Holybro X500 v2 PX4 개발 키트 - Holybro Pixhawk 6C/6X, M8N GPS, SiK 원격 측정 라디오, 산업용 드론을 갖춘 탄소 섬유 드론 키트
Holybro X500 v2 PX4 개발 키트 - Holybro Pixhawk 6C/6X, M8N GPS, SiK 원격 측정 라디오, 산업용 드론을 갖춘 탄소 섬유 드론 키트
HolyBro
정가
$769.00 USD
정가
할인가
$769.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
PX4 개발 키트 - X500 v2는 최신 Holybro Pixhawk 6C 또는
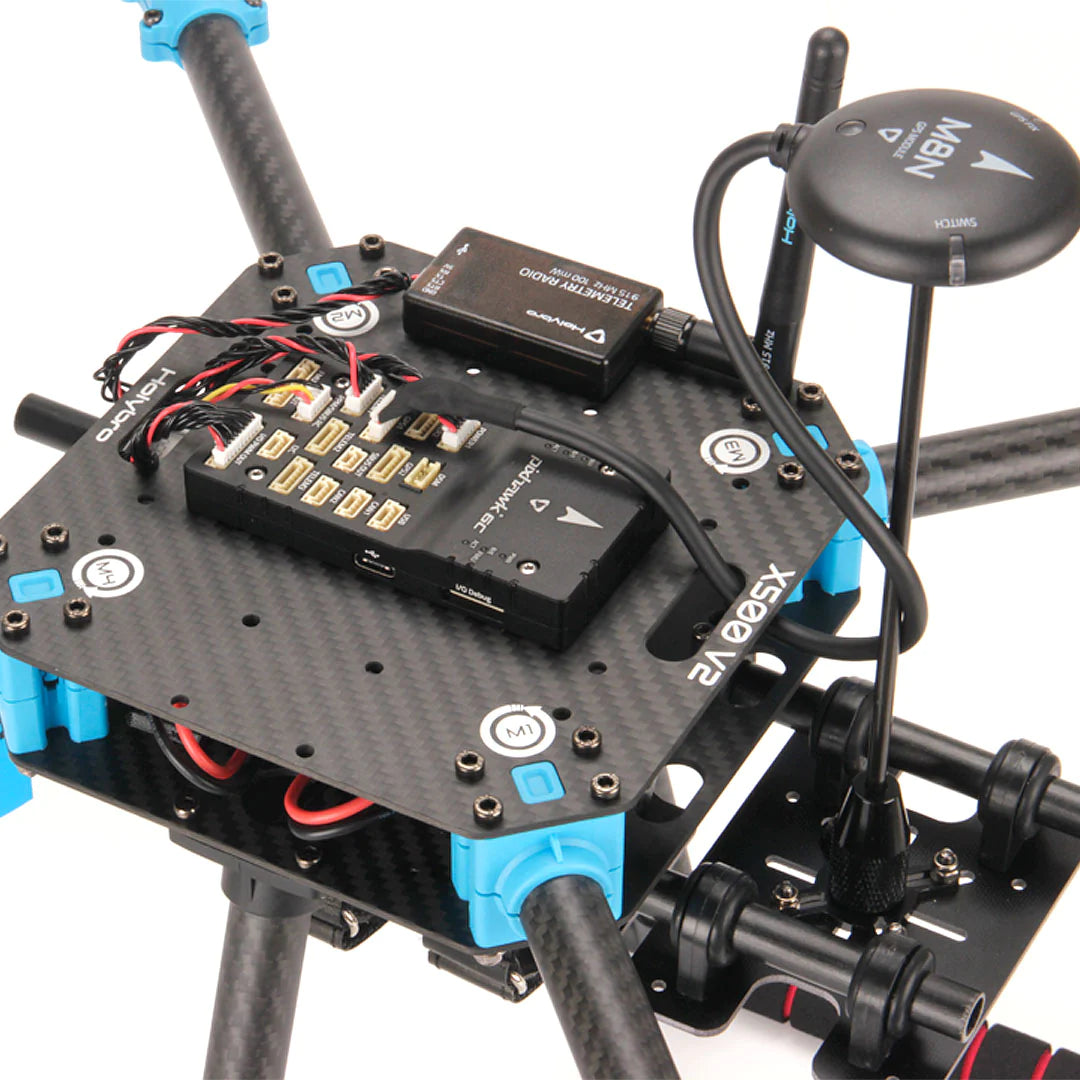
프레임(X500 v2)은 완전 탄소 섬유 능직 소재로 제작되었으며, 새로 설계된 섬유 강화 나일론 커넥터로 지지되는 탄소 섬유 튜브 암과 편리한 노치가 있습니다. 모터와 본체 측면 모두 훨씬 쉽고 간단한 설치를 제공합니다. 랜딩 기어는 두꺼워지고 강화된 커넥터가 있는 16mm 및 10mm 직경의 탄소 섬유 튜브로 구성됩니다.
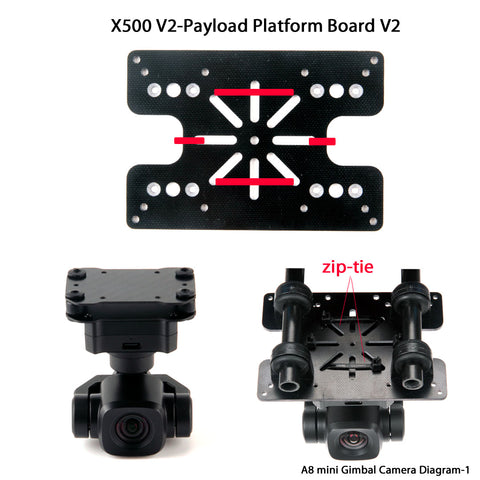
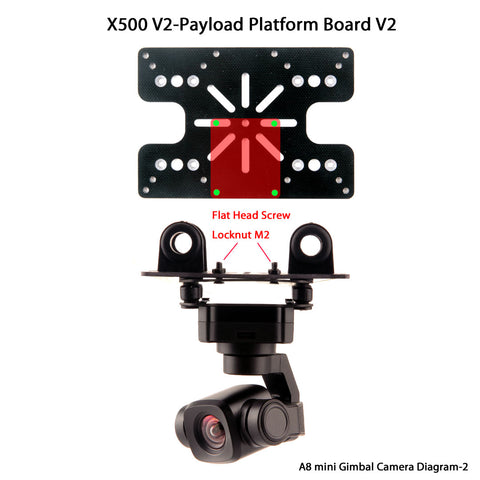
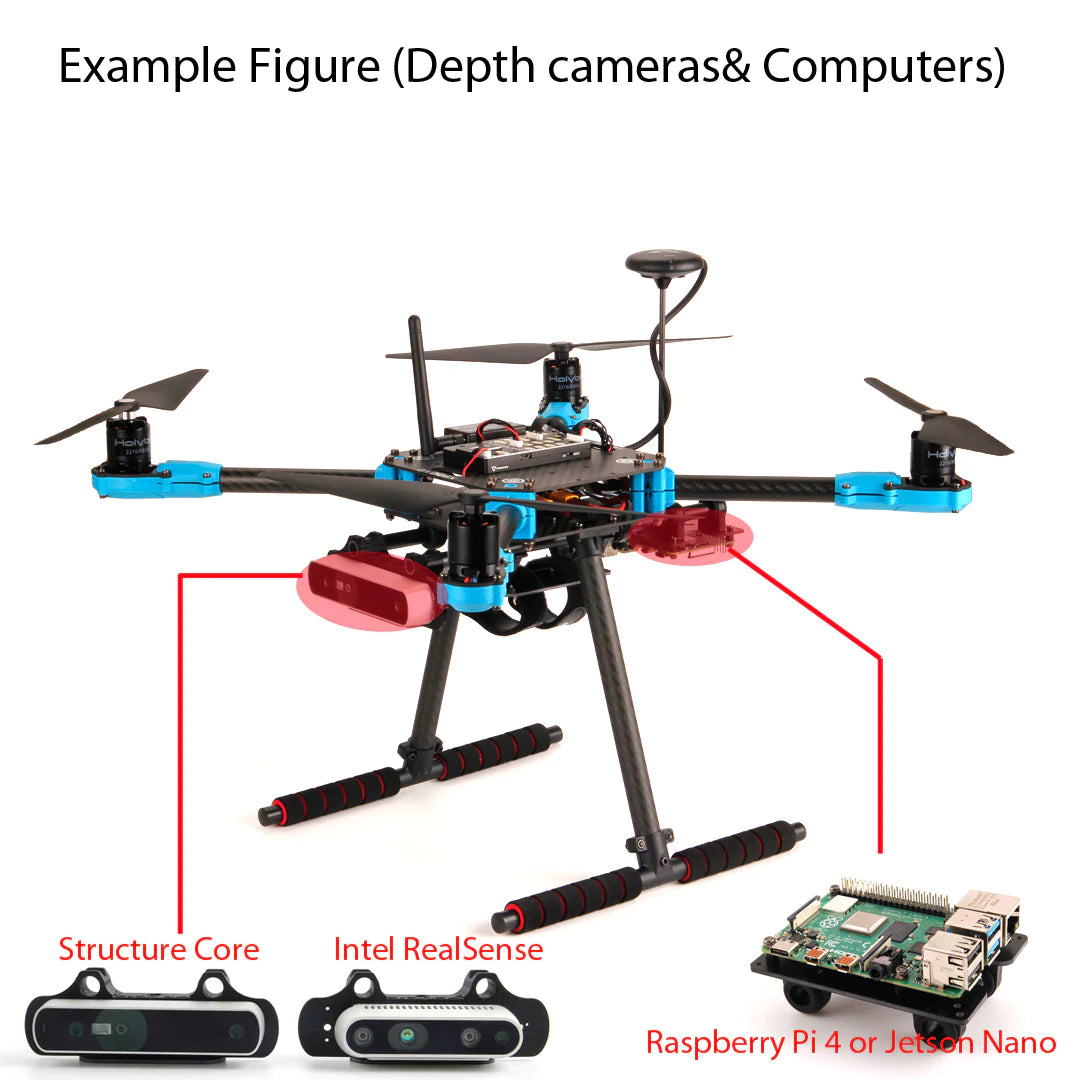
플랫폼 보드에는 이제 GPS 및 Raspberry Pi 4 및 Jetson Nano와 같은 인기 있는 컴패니언 컴퓨터를 위한 장착 구멍이 있습니다. Intel RealSense 시리즈 및 구조 코어 깊이 카메라와 같은 다양한 깊이 카메라를 위한 옵션 깊이 카메라 마운트(별도 구매)가 있습니다. 상하단 탄소섬유판 사이의 간격을 늘려 접근이 용이하도록 하였습니다. 조정 가능한 배터리 장착 보드는 더 긴 비행 시간을 위해 더 큰 배터리를 지원하도록 확대되었습니다. 레일 장착 시스템은 다양한 용도에 맞게 다양한 카메라 마운트와 짐벌을 사용할 수 있습니다. 설치에 필요한 모든 도구는 패키지에 제공됩니다.
참고: Pixhawk 6C Flight 컨트롤러는 PX4 및 Ardupilot 모두와 호환되지만 PX4 오픈 소스 Autopilot 펌웨어와 함께 배송됩니다.
기능:
- 완전히 새로운 Pixhawk 6C 또는Pixhawk 6X 비행 컨트롤러M10GPS 모듈 및 플러그 앤 플레이 SiK 원격 측정 라디오 포함
- 최소 조립 시간(~30분), 납땜이 필요 없는 새로운 프레임 디자인
- 섬유 강화 나일론 커넥터가 포함된 탄소 섬유 프레임으로 쉽고 간편한 설치 가능
- PDB용 간단한 XT30 전원 플러그가 포함된 사전 설치된 모터 및 ESC
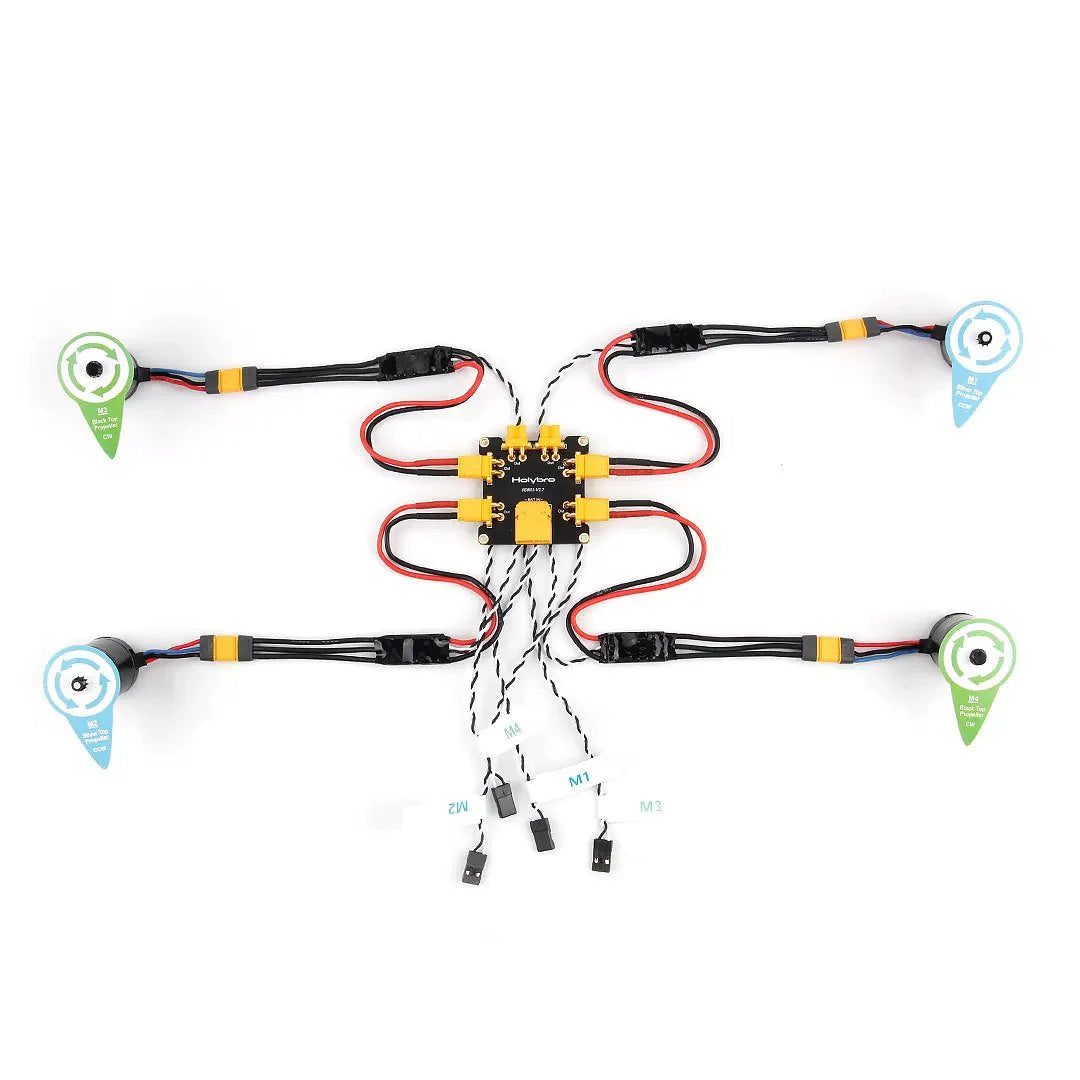
- XT60 및 XT30 플러그가 있는 배전반(PDB)
- Raspberry Pi 및 Nvidia Jetson Nano와 같은 보조 컴퓨터용 마운트
- Intel RealSense 및 Structure Core용 심도 카메라 마운트 옵션
참고:
- 이제 Pixhawk 6X 버전은 PM02D-HV(고전압) 버전과 함께 배송됩니다. PX4에서는 이 기능을 활성화하려면 SENS_EN_INA228을 설정해야 합니다. 이 HV 버전은 ardupilot 4.4 이상에서만 지원됩니다. 설정 가이드는 여기 에서 확인할 수 있습니다.
-
M10 GPS에 대한 펌웨어 지원: PX4 1.14 및 ArduPilot 4.3 이상이 필요합니다.
PX4 개발 키트 - X500 v2 포함 내용:
- 자동 조종 장치 비행 컨트롤러: Pixhawk 6C(플라스틱 케이스) & PM02 V3 또는 Pixhawk 6X(표준 베이스) 및 PM02D
- M10 GPS 모듈
- SiK 원격 측정 라디오 V3 433/915MHz
- X500 V2 프레임 키트(SKU30120)
-
사전 설치된 항목:
- 모터 - XT30 플러그가 포함된 Holybro 2216 KV920 모터(4개)(모터 사양은 여기에서 확인할 수 있습니다.)
- ESC - BLHeli S ESC 20A(4개), XT30 플러그 포함 - 4S 배터리와 호환 가능
- 프로펠러 1045개(6개)
- 배전판(배터리용 XT60 플러그 및 ESC 및 주변 장치용 XT30 플러그)
-
기타 선택 품목(별도 판매)
- RadioMaster TX16S RC 컨트롤러
- RadioMaster R81 수신기
- 심도 카메라 마운트
X500 V2 프레임 키트 세부 정보(SKU30120):
- 본체 - 전체 탄소섬유 상하판(144 x 144mm, 두께 2mm)
- 암 - 새롭게 설계된 섬유 강화 나일론 커넥터가 포함된 고강도 및 초경량 16mm 탄소 섬유 튜브
- 랜딩 기어 - 강화되고 개선된 플라스틱 티 커넥터가 있는 16mm 및 10mm 직경의 탄소 섬유 튜브.
- 플랫폼 보드 - GPS 및 Raspberry Pi 4 및 Jetson Nano와 같은 널리 사용되는 컴퓨터용 장착 구멍이 있음
- 이중 10mm Ø 로드 x 250mm 길이 레일 장착 시스템
- 두 개의 배터리 스트랩이 있는 배터리 마운트
- 설치용 수공구
기계 사양:
- 휠베이스: 500mm
- 모터 마운트 패턴: 16x16mm
- 프레임 본체: 144x144mm, 두께 2mm
- 랜딩 기어 높이: 215mm
- 상단 플레이트와 하단 플레이트 사이의 공간: 28mm
- 무게: 610g
- 비행 시간: 추가 페이로드 없이 호버링 최대 18분. 5000mAh 배터리로 테스트했습니다.
- 페이로드: 1500g(배터리 제외, 70% 스로틀)
- 배터리 권장 사항: XT60 Lipo 배터리 포함 4S 3000-5000mAh 20C+(포함되지 않음)

X500 v2 조립 안내서
참조:
모터 사양
3D 인쇄:
Holybro_X500_V2_3D 인쇄설정 가이드:
idorobotics 기사
PX4 설정 안내서
Ardupilot 설정 가이드
몇 가지 팁: