



Inspire Robots RH56BFX 6자유도, 12관절, 통합 힘 센서, 3KG 출력의 산업용 & 연구용 다관절 로봇 핸드
Inspire Robots RH56BFX 6자유도, 12관절, 통합 힘 센서, 3KG 출력의 산업용 & 연구용 다관절 로봇 핸드
Inspire Robots
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
RH56BFX 시리즈 다재다능 로봇 손은 인간과 유사한 동작과 다양한 응용을 위해 설계된 고속, 고정밀 5손가락 로봇 손입니다. 6 자유도와 12 관절을 갖추고 있어 상호작용 시연, 제스처 시뮬레이션 및 복잡한 조작 작업을 위한 자연스러운 손 움직임을 재현합니다. 통합된 힘 및 촉각 센서는 정밀한 제어와 적응성을 보장하여 산업, 상업 및 연구 환경에 적합합니다.
주요 특징
-
인간과 유사한 크기와 구조 – 자연스러운 상호작용을 위해 성인 인간 손의 치수를 모방합니다.
-
통합된 힘 및 촉각 센서 – 정확한 그립 강도와 민감한 촉각 피드백을 가능하게 합니다.
-
고속 응답 – 최대 570°/s의 손가락 굽힘 속도를 달성하여 민첩한 작업을 지원합니다.
-
서브 밀리미터 위치 조정 – ±0.20 mm의 반복 정밀도로 안정적이고 정확한 동작을 보장합니다.
-
높은 출력 강도 – 단일 손가락 출력 최대 3 kg 및 최대 그립 힘 6 N을 제공합니다.
-
내구성 – 백만 회 이상의 작동 주기를 위해 설계되었습니다.
-
산업용 등급 인터페이스 – RS485 통신 및 24V DC 전원 입력으로 원활한 통합을 지원합니다.
기술 사양
| 매개변수 | 사양 |
|---|---|
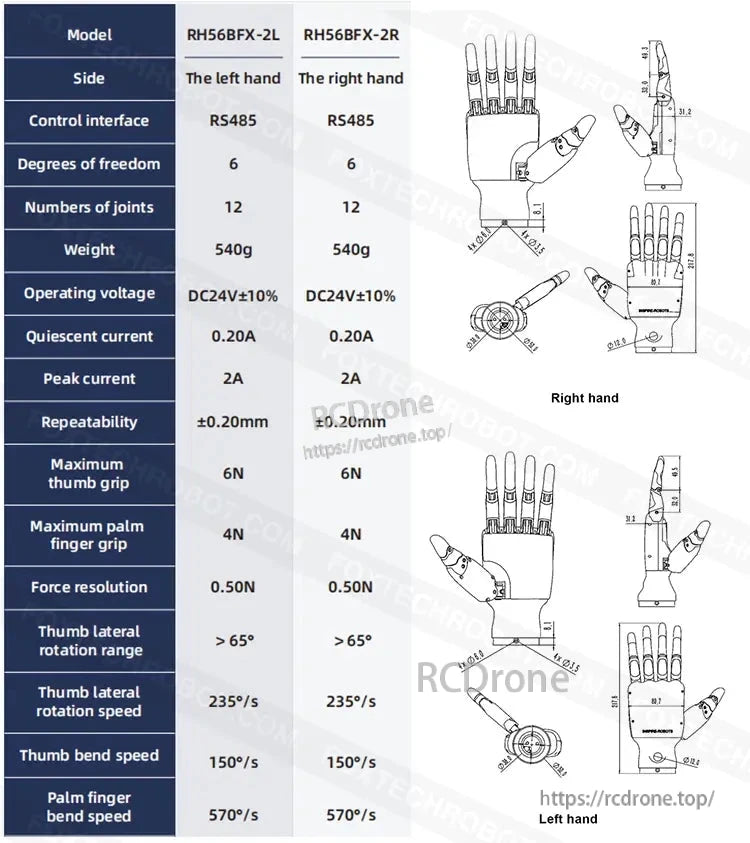
| 시리즈 | RH56BFX |
| 모델 | RH56BFX-2L (왼쪽) / RH56BFX-2R (오른쪽) |
| 자유도 | 6 |
| 관절 수 | 12 |
| 무게 | 540 g |
| 제어 인터페이스 | RS485 |
| 작동 전압 | DC 24V ±10% |
| 정적 전류 | 0.2 A |
| 최대 전류 | 2 A |
| 위치 반복 정확도 | ±0.20 mm |
| 최대 그립 힘 – 엄지 | 6 N |
| 최대 그립 힘 – 네 손가락 | 4 N |
| 그립 힘 해상도 | 0.50 N |
| 엄지 회전 범위 | >65° |
| 엄지 스윙 속도 | 235°/s |
| 엄지 굽힘 속도 | 150°/s |
| 네 손가락 굽힘 속도 | 570°/s |
응용 분야
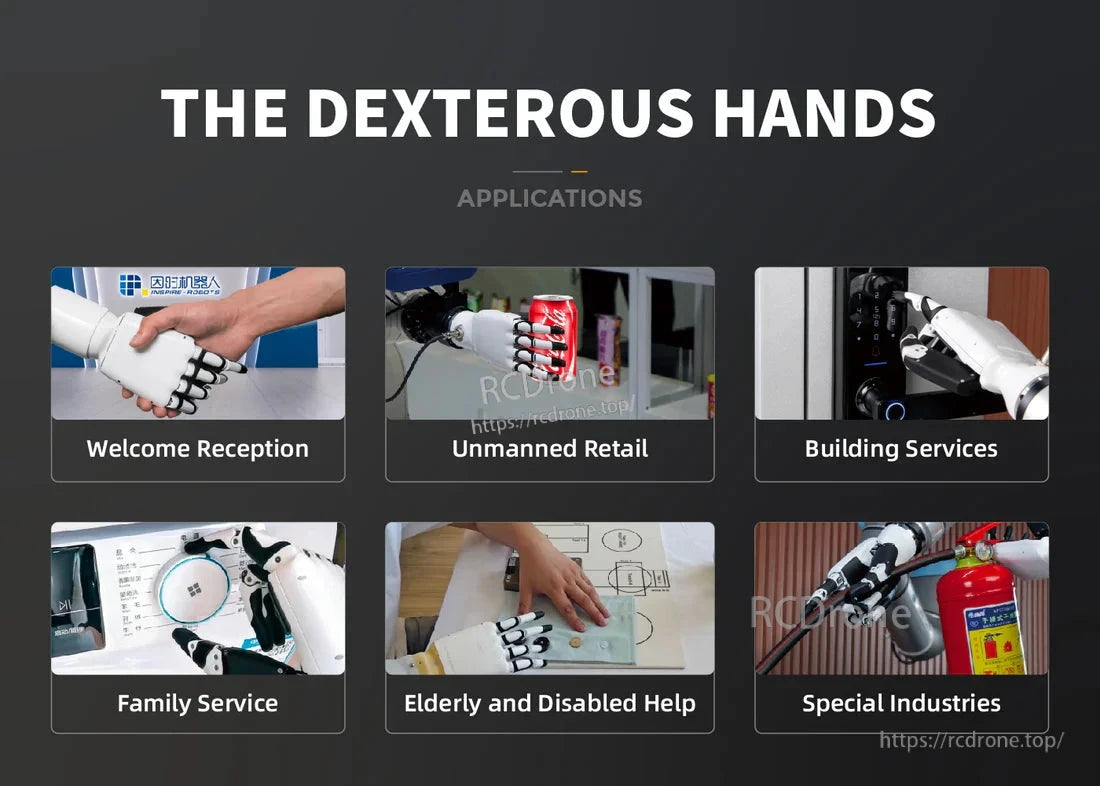
RH56BFX 다재다능한 손은 다음과 같은 다양한 분야에 적합합니다:
-
환영 리셉션 – 손님을 맞이하기 위한 인간-로봇 상호작용.
-
무인 소매 – 자동화된 매장에서 물품을 집고 놓기.
-
건물 서비스 – 서비스 환경에서 스위치, 노브 및 도구 작동.
-
가족 서비스 – 일상 가사 작업 지원.
-
노인 및 장애인 지원 – 도움이 필요한 분들을 위한 지원 및 상호작용 제공.
-
특수 산업 – 전문적이거나 위험한 환경에서의 복잡한 작업.
세부사항

Biohand RH56BFX 다재다능한 로봇 손, 더 빠른 속도, 정밀 작업을 위한 고급 디자인.

6 자유도, 12 관절, 서브 밀리미터 반복 정밀도, 힘 센서 및 여러 kg의 하중 용량을 갖춘 다재다능한 로봇 손.

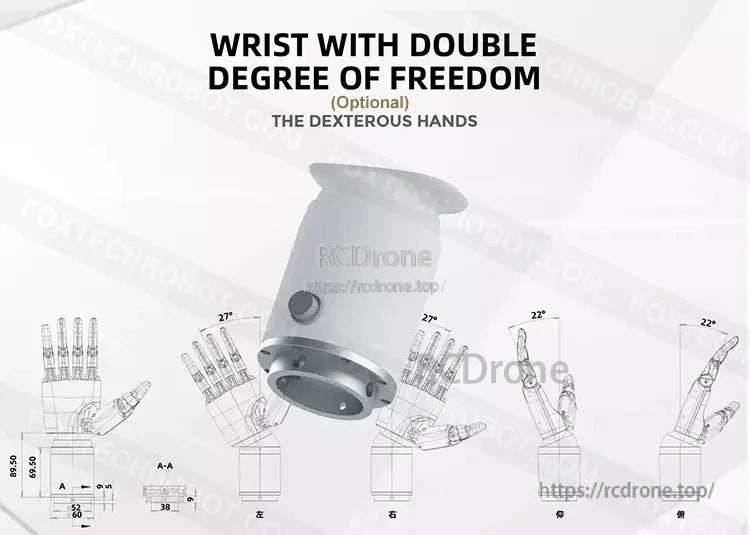
이중 자유도 손목, 선택 가능한 다재다능한 손, 27° 및 22° 회전 각도, 상세한 기술 도면 포함.

접수, 소매, 서비스, 가정, 노인 지원 및 특수 산업에서의 능숙한 로봇 손 응용.



