6X/6X Pro 및 NVIDIA Jetson이 포함된 Holybro Pixhawk Jetson 베이스보드 번들
6X/6X Pro 및 NVIDIA Jetson이 포함된 Holybro Pixhawk Jetson 베이스보드 번들
HolyBro
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
그만큼 홀리브로 픽스호크 제트슨 베이스보드 기반으로 설계되었습니다 Pixhawk Autopilot Bus (PAB) 오픈소스 사양 그리고 완벽하게 통합됩니다 NVIDIA Jetson Orin NX/Nano 캐리어 보드. 그 PAB 폼 팩터 PAB 비행 컨트롤러를 포함한 모든 PAB 비행 컨트롤러와 호환이 가능합니다. 픽스호크 6X. 이 보드는 다음의 컴퓨팅 능력을 결합합니다. 엔비디아 제트슨 비행 제어 기능을 갖춘 픽스호크따라서 고급 자율 주행 애플리케이션에 이상적입니다.
주요 특징
-
통합 시스템: 결합하다 픽스호크 그리고 엔비디아 제트슨 하나의 보드에.
-
원활한 연결성: Jetson과 Pixhawk는 다음을 통해 통신합니다. UART, CAN 및 이더넷 스위치.
-
광범위한 호환성: 지원합니다 Jetson Orin NX 및 Orin Nano.
-
고속 확장: 특징 2x M.2 키 슬롯 WiFi/Bluetooth 및 NVMe SSD용.
-
Pixhawk 6X 통합: 장착되어 있습니다 ICM-45686 센서 비행 제어를 강화하기 위해.
프로세서 및 센서
FMU 프로세서:
-
STM32H753
-
32비트 ARM Cortex-M7, 480MHz
-
2MB 플래시 메모리, 1MB RAM
IO 프로세서:
-
STM32F103
-
32비트 ARM Cortex-M3, 72MHz
-
64KB SRAM
온보드 센서(Rev8)
-
가속도계/자이로: 3배 ICM-45686 (BalancedGyro™ 기술 포함)
-
기압계: ICP20100 및 BMP388
-
자력계: BMM150
베이스보드 포트 및 연결
제트슨 커넥터
-
2x 기가비트 이더넷 포트 (Jetson 및 Autopilot에 연결됨 RTL8367S 이더넷 스위치)
-
2x MIPI CSI 카메라 입력 (각각 4개 차선, 22핀 라즈베리파이 캠 FFC)
-
2x USB 3.0 호스트 포트 (USB-A, 5A 전류 제한)
-
2x USB 2.0 호스트 포트 (5핀 JST-GH)
-
디버깅을 위한 USB 2.0 (USB-C)
-
미니 HDMI 출력
-
2x M.2 슬롯:
-
NVMe SSD(PCIEx4)용 키 M(2242)
-
WiFi/BT(PCIEx2, UART, USB, I2S)용 키 E(2230)
-
-
CAN 포트 (연결됨 오토파일럿 CAN2, 4핀 JST-GH)
-
SPI, I2C, I2S, UART 포트 (다양한 JST-GH 커넥터)
-
팬 전원 포트
-
전원 입력: XT30 커넥터, 7-21V(3S-4S)
-
UBEC 12A(3-14S) >4S 애플리케이션에 권장됨
자동 조종 커넥터
-
Pixhawk 자동 조종 버스 인터페이스: 100핀 & 50핀 히로세 DF40
-
중복 디지털 전원 모듈 입력
-
I2C 전원 모니터 지원
-
GPS 및 안전 스위치 포트: 10핀 & 6핀 JST-GH
-
2x CAN 포트(4핀 JST-GH)
-
3x 원격측정 포트(JST-GH, 하나는 Jetson의 UART1에 연결됨)
-
16개 PWM 출력(2x 10핀 JST-GH)
-
USB 2.0(USB-C 및 4핀 JST-GH)
-
DSM 입력(3핀 JST-ZH, 1.5mm 피치)
-
RC 입력(PPM/SBUS, 5핀 JST-GH)
-
외부 센서 버스용 SPI 포트(SPI5, 11핀 JST-GH)
-
2x 디버그 포트(FMU 및 IO, 10핀 JST-SH)
전력 요구 사항
-
입력 전압: XT30 커넥터를 통한 7-21V(3S-4S)
-
최소 전력 요구 사항: 8V/3A(주변 장치에 따라 다름)
-
중복성 및 고전압 애플리케이션을 위해 외부 UBEC 12A(3-14S) 지원
-
내장 과전압 보호 기능
치수 및 무게
-
보드 크기: 126 x 80 x 38mm (Jetson 및 비행 컨트롤러 없음)
-
무게: 203.2g (Jetson, Heatsink, Flight Controller, SSD, Wi-Fi 모듈 포함)
UBEC-12A 사양
-
입력 전압: 3~14S(XT30)
-
출력 전압: 6.0V/7.2V/8.0V/9.2V (Jetson에는 7.2V가 권장됩니다.)
-
연속 출력 전류: 12A
-
버스트 출력 전류: 24A
-
크기: 48 x 33.6 x 16.3mm
-
무게: 47.8g
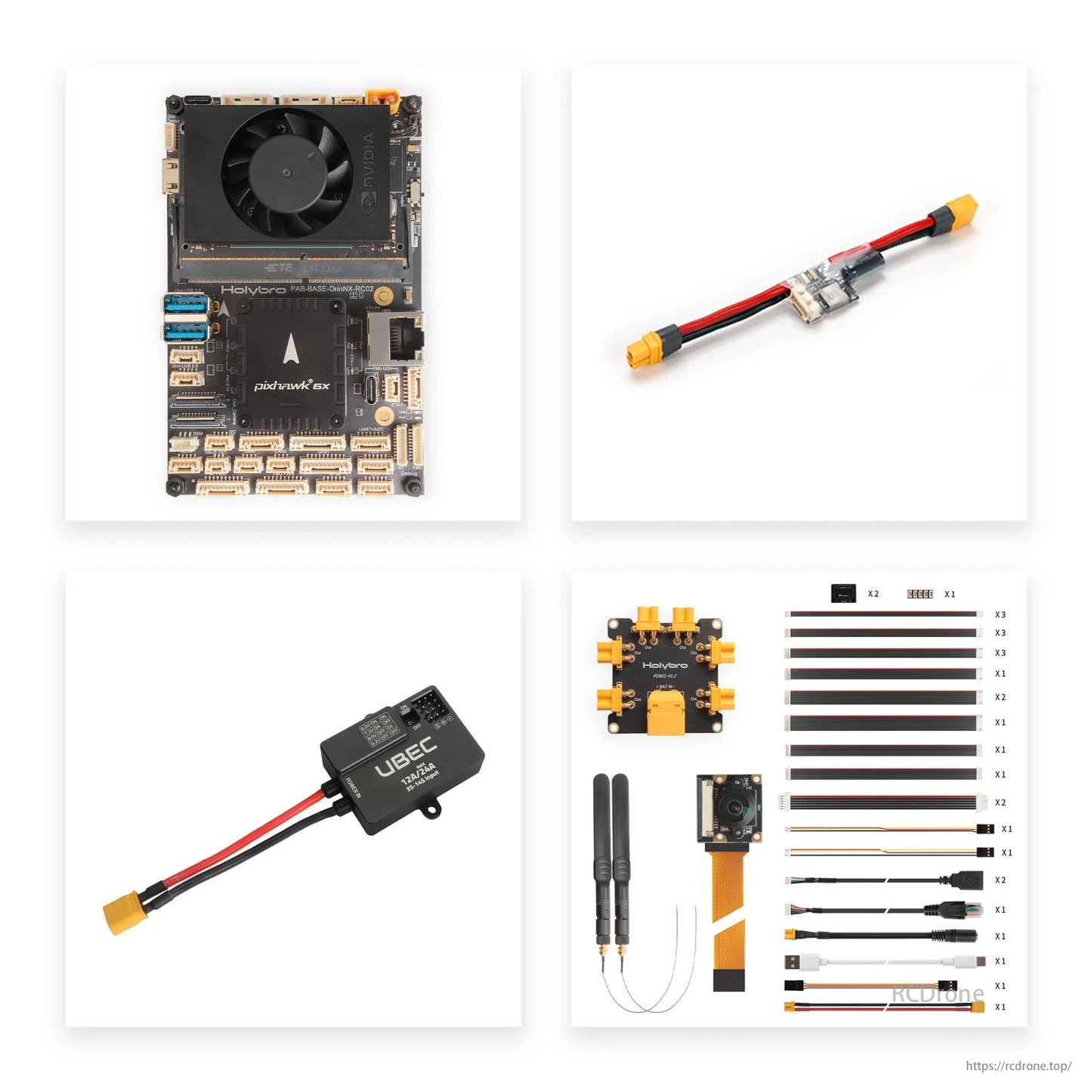
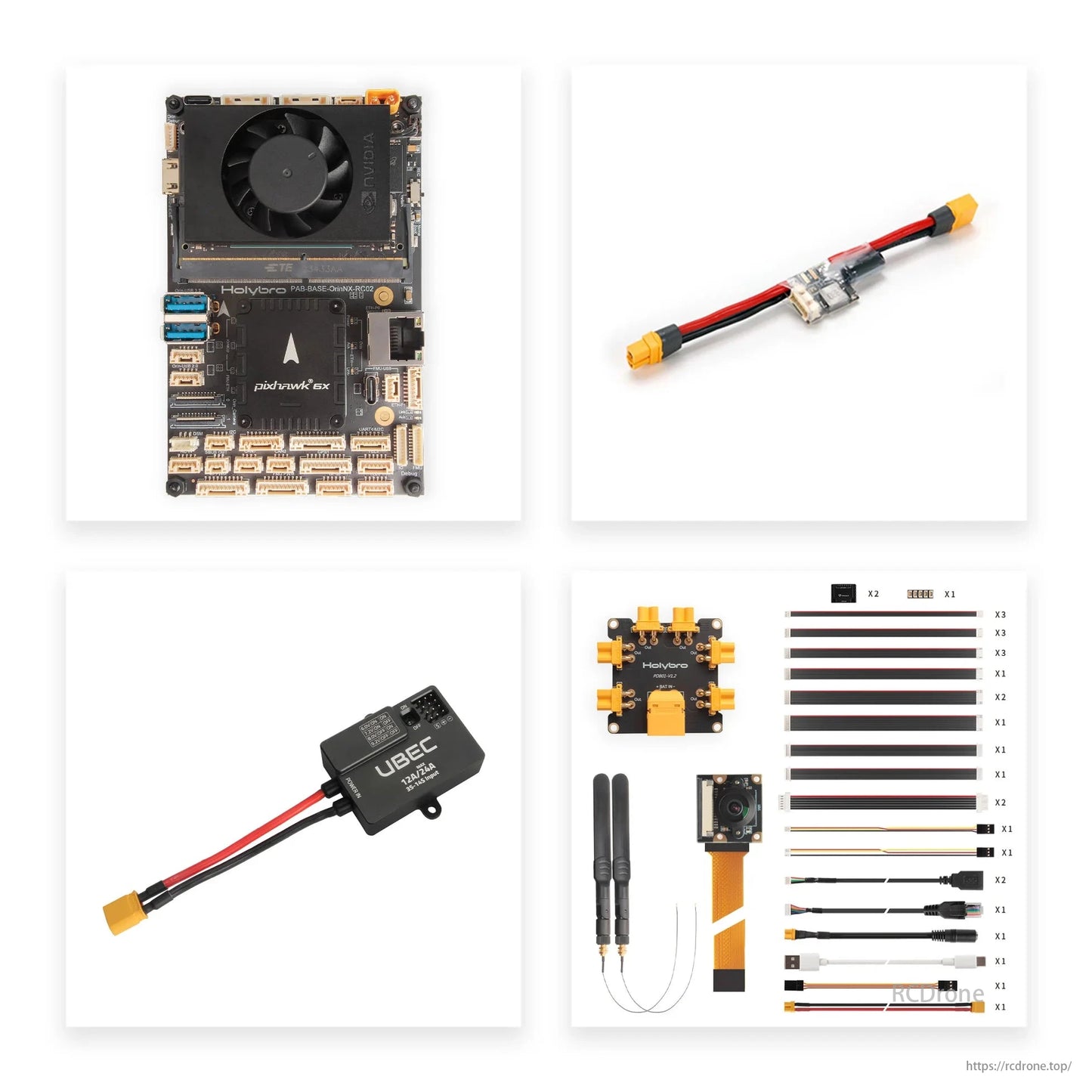
패키지 내용
Pixhawk 6X 번들
-
Pixhawk 6X (ICM-45686) 비행 컨트롤러 모듈
-
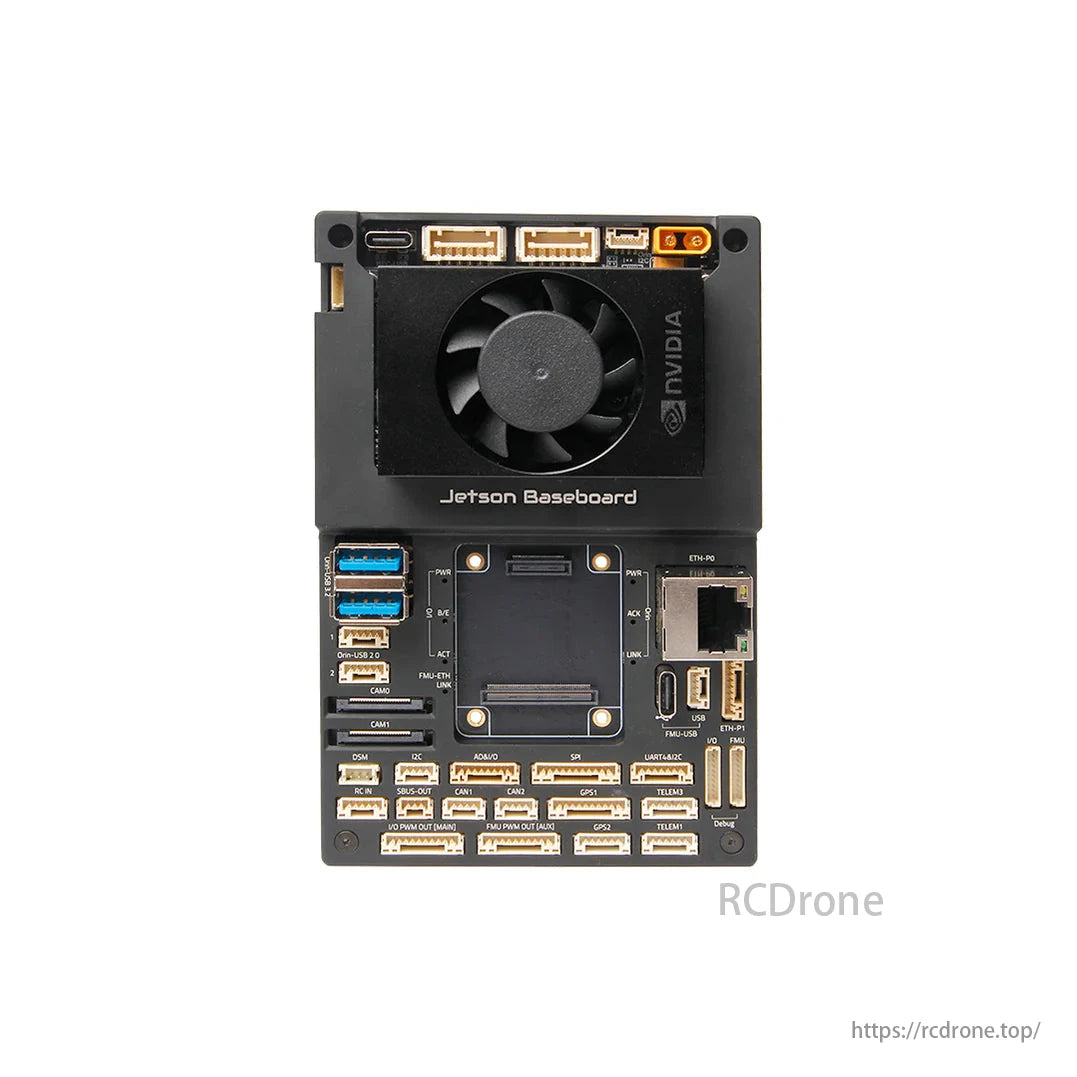
Pixhawk Jetson Orin 베이스보드
-
히트싱크 및 팬이 있는 Nvidia Orin NX(16GB RAM)/Orin Nano(4GB RAM)
-
SSD: 삼성 PM9B1 PCIe 4.0 NVMe 512GB
-
Wi-Fi 및 블루투스 모듈: 인텔 8265NGW AC 듀얼 밴드 / Realtek RTL8B22CE
-
카메라: IMX219-200
-
PM02D 전원 모듈
-
유벡 12A(3-14S)
-
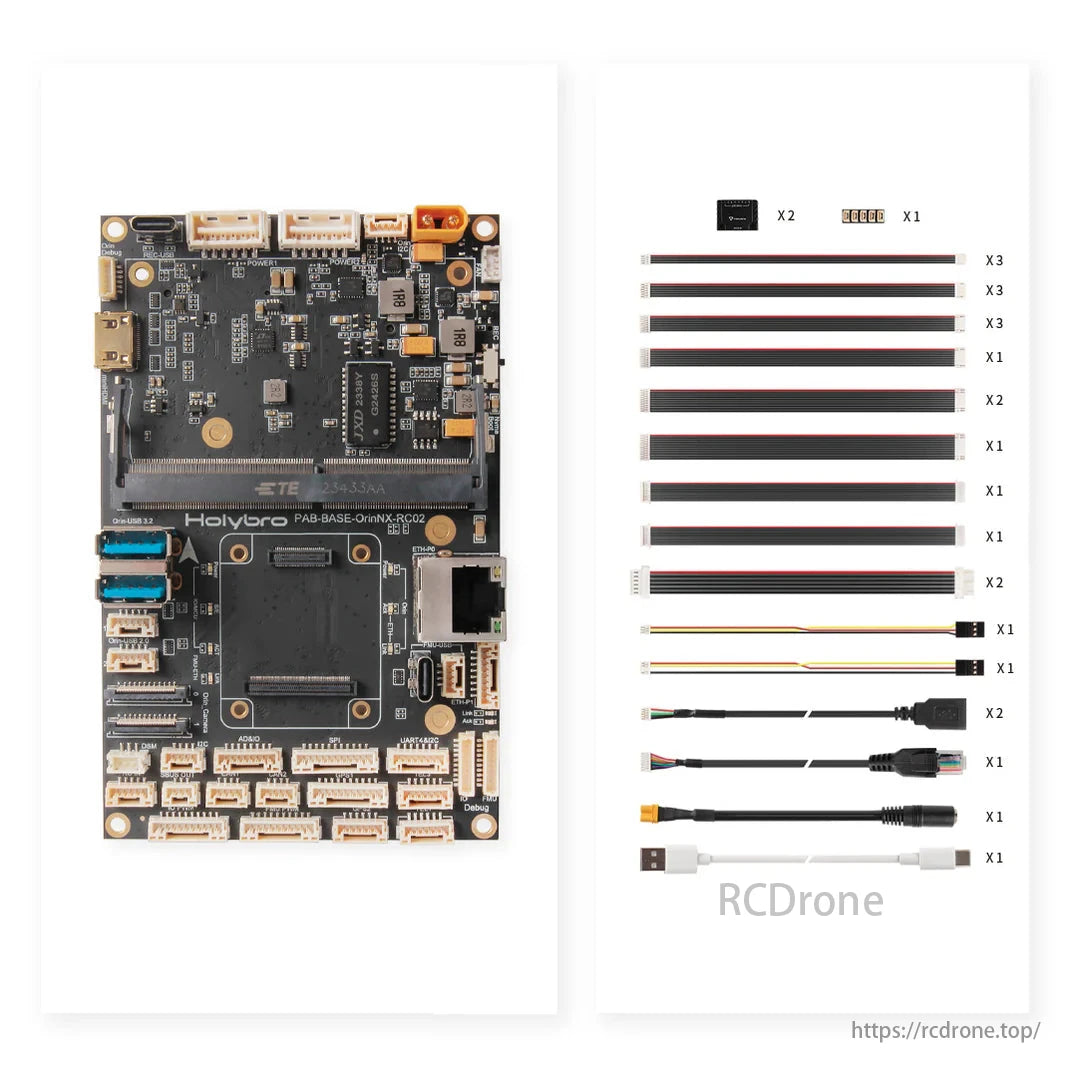
PDB 보드 및 케이블 세트
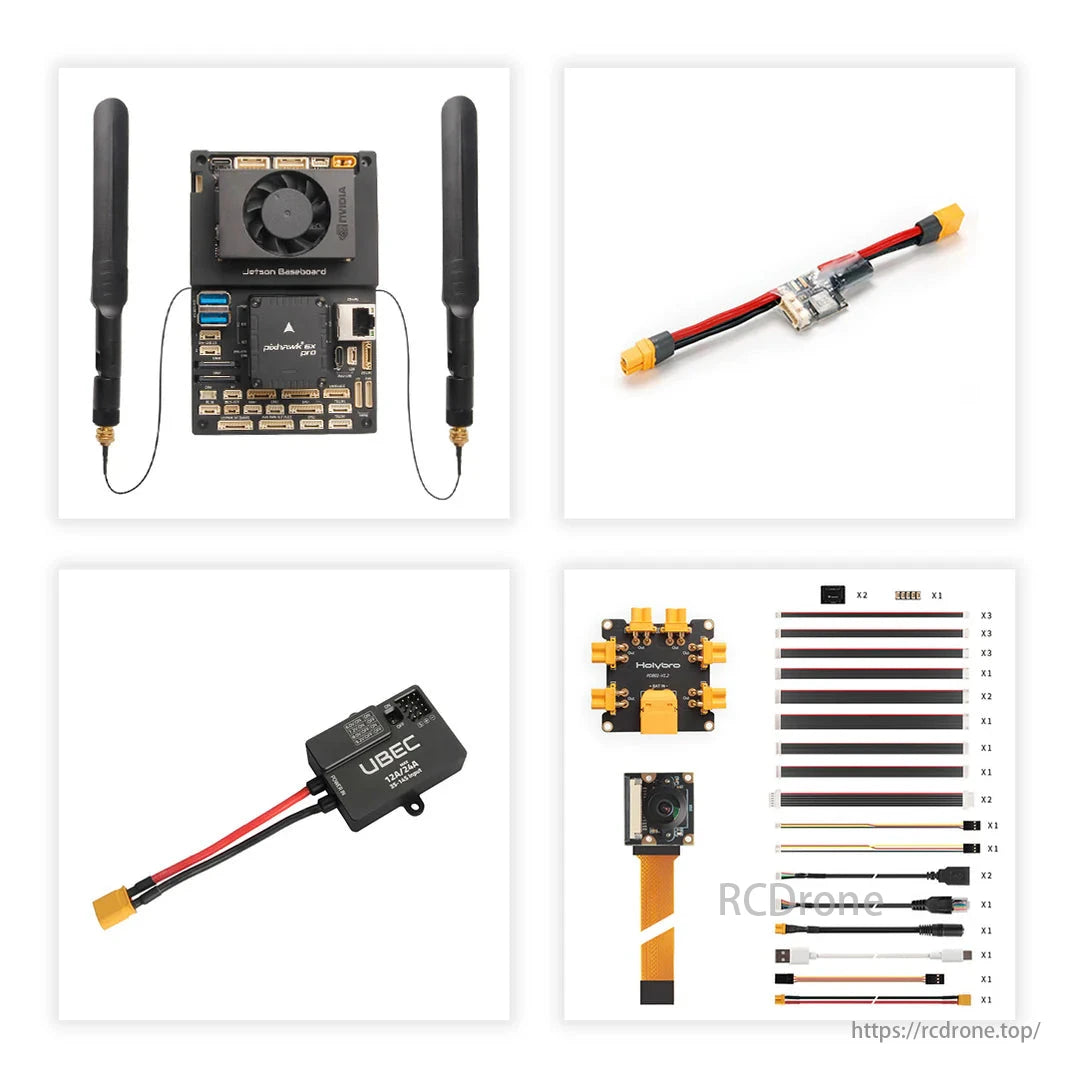
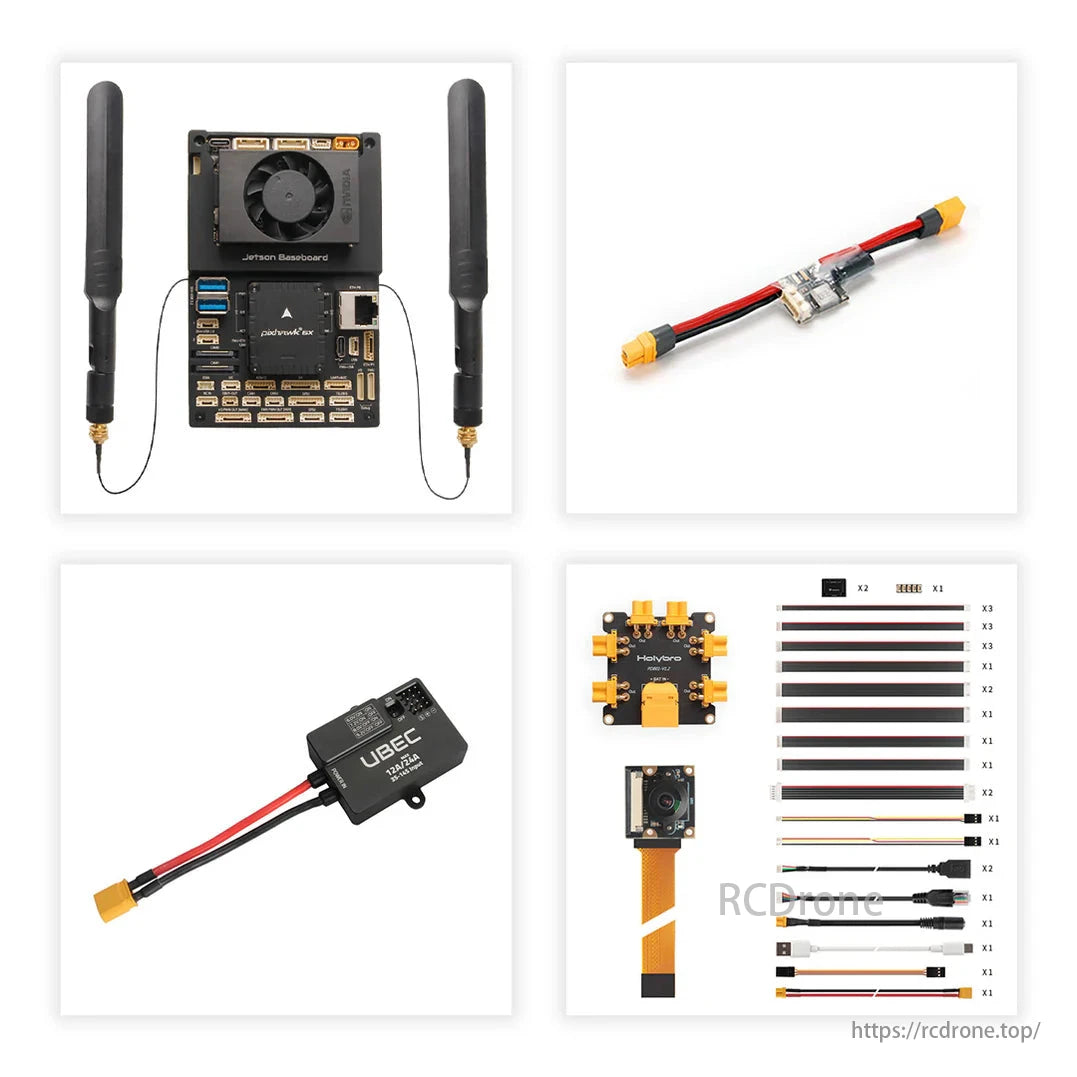
Pixhawk 6X Pro 번들
-
Pixhawk 6X Pro 비행 컨트롤러 모듈
-
Pixhawk Jetson Orin 베이스보드(케이스 포함 또는 제외)
-
히트싱크 및 팬이 있는 Nvidia Orin NX(16GB RAM)/Orin Nano(4GB RAM)
-
SSD, Wi-Fi/Bluetooth 모듈, 카메라, PM02D 전원 모듈, UBEC 12A, PDB 보드, 케이블 세트
Jetson Baseboard만
-
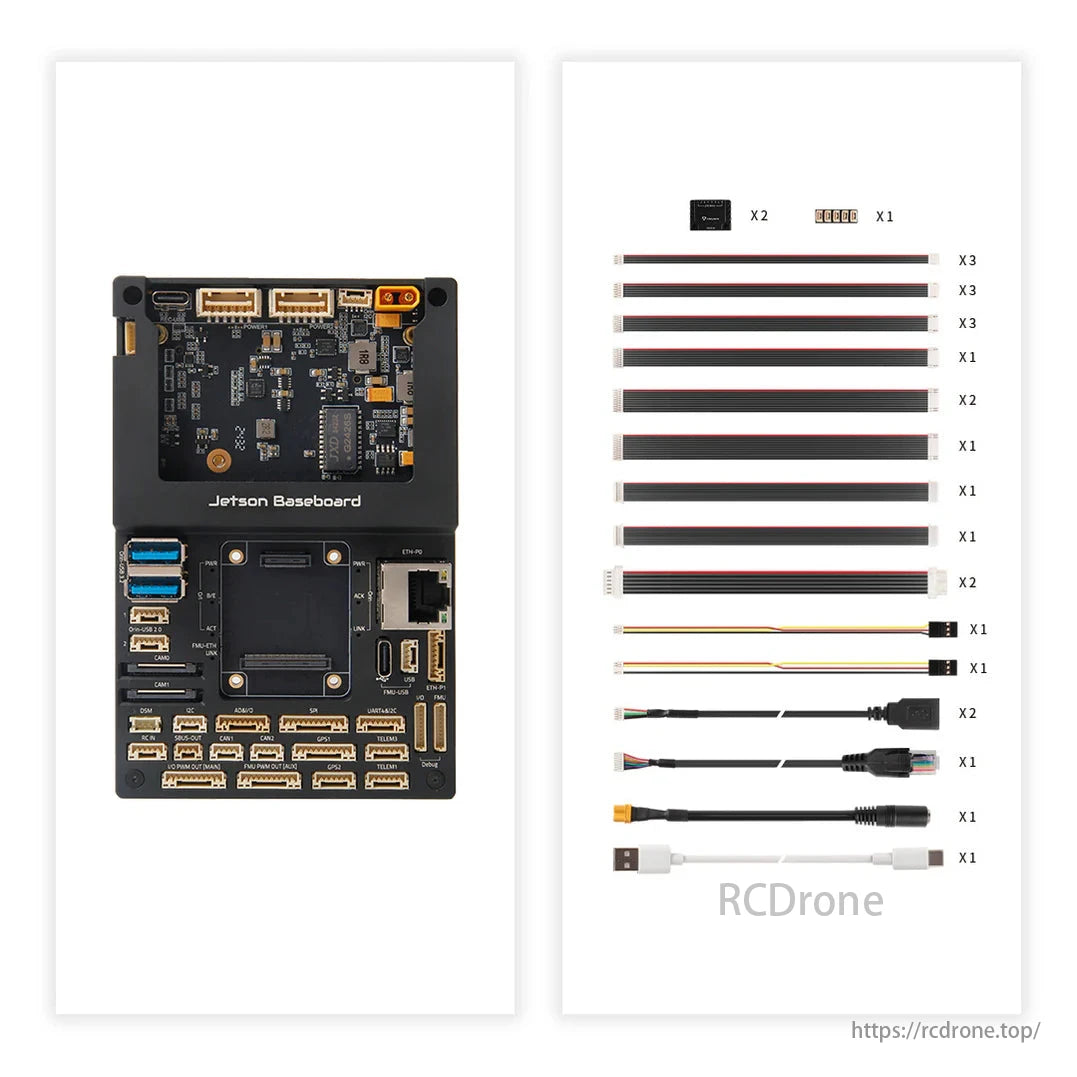
Pixhawk Jetson Orin 베이스보드(케이스 포함 또는 제외)
-
케이블 세트
참조 링크
Jetson Orin의 기본 로그인 자격 증명:
-
ID:
홀리브로 -
비밀번호:
123
세부




Pixhawk와 Nvidia Jetson이 단일 보드로 결합되었습니다.

rj45 커넥터를 사용하여 uart can 및 이더넷 스위치를 통해 연결된 nvidia jetson은 자동 조종 시스템을 위한 것입니다.
Pixhawk Autopilot Bus (PAB) 오픈 소스 사양

Jetson SoDIMM 커넥터 시스템 완벽 호환: Jetson Orin NX/Nano

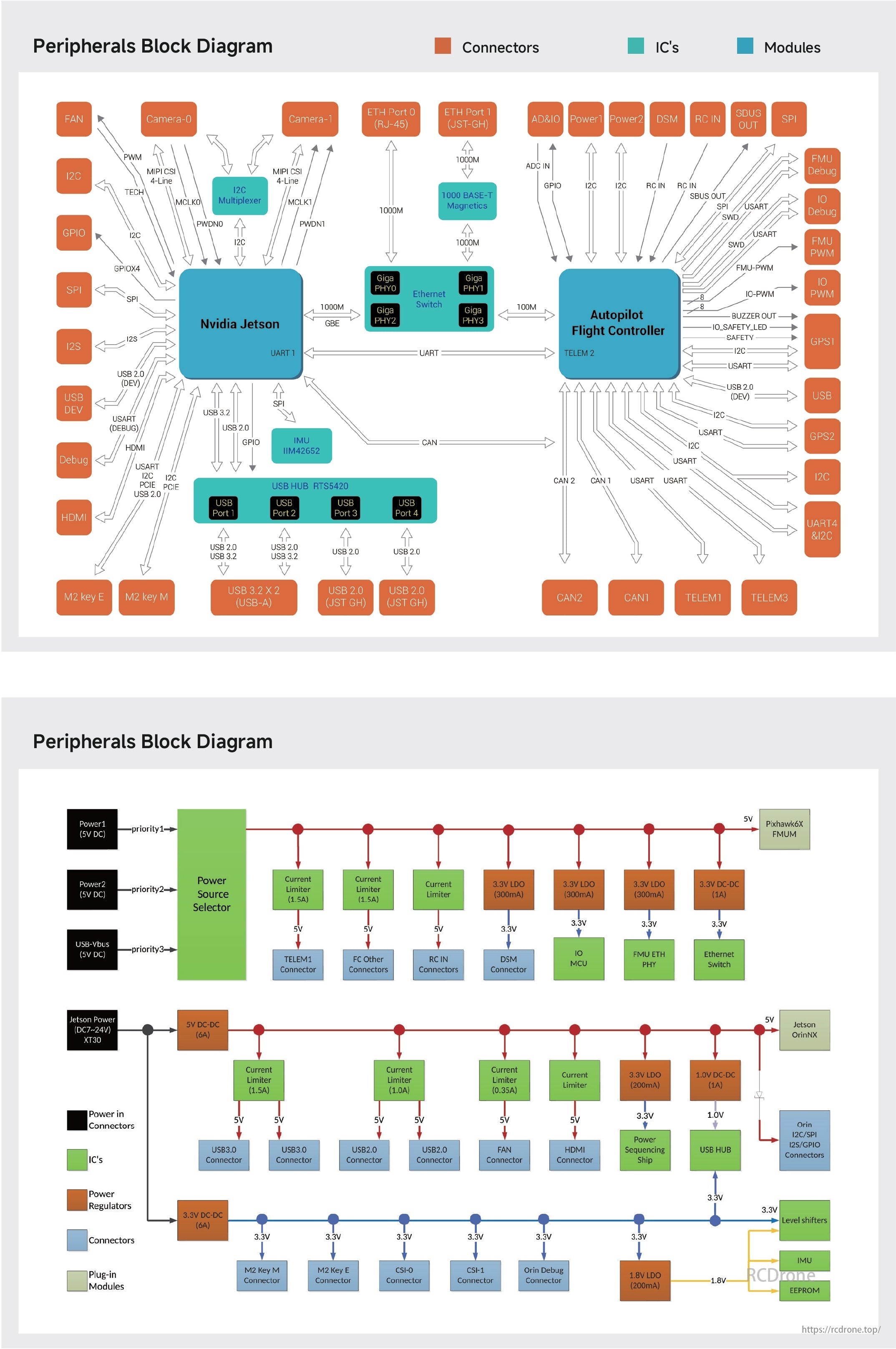
이 이미지는 Nvidia Jetson 및 Autopilot Flight Controller와 같은 구성 요소를 특징으로 하는 임베디드 시스템의 주변 장치 블록 다이어그램을 보여줍니다. 여기에는 USB 포트, 이더넷 스위치 및 전원 레귤레이터와 같은 다양한 커넥터, IC 및 모듈이 포함되어 있으며, 상호 연결 및 데이터 흐름을 보여줍니다.
참조 배선도

두 개의 다이어그램은 하나의 배터리를 사용하는 Jetson 모듈의 전력 분배 시스템을 보여줍니다. 왼쪽 다이어그램은 PM02D 전력 모듈과 전력 분배 보드를 사용하는 반면, 오른쪽 다이어그램은 4S보다 큰 배터리에 대한 외부 UBEC를 포함합니다.두 가지 설정 모두 Jetson과 Pixhawk Power의 적절한 전압 조절을 보장합니다.
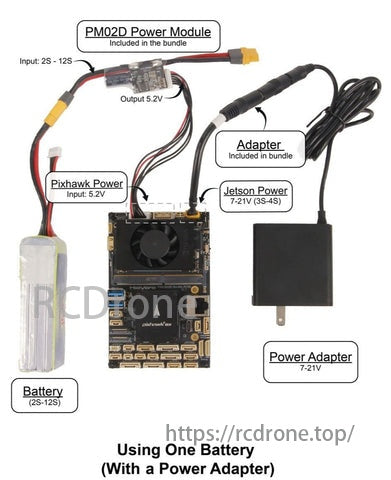
PM02D 전원 모듈은 7~21V 입력용 전원 어댑터와 함께 배터리 하나를 사용하여 배터리를 Pixhawk와 Jetson에 연결합니다.
Related Collections