Holybro Pixhawk 6X-RT - (개발자 에디션) 자동 조종 장치 비행 컨트롤러 표준/미니 세트
Holybro Pixhawk 6X-RT - (개발자 에디션) 자동 조종 장치 비행 컨트롤러 표준/미니 세트
HolyBro
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
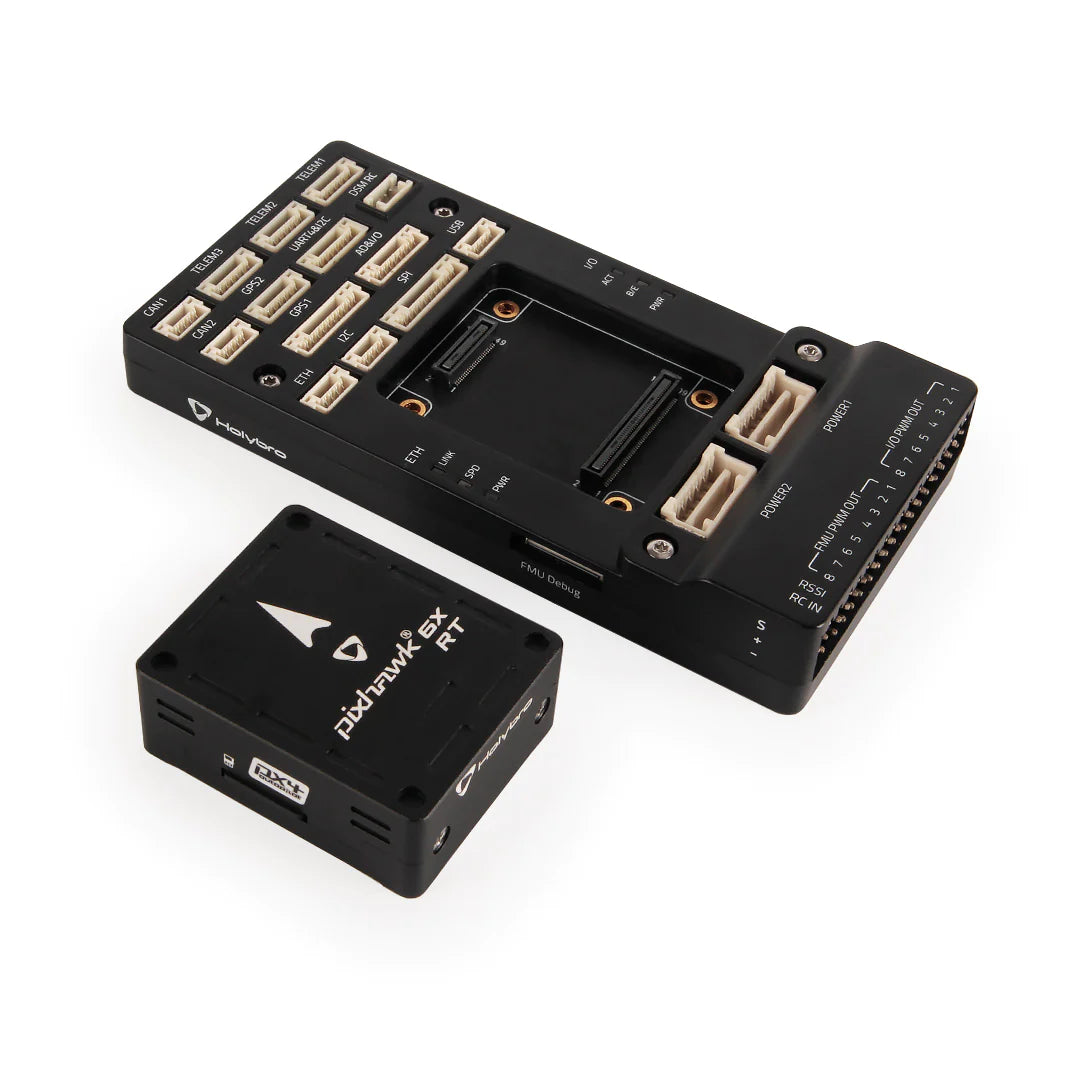
Pixhawk 6X-RT는 Pixhawk® FMUv6X-RT 개방형 표준 및 Pixhawk® 자동 조종 장치 버스 표준을 기반으로 합니다. PX4 Autopilot®이 사전 설치되어 제공됩니다. Pixhawk 6X-RT 비행 컨트롤러 내부에는 NXP 기반 i.Bosch® 및 InvenSense®의 센서 기술과 결합된 MXRT1176 MCU는 모든 자율 차량 제어를 위한 유연성과 신뢰성을 제공합니다.
i.MXRT1176 마이크로컨트롤러에는 1GHz의 Arm® Cortex-M7과 400MHz의 Cortex-M4가 포함되어 있습니다. 2MB SRAM과 64MB Octal SPI 플래시가 있습니다. 업데이트된 처리 능력 덕분에 개발자는 복잡한 알고리즘과 모델을 허용하여 개발 작업의 생산성과 효율성을 높일 수 있습니다.
더 나은 안정화를 위해 설계된 고성능, 저잡음 IMU가 포함되어 있으며 별도의 버스에 3중 중복 IMU 및 2중 중복 기압계가 있습니다. 오토파일럿이 센서 오류를 감지하면 시스템은 다른 시스템으로 원활하게 전환하여 비행 제어 신뢰성을 유지합니다. 독립적인 LDO는 독립적인 전력 제어를 통해 모든 센서 세트에 전력을 공급합니다. 고주파 진동을 걸러내고 소음을 줄여 정확한 판독값을 보장하는 진동 차단 시스템을 통해 차량의 전반적인 비행 성능이 향상됩니다. 이제 통합된 Microchip 이더넷 PHY, 이더넷을 통한 임무 컴퓨터와의 고속 통신이 가능합니다.
Pixhawk 6X-RT는 기업 연구소, 스타트업, 학계(연구, 교수, 학생) 및 상용 애플리케이션의 개발자에게 적합합니다. 이 Flight 컨트롤러는 Pixhawk 베이스보드, Pixhawk Mini 베이스보드, Pixhawk RPi CM4 베이스보드 등 Pixhawk Autopilot 버스를 사용하는 모든 베이스보드와 호환됩니다.
주요 설계 포인트
- 고성능 듀얼 코어 i.Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz를 갖춘 MXRT1176 프로세서
- 모듈식 비행 컨트롤러: 100핀 및 50핀 Pixhawk® 자동 조종 장치 버스 커넥터로 연결된 분리된 IMU, FMU 및 베이스 시스템.
- 이중화: 별도의 버스에 IMU 센서 3개 및 기압계 센서 2개
- 3중 중복 도메인: 별도의 버스와 별도의 전원 제어 기능을 갖춘 완전히 격리된 센서 도메인
- 고주파 진동을 필터링하고 소음을 줄여 정확한 판독을 보장하는 진동 차단 시스템
- 고속 임무 컴퓨터 통합을 위한 이더넷 인터페이스
- IMU는 온보드 가열 저항기에 의해 온도 제어되므로 IMU의 최적 작동 온도가 가능합니다.
- 하드웨어 보안 요소 NXP EdgeLock SE051 널리 신뢰받는 EdgeLock SE050 플러그 앤 트러스트 보안 요소 제품군의 확장으로 현장에서 애플릿 업데이트를 지원하고 AVA_VAN을 통해 CC EAL 6+ 인증을 받은 입증된 보안입니다.5 최대 OS 수준으로 최신 공격 시나리오에 대한 강력한 보호를 제공합니다. 이자형g 운영자 ID를 안전하게 저장하기 위한
참고:
- 비행 테스트 시간이 계속해서 축적되는 동안 얼리 어답터를 위한 개발자 에디션
- 이 비행 컨트롤러는 현재 PX4 비행 스택에서만 지원됩니다. (펌웨어 대상: FMUv6xrt). Ardupilot에서는 지원되지 않습니다.
- 이 비행 컨트롤러는 디지털 전원 모듈을 사용합니다(Pixhawk 6X와 동일, 전체 목록은 여기에서 확인할 수 있음) 전원 모듈 비교 차트
사양
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
64MB 8진 SPI 플래시
-
IO 프로세서: STM32F103
-
32비트 Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
온보드 센서
-
가속/자이로: BMI088
-
가속/자이로: ICM-42670-P
-
가속/자이로: ICM-42686-P
-
탄창: BMM150
-
기압계: 2x BMP388
- 하드웨어 보안 요소
- NXP 엣지락 SE051C2
- SDHC 인터페이스
- 12채널 PWM
- 8x UART
- 4x I2C
- 6배 SPI
- 3x CAN-FD
- RMII 100M 이더넷
- USB
- 오픈소스 소프트웨어 활성화
- PX4 자동 조종 장치
- NuttX RTOS
- 제퍼 RTOS
SKU20257 표준 세트/SKU258 미니 세트 포함:
-
Pixhawk 6X-RT 비행 컨트롤러 모듈
-
Pixhawk 표준 베이스/Pixhawk 미니 베이스
- PM02D HV 전력 모듈
-
케이블 세트
참조 링크:
- 펌웨어 플래싱 안내(Github)
- NXP IMXRT1176 1 GHz MCU의 PX4 - NXP
의 프레젠테이션 슬라이드 - 나.MX RT1176 – 제품 페이지 Arm® Cortex® 코어를 갖춘 1GHz 크로스오버 MCU
- EdgeLock® SE051: 업데이트 가능성 및 맞춤형 애플릿을 지원하는 입증되고 사용하기 쉬운 IoT 보안 솔루션
Related Collections