



인스파이어 로봇 RH56DFX 다관절 로봇 핸드 – 6축, 12관절, 30N 그립력, RS485, 힘 & 촉각 센서
인스파이어 로봇 RH56DFX 다관절 로봇 핸드 – 6축, 12관절, 30N 그립력, RS485, 힘 & 촉각 센서
Inspire Robots
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
인스파이어 로봇 RH56DFX 다재다능 로봇 손은 서비스, 산업 및 연구 분야에서 다양한 응용을 위해 설계된 고정밀, 고성능 로봇 손입니다. 6 자유도, 12 관절, 서브 밀리미터 반복 정밀도를 갖추고 있어 인간 손의 움직임과 손재주를 밀접하게 모방합니다. 통합된 힘 및 촉각 센서는 정밀한 그립 및 핸들링을 제공하며, 견고한 설계는 무인 소매, 산업 운영 및 재활 지원과 같은 까다로운 환경에서도 신뢰성을 보장합니다.
주요 특징
-
6자유도 및 12개의 관절으로 자연스럽고 정밀한 손 움직임 제공
-
서브 밀리미터 반복성으로 고정밀 작업 수행
-
통합된 힘(6) 및 촉각(17) 센서로 반응성 그립 피드백 제공
-
실제 손 크기로 휴머노이드 로봇과의 원활한 통합 가능
-
강력한 그립력 최대 30N의 손끝 출력 및 10N의 네 손가락 그립력
-
경량 및 내구성 디자인 (구성에 따라 540g–790g)
-
RS485 통신 인터페이스와 DC 24V±10% 전원 입력
넓은 운동 범위, 포함하여 &85° 이상의 엄지 회전 및 &130°/s 이상의 엄지 각속도
기술 사양
| 매개변수 | 값 |
|---|---|
| 자유도 | 6 |
| 관절 | 12 |
| 제어 인터페이스 | RS485 |
| 작동 전압 | DC 24V ±10% |
| 정적 전류 | 0.2A |
| 최대 전류 | 2A (540g 버전) / 4A (790g 버전) |
| 무게 | 540g 또는 790±10g |
| 재현성 | ±0.20 mm (540g) / ±0.2 mm (790g) |
| 엄지 최대 그립 힘 | 15N (540g) / 30N (790g) |
| 네 손가락 최대 그립 | 10N |
| 그립 해상도 | 0.50N |
| 엄지 회전 범위 | >65° (540g) / >85° (790g) |
| 엄지 각속도 | 107°/s (측면 스윙) / >130°/s (모션) |
| 네 손가락 속도 | 260°/s (구부림) / >200°/s (모션) |
| 힘 센서 | 6 |
| 촉각 센서 | 17 |
응용 프로그램
RH56DFX는 다재다능하고 적응력이 뛰어나며, 다음과 같은 용도에 적합합니다:
-
환영 리셉션 – 공공 서비스 로봇을 위한 인간 상호작용
-
무인 소매 – 소매 솔루션을 위한 자동 그립 및 물체 처리
건축 서비스 – 시설 유지 관리에서 도구, 잠금 장치 및 장치 운영
-
가족 서비스 – 가정 기반 작업 및 돌봄 지원
-
노인 및 장애인 지원 – 높은 안전성과 정밀성을 갖춘 지원 제공
-
특수 산업 – 산업 환경에서 위험하거나 섬세한 자재 취급
하이라이트
-
인간과 유사한 손재주로 현실적이고 정밀한 상호작용
-
높은 신뢰성으로 요구가 많은 시나리오에서 지속적인 작동
-
연구, 서비스 및 산업 통합을 지원하는 쉬운 통신 프로토콜
세부사항


6자유도, 6개의 선형 구동 액추에이터, 최대 5KG의 강력한 그립, 힘 위치 제어 및 로봇 공학, 의수, 자동화 및 연구 분야에서의 다양한 응용 프로그램을 갖춘 능숙한 로봇 손.

6 DOF, 12 관절, 서브 밀리미터 반복 정밀도, 실제 크기, 힘 센서 및 다중 킬로그램 하중 용량을 갖춘 능숙한 로봇 손.
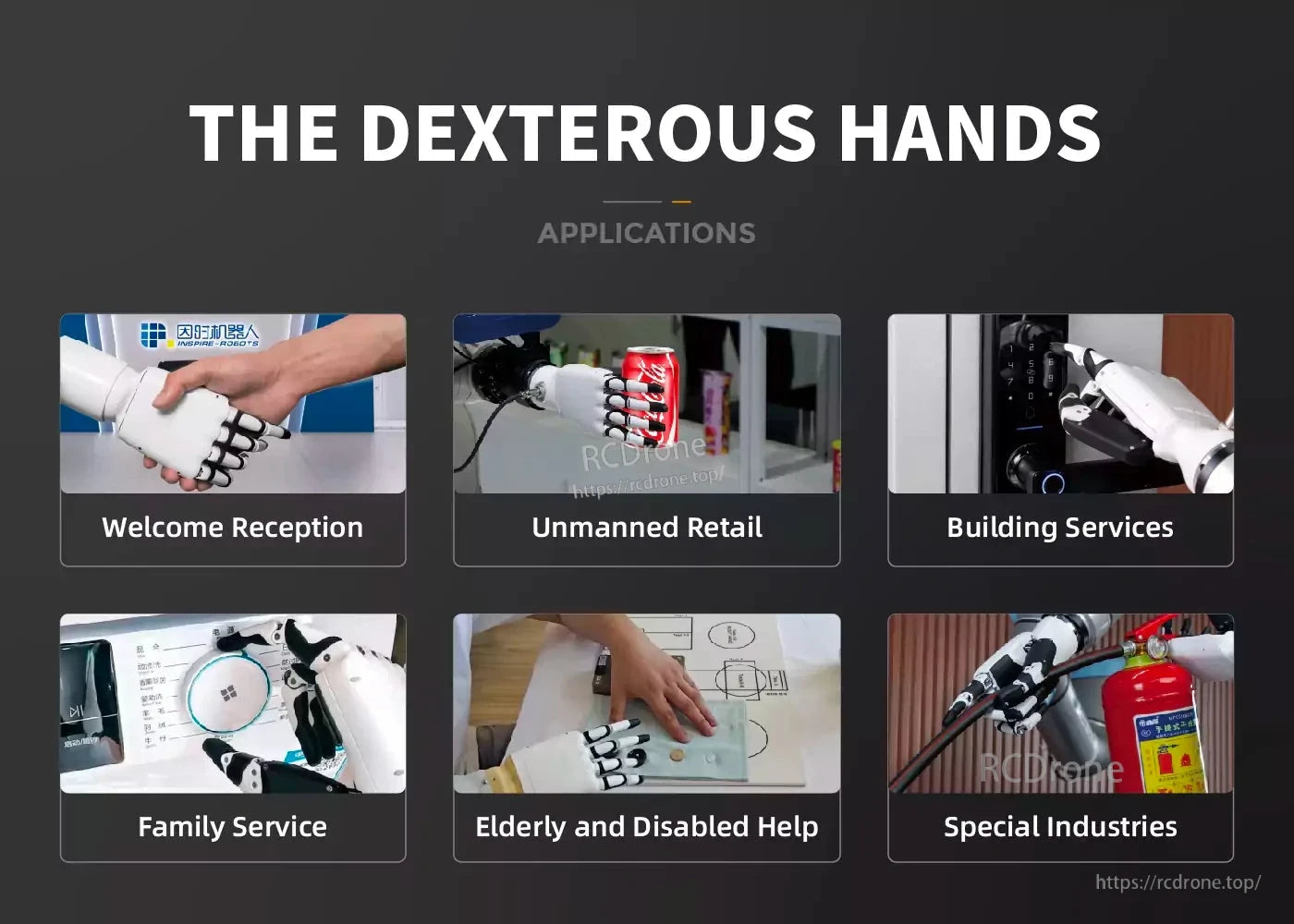
능숙한 로봇 손의 응용 분야: 접수, 소매, 건물 서비스, 가족 돌봄, 노인 지원, 특수 산업.
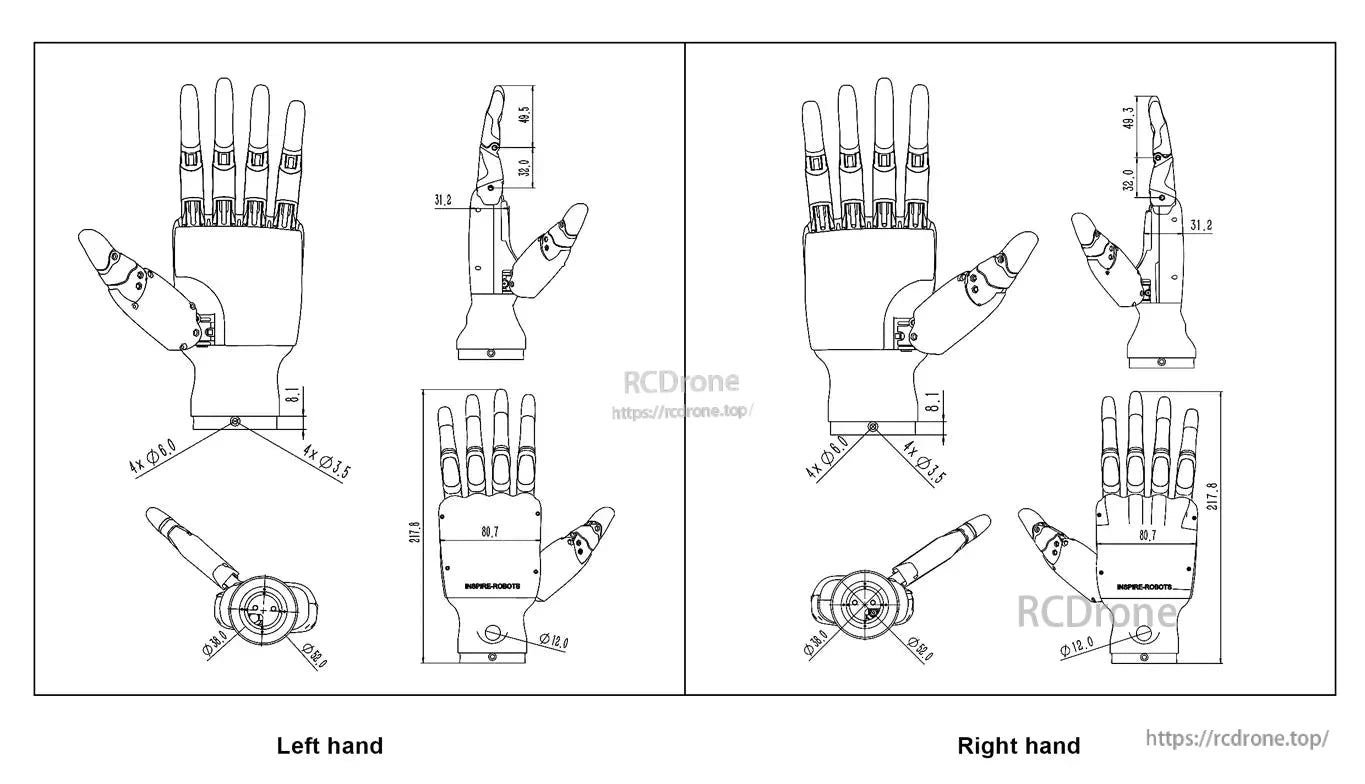
Inspire Robots RH56DFX 능숙한 로봇 손의 치수 기술 도면




