


인스파이어 로봇 RH56DFTP 다관절 로봇 핸드 – 6축, 30N 그립력, 촉각 & 힘 센서, ModbusTCP+CAN 제어
인스파이어 로봇 RH56DFTP 다관절 로봇 핸드 – 6축, 30N 그립력, 촉각 & 힘 센서, ModbusTCP+CAN 제어
Inspire Robots
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
Inspire Robots RH56DFTP 지능형 생체 로봇 손은 고급 로봇 응용 프로그램을 위해 설계된 고정밀 다섯 손가락의 손입니다. 6 자유도, 12 관절, 6개의 힘 센서와 17개의 촉각 센서의 조합을 특징으로 하여 인간과 유사한 손재주와 촉각 인식을 제공합니다. 손끝 힘은 30N (≈3 kg per finger)이며, 고속 각 운동과 원활한 ModbusTCP+CAN (RS485) 통신을 통해 이 손은 연구, 산업 자동화 및 생체 로봇 공학에 이상적입니다.
주요 특징
-
인간과 유사한 촉각 정밀도: 통합된 촉각 센서는 정확한 물체 조작을 위한 실시간 인식을 제공합니다.
-
강력하고 안정적인 그립: 각 손가락은 최대 3 kg의 작동력을 제공하여 다양한 물체를 신뢰성 있게 잡을 수 있습니다.
-
전원 손실 자동 잠금: 전원이 꺼져도 위치를 유지하여 시작 시 재제로가 필요 없습니다.
-
고속 작동: 엄지 움직임이 130°/s를 초과하며, 네 손가락의 움직임은 200°/s에 도달하여 반응성이 뛰어난 제어를 제공합니다.
-
내구성과 신뢰성: 연구실, 로봇 플랫폼 및 산업 환경에서 장기 사용을 위해 설계되었습니다.
사양
| 매개변수 | 값 |
|---|---|
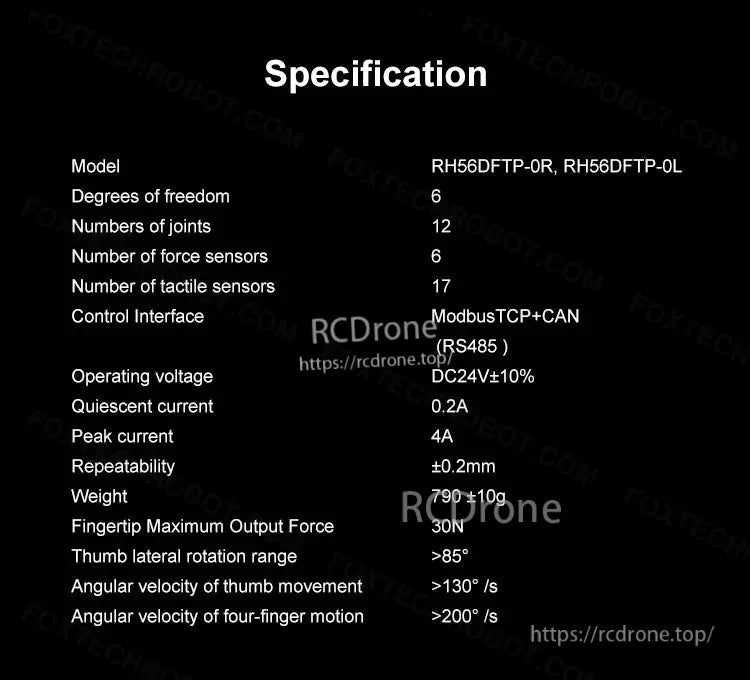
| 모델 | RH56DFTP-0R, RH56DFTP-0L |
| 자유도 | 6 |
| 관절 수 | 12 |
| 힘 센서 | 6 |
| 촉각 센서 | 17 |
| 제어 인터페이스 | ModbusTCP + CAN (RS485) |
| 작동 전압 | DC 24V ±10% |
| 대기 전류 | 0.2A |
| 최대 전류 | 4A |
| 재현성 | ±0.2mm |
| 무게 | 790g ±10g |
| 손끝 최대 출력 힘 | 30N (≈3 kg) |
| 엄지 측면 회전 범위 | >85° |
| 각속도 – 엄지 | >130°/s |
| 각속도 – 네 손가락 | >200°/s |
응용 분야
-
연구 및 개발: 대학 및 연구소의 첨단 로봇 연구.
-
산업 자동화: 고정밀 조립 및 취급 작업.
-
생체 모방 솔루션: 의수 연구 및 휴머노이드 로봇.
-
AI 및 머신 러닝: 정확한 실시간 피드백이 필요한 촉각 감지 및 조작 프로젝트.
주요 특징
RH56DFTP는 블루베리, 체리 토마토 또는 포도를 손상 없이 집는 것과 같은 정밀한 힘 제어 및 섬세한 작업이 필요한 작업에서 뛰어난 성능을 발휘합니다. 또한 강력한 산업 응용을 위한 고강도 그립을 처리하여 복잡한 조작 작업을 위한 다재다능한 솔루션이 됩니다.
상세 정보
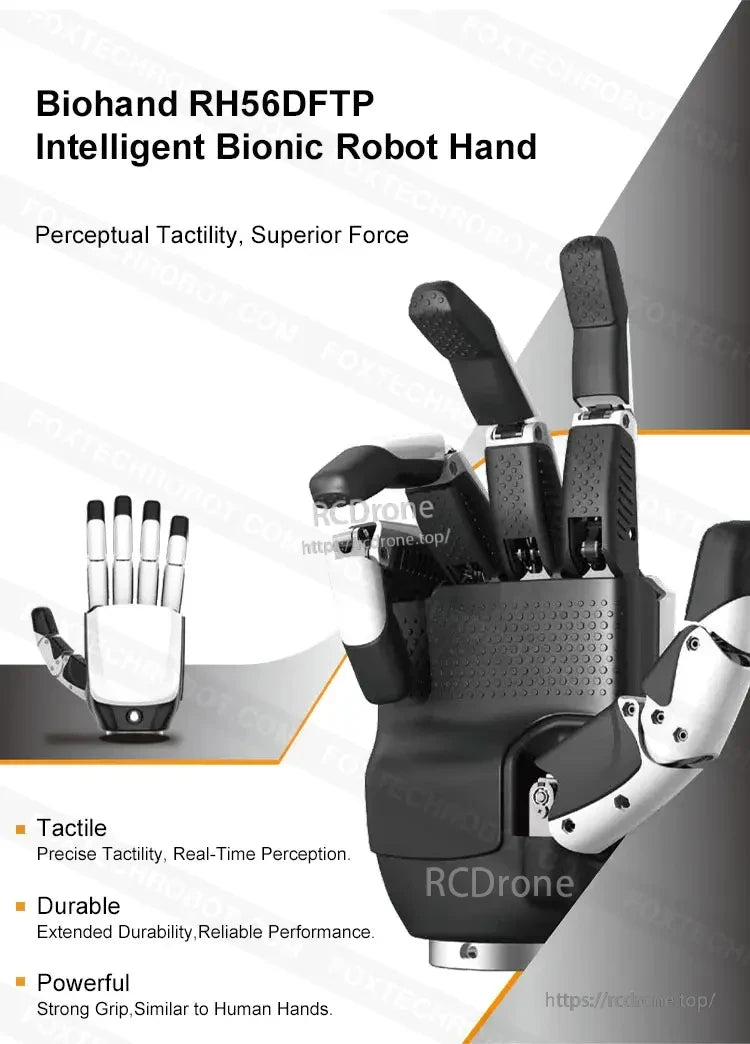
Biohand RHS6DFTP 지능형 생체 로봇 손은 지각적 촉각, 우수한 힘 및 실시간 정밀 촉각을 제공하며, 신뢰할 수 있는 성능을 위한 내구성이 뛰어난 연장된 내구성과 인간의 손과 유사한 강력한 그립을 자랑합니다.

정밀성과 손재주를 위해 설계된 여섯 개의 자유도를 가진 로봇 손으로, 수술, 조립 또는 실험실 작업과 같은 다양한 응용에 적합합니다.

강력한 그립, 인간과 유사한 성능. 손가락당 3kg의 작동력.정교한 디자인과 정밀 엔지니어링을 갖춘 능숙한 로봇 손.


전력 손실 자가 잠금 메커니즘은 시작 또는 종료 시 재제로가 필요 없이 안정적이고 신뢰할 수 있는 위치를 유지합니다.


힘 센서가 장착된 다기능 핸드 툴로, 블루베리, 체리 토마토, 포도와 같은 작은 과일을 집고 집는 데 적합합니다.

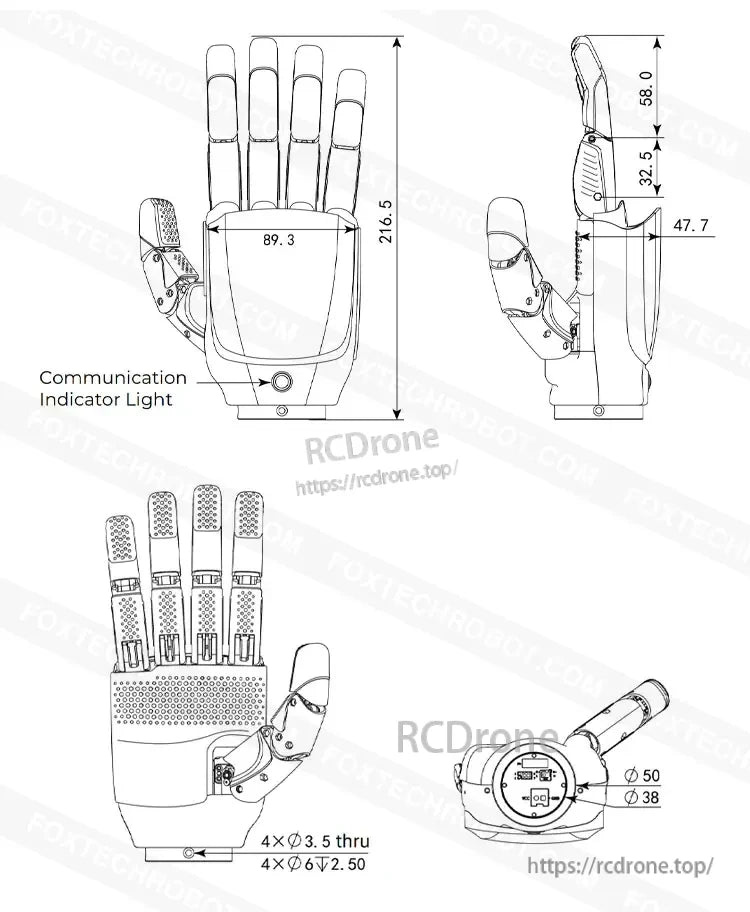
통신 표시등, 8 x 47.7 mm, 89 mm 길이, LED 없음, 5x5: 38-4x03.5에서 4xp6v2, 50 옴, 2층
RHS6DFTP-OR 및 RHS6DFTP-OL 사양 모델은 3 자유도, 12 관절 및 17 힘 센서와 촉각 센서를 특징으로 합니다. DC24V +10% 작동 전압을 사용하는 Modbus TCP+CAN (RS485) 제어 인터페이스를 사용합니다.





