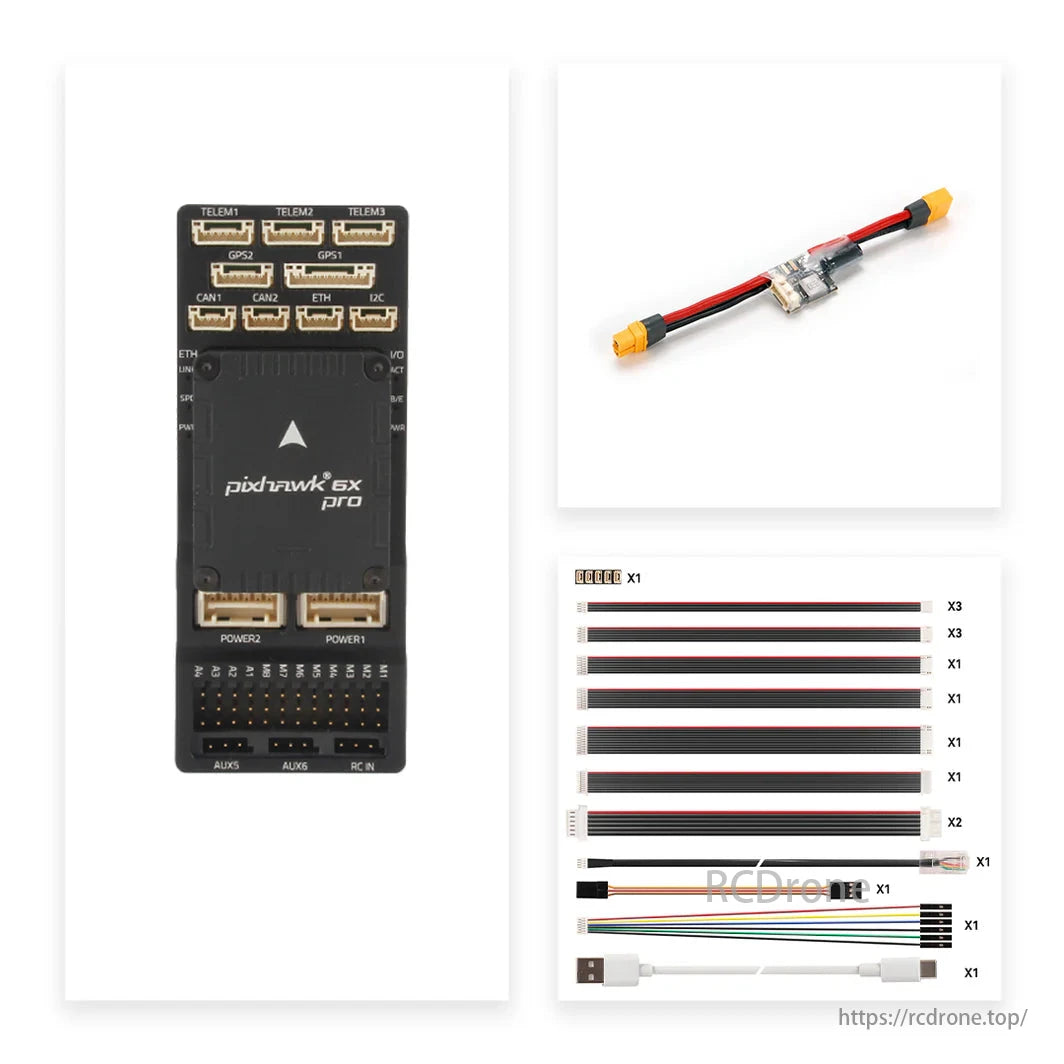
패키지 포함 사항
FC 모듈에는 다음이 포함됩니다:
- 픽스호크 6X Pro 비행 컨트롤러 모듈
- 옵션 IMU 댐핑 교체(사전 설치된 것보다 더 부드럽습니다)
표준 V2A/V2B/미니 세트에는 다음이 포함됩니다.
- Pixhawk 6X Pro 비행 컨트롤러 모듈
- Pixhawk Standard Baseboard v2A/ Pixhawk Standard Baseboard v2B/ 미니 베이스보드
- PM02D HV 전원 모듈
- 케이블 세트
세부
완전히 새로운 진동 분리 설계
이 새로운 진동 차단 설계는 ac를 사용합니다.기존 폼 디자인 대신 사용자 정의로 제작된 내구성 있는 실리콘 기반 절연 소재. 비광범위한 R&D 및 테스트를 거쳐 산업 및 상업용 드론에 적합한 더 높은 스펙트럼의 공진 주파수를 통해 최적의 IMU 감쇠 특성을 제공합니다.
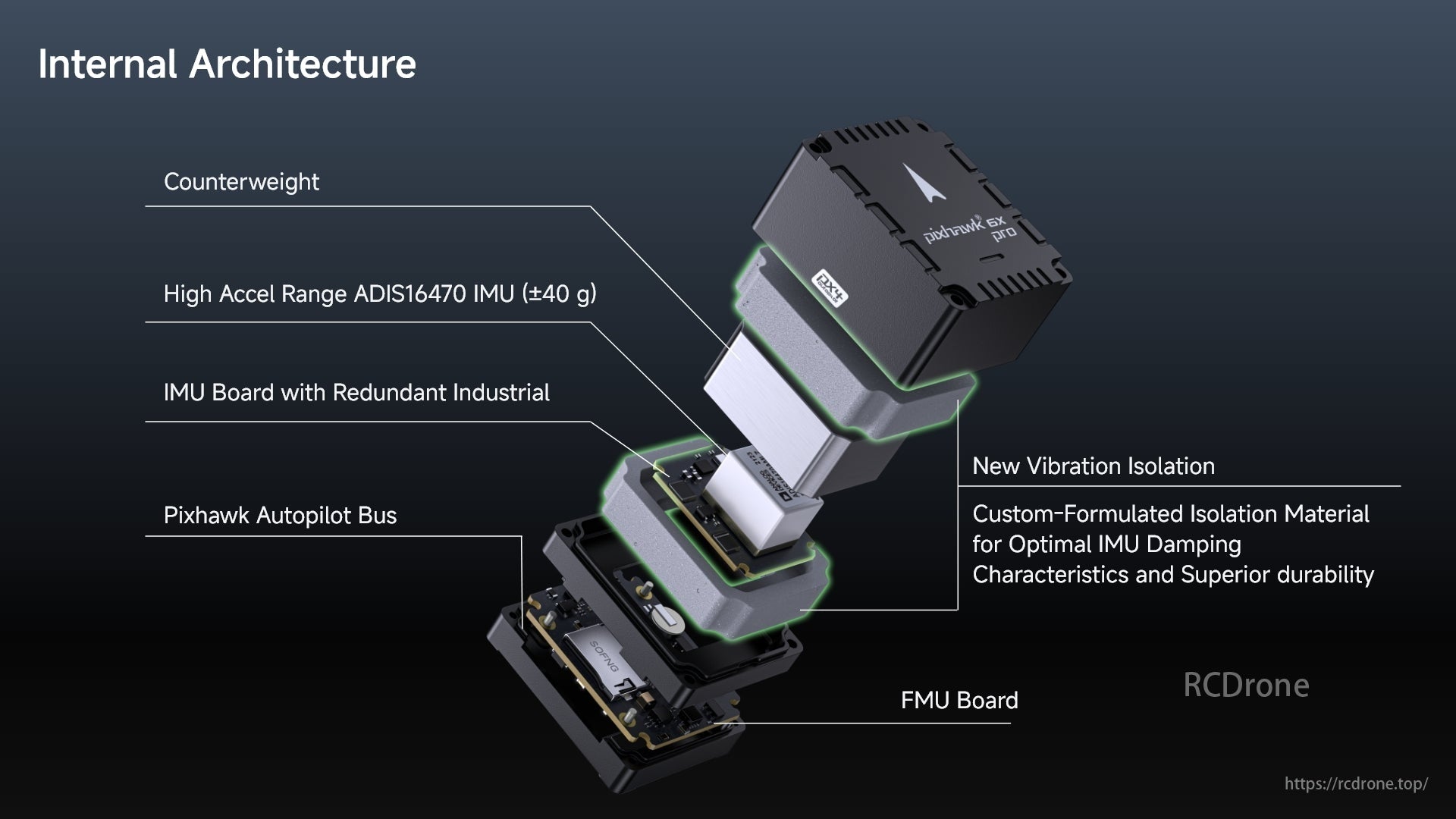
내부 아키텍처: 상대추, 고가속 범위 ADIS16470 IMU(±40g), 중복 산업용 IMU 보드, Pixhawk 자동 조종 버스, 새로운 진동 분리, FMU 보드.
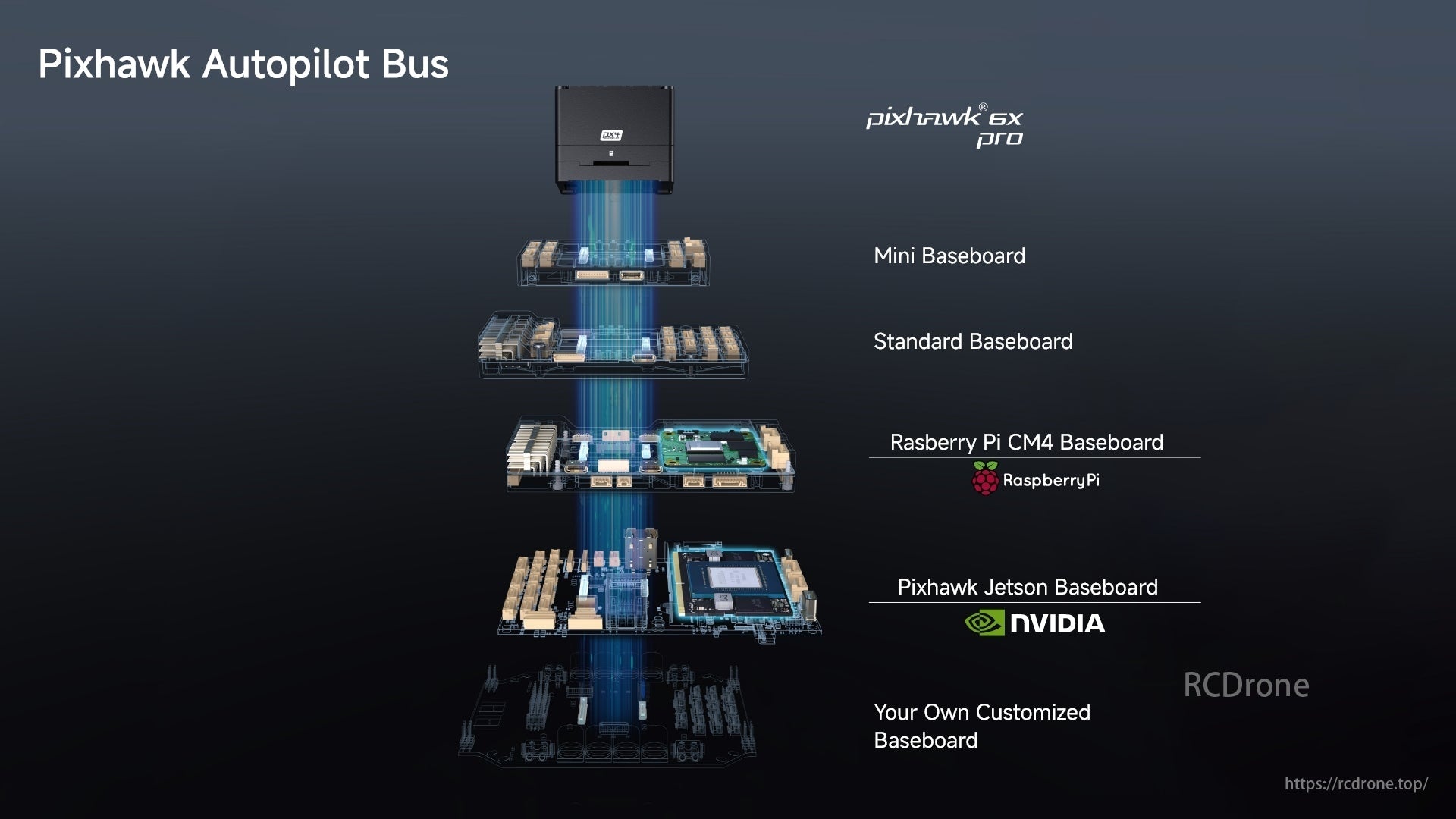
Pixhawk Autopilot Bus는 Mini, Standard, Raspberry Pi CM4, Jetson Baseboards 및 맞춤형 베이스보드를 연결합니다.
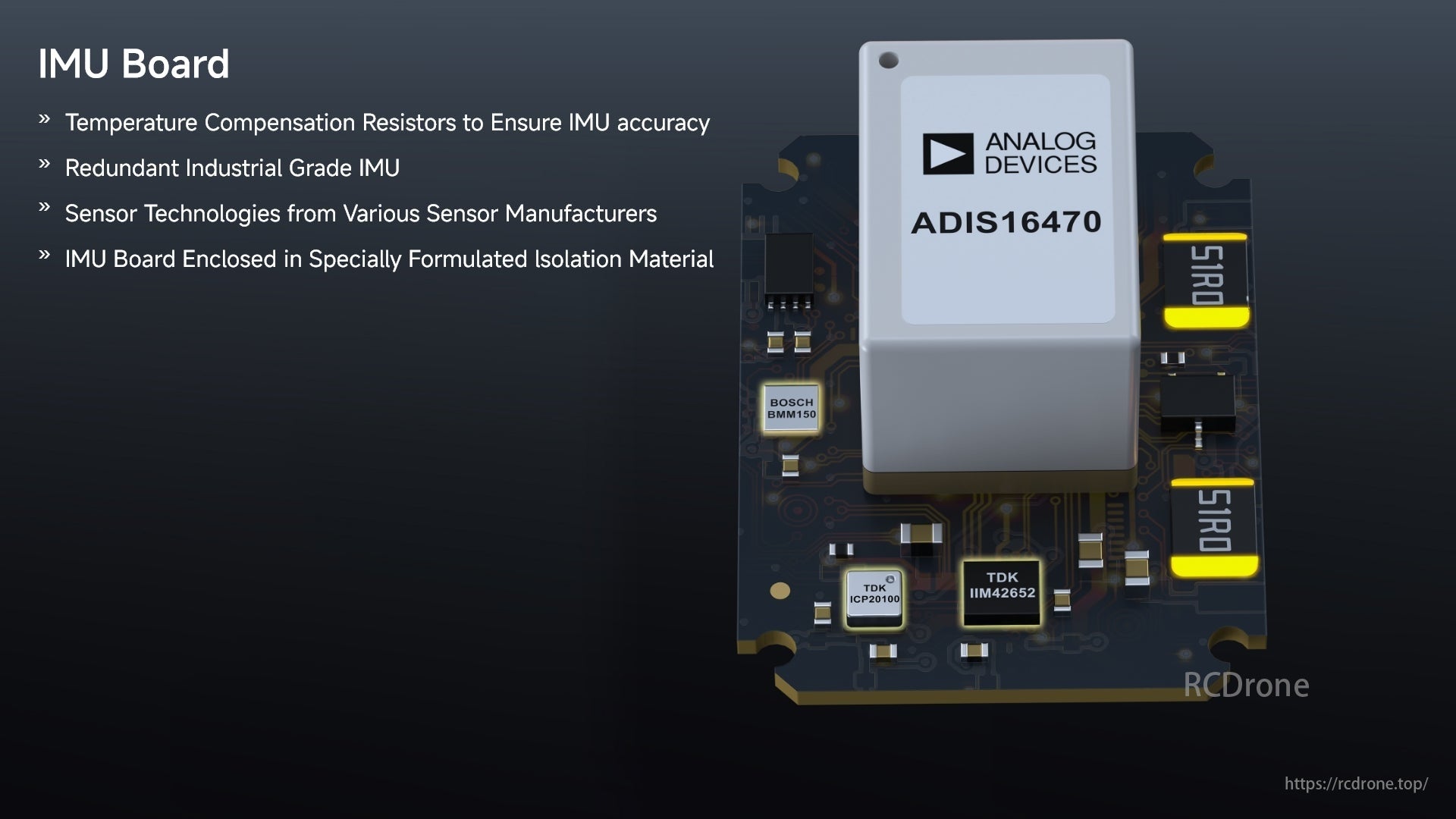
IMU 보드는 온도 보상 저항기, 중복 산업용 IMU, 다양한 제조업체의 센서를 탑재하고 있으며 절연 소재로 둘러싸여 있습니다.
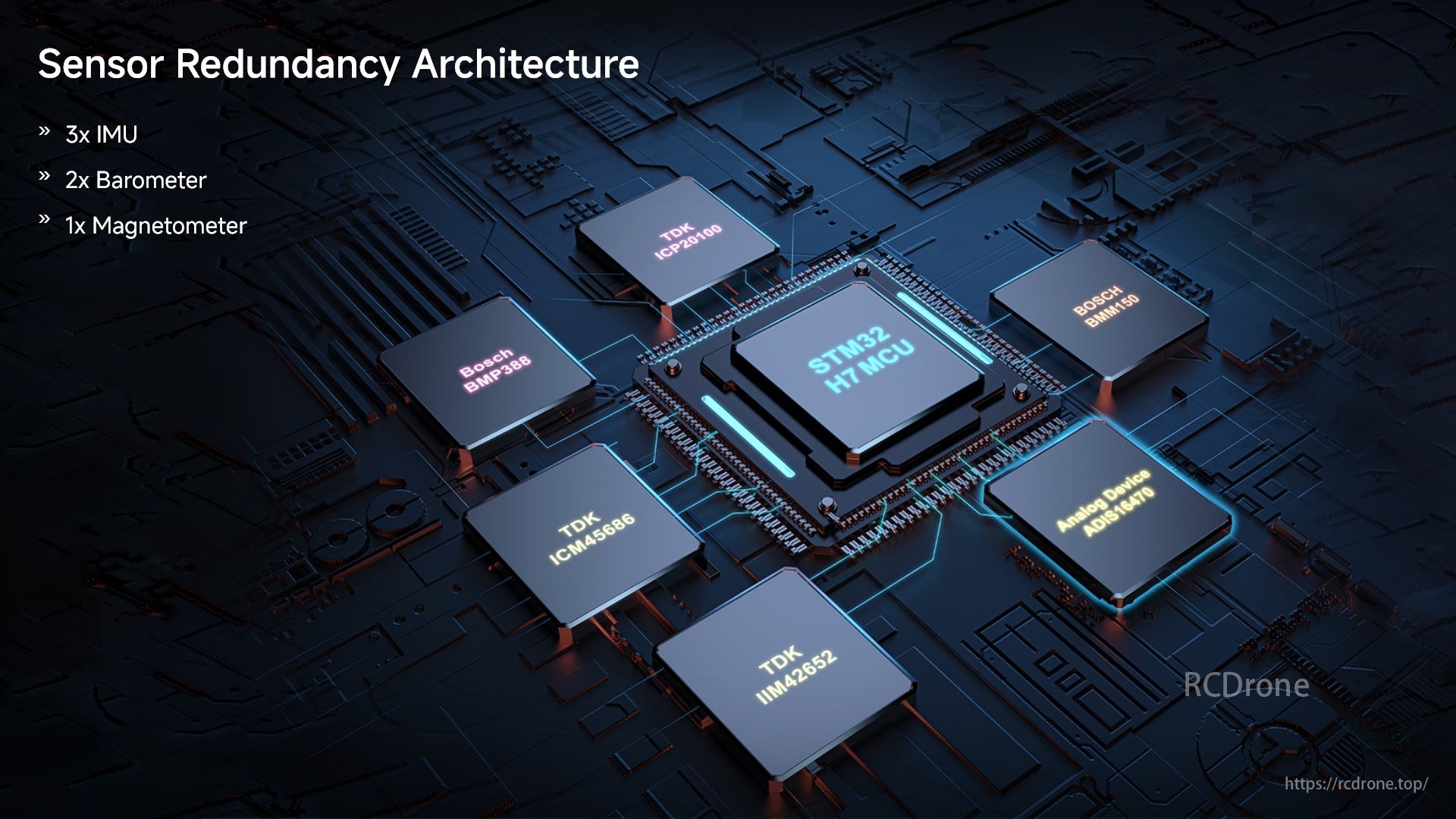
센서 중복 아키텍처에는 3개의 IMU, 2개의 기압계, 1개의 자력계가 포함되며 STM32 H7 MCU, TDK IC, Bosch BMP388, Analog Devices ADIS16470과 같은 구성 요소가 포함됩니다.
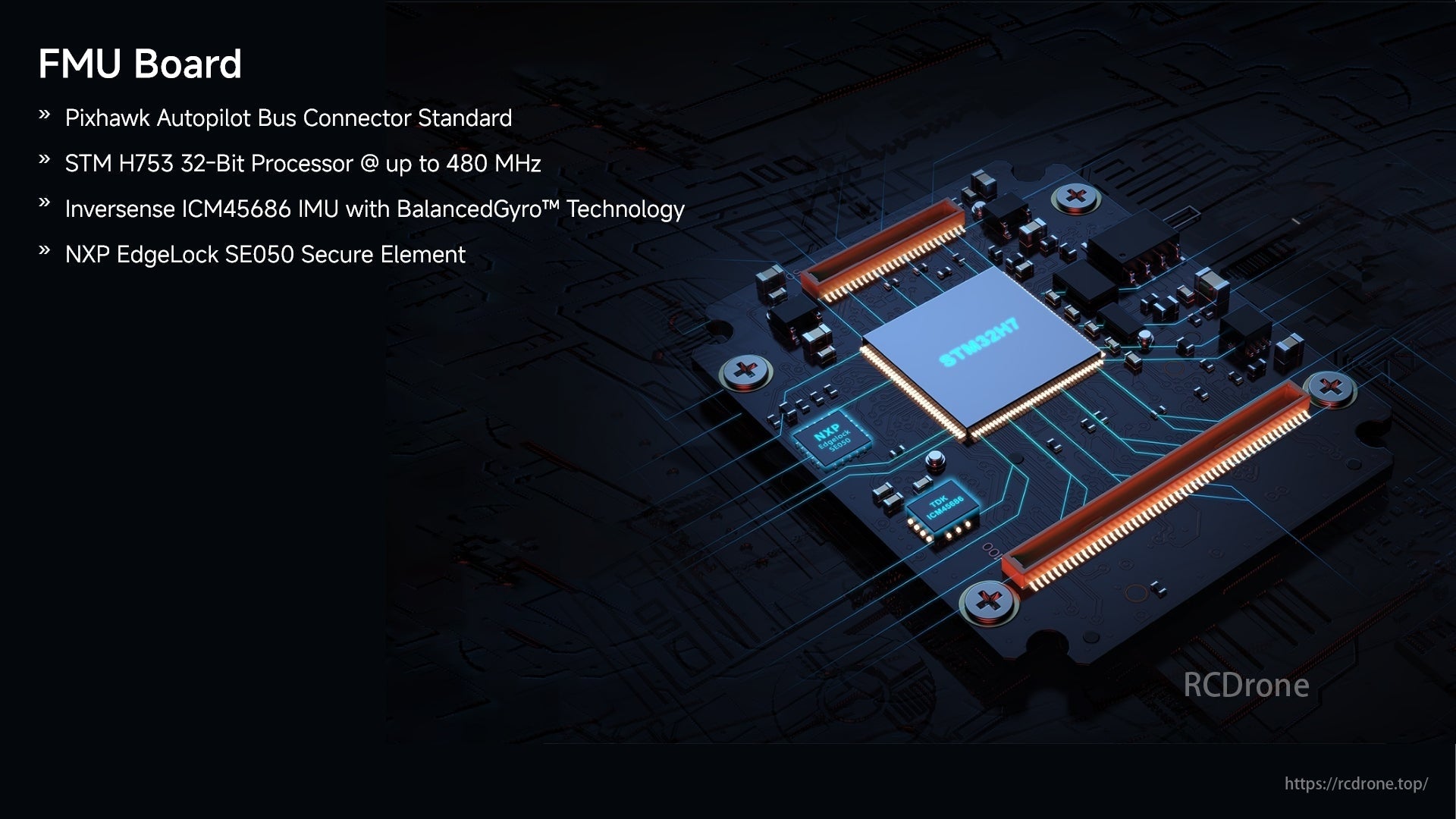
FMU 보드는 Pixhawk 자동 조종 버스 커넥터 표준, 최대 480MHz의 STM H753 32비트 프로세서, BalancedGyro 기술을 탑재한 Inversense ICM45686 IMU, NXP EdgeLock SE050 보안 요소를 갖추고 있습니다.
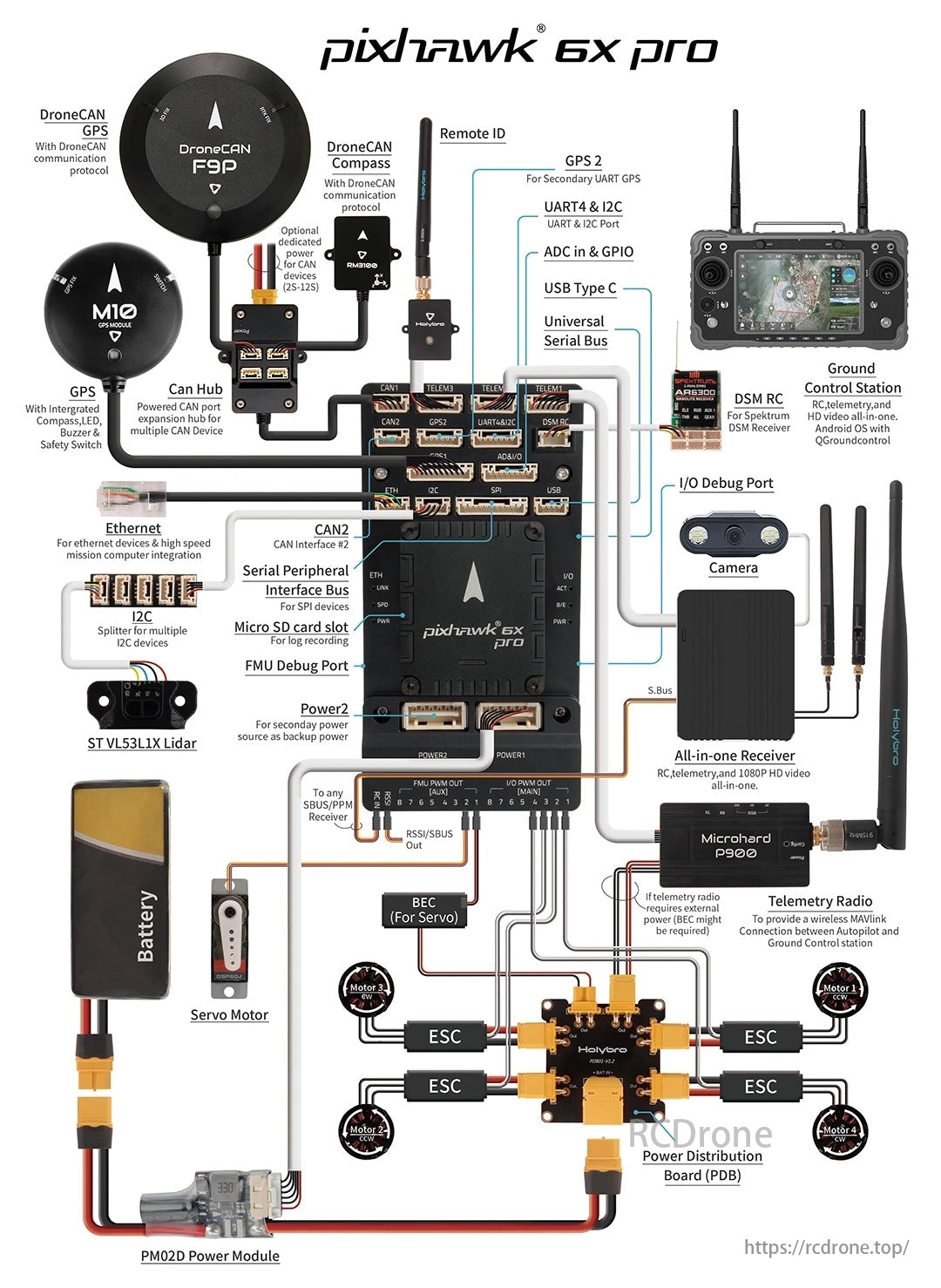
Pixhawk 6X Pro 다이어그램은 GPS 모듈, 나침반, 지상 제어 스테이션, 카메라, 원격 측정 라디오, ESC, 모터, 전원 분배 보드를 포함한 드론의 자동 조종 시스템에 대한 연결을 보여줍니다. CAN, I2C, UART, USB와 같은 다양한 인터페이스가 구성 요소 간 통신에 사용됩니다.
Related Collections