

JUXIE INTELLIGENT CE-HM-R83 시리즈, 48V 250W, 51:1/101:1/161:1, 듀얼 19비트 인코더 휴머노이드 관절용 로봇 모터
JUXIE INTELLIGENT CE-HM-R83 시리즈, 48V 250W, 51:1/101:1/161:1, 듀얼 19비트 인코더 휴머노이드 관절용 로봇 모터
JUXIE INTELLIGENT
정가
$2,559.00 USD
정가
할인가
$2,559.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
JUXIE INTELLIGENT CE-HM-R83 시리즈는 휴머노이드 및 모바일 로봇을 위한 통합 로봇 모터 및 관절 모듈입니다. 고정밀 하모닉 감속기, 프레임 없는 토크 모터, 이중 자기 인코더를 컴팩트한 R83 폼 팩터에 결합하였습니다. 세 가지 구성(51:1, 101:1, 161:1)은 15 아크초 백래시로 최대 84 Nm의 정격 토크를 제공합니다. 내장 드라이버는 50KHz 전류 루프 및 10KHz 속도 루프를 지원하는 EtherCAT/CAN을 지원합니다. 일반적인 사용에는 어깨, 팔꿈치, 무릎 및 허리 관절이 포함됩니다. 전체 치수는 R83*59mm이며 무게는 1.1kg입니다.
주요 특징
- 통합 하모닉 감속기 + 프레임 없는 토크 모터 + 고정밀 이중 자기 인코더.
- 단일 회전 절대값을 가진 이중 인코더: 회전당 19비트.
- 기어비: 51:1, 101:1, 161:1; 정격 토크 27/53/84 Nm, 피크 토크 66/120/200 Nm.
- 백래시: 구성에 따라 15 아크초.
- 전기 등급: 48 V, 250 W, 정격 속도 3000 RPM, 정격 전류 6 A, 최대 전류 16 A.
- 드라이버 인터페이스: EtherCAT/CAN; 전류 루프 50KHz; 속도 루프 10KHz.
- 컴팩트하고 경량: R83*59mm, 1.1kg; 중공 샤프트 디자인.
사양
| 매개변수 | 51:1 | 101:1 | 161:1 |
|---|---|---|---|
| 출력 속도 (RPM) | 60 | 30 | 18 |
| 정격 토크 (Nm) | 27 | 53 | 84 |
| 최대 토크 (Nm) | 66 | 120 | 200 |
| 백래시 (Arcsec) | 15 | 15 | 15 |
| 정격 전압 (V) | 48 | 48 | 48 |
| 정격 전력 (W) | 250 | 250 | 250 |
| 정격 속도 (RPM) | 3000 | 3000 | 3000 |
| 정격 전류 (A) | 6 | 6 | 6 |
| Peak Current (A) | 16 | 16 | 16 |
| 인코더 | 듀얼 인코더; 단회전 절대값: 회전당 19비트 | 듀얼 인코더; 단회전 절대값: 회전당 19비트 | 듀얼 인코더; 단회전 절대값: 회전당 19비트 |
| 드라이버 | 인터페이스: EtherCAT/CAN; 전류 루프: 50KHz; 속도 루프: 10KHz | 인터페이스: EtherCAT/CAN; 전류 루프: 50KHz; 속도 루프: 10KHz | 인터페이스: EtherCAT/CAN; 전류 루프: 50KHz; 속도 루프: 10KHz |
| 전체 치수 | R83*59mm | R83*59mm | R83*59mm |
| 전체 무게 | 1.1kg | 1.1kg | 1.1kg |
| 전형적인 응용 분야 | 어깨 관절, 팔꿈치 관절, 무릎 관절, 허리 관절. | 어깨 관절, 팔꿈치 관절, 무릎 관절, 허리 관절. | 어깨 관절, 팔꿈치 관절, 무릎 관절, 허리 관절. |
응용 분야
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
매뉴얼
세부 사항
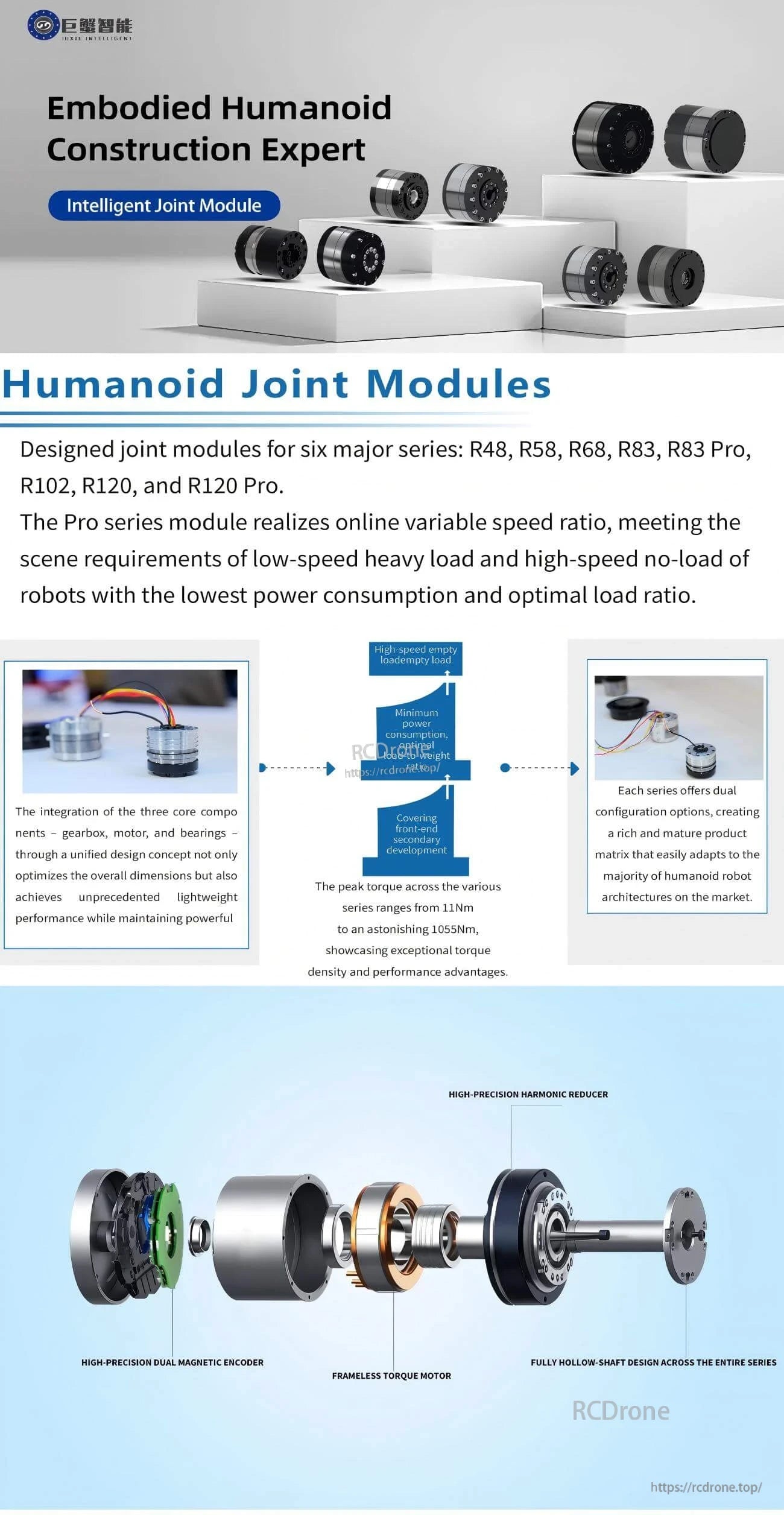
휴머노이드 로봇을 위한 지능형 관절 모듈로, 고정밀 하모닉 감속기, 이중 자기 인코더, 프레임 없는 토크 모터 및 홀로우 샤프트 디자인을 특징으로 합니다. 가변 속도, 낮은 전력 소비 및 최대 1055Nm의 피크 토크를 제공합니다.

Related Collections

