













LINKERBOT Linker Hand L10 로봇 핸드, 10자유도, CAN/RS485 제어, 웜기어 구동, 80N 그립, DC24V+/-10%
LINKERBOT Linker Hand L10 로봇 핸드, 10자유도, CAN/RS485 제어, 웜기어 구동, 80N 그립, DC24V+/-10%
LINKERBOT
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
LINKERBOT Linker Hand L10은 정교한 조작과 정밀한 제어를 위해 설계된 로봇 손입니다. 이 제품은 웜 기어 전송 장치를 갖춘 10개의 자유도를 특징으로 하며, 연구 및 산업 시스템에 신뢰성 있게 통합될 수 있도록 CAN/RS485를 통해 통신합니다.
주요 특징
- 안정적인 작동을 위한 웜 기어 전송 장치를 갖춘 10 DoF 정교한 손.
- 제어 인터페이스: CAN 및 RS485.
- 위치 반복 정확도 < +/-0.2mm; 일반적인 열기/닫기 시간 1.2s.
- 힘 능력: 최대 15N 엄지 손가락 끝 힘, 최대 15N 네 손가락 끝 힘, 최대 80N 다섯 손가락 잡기 힘.
- 제품 매뉴얼의 제어 모드 및 유틸리티: 위치 제어, 속도 제어, 손끝 센서를 통한 촉각 피드백(힘 제어), 온라인 펌웨어 업그레이드.
- 생태계 (제품별 재료): 지원되는 로봇 팔 UR, Franka, XArm, RealMan, AgileX; 지원되는 시뮬레이터 Pybullet, Isaac, MuJoCo; 사용 예시에는 ROS1, ROS2, Python, C++가 포함됩니다; 데이터 수집 방법에는 원격 조작 장갑, 외골격 장갑, 액체 금속 감지 장갑, 비전 및 VR (Meta Quest 3)이 포함됩니다.
사전 판매 또는 통합 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/를 방문하십시오.
사양
| 자유도 (DoF) | 10 |
| 관절 수 | 20 (10 활성 + 10 수동) |
| 전송 모드 | 웜 기어 전송 |
| 제어 인터페이스 | CAN/RS485 |
| 무게 | 800g |
| 최대 하중 | 25kg |
| 작동 전압 | DC24V+/-10% |
| 정적 전류 | 0.2A |
| 평균 전류 (무부하 이동) | 0.5A |
| 최대 전류 | 3A |
| 반복 위치 정확도 | < +/-0.2mm |
| 개폐 시간 | 1.2s |
| 최대 엄지 손가락 끝 힘 | 15N |
| 최대 네 손가락 끝 힘 | 15N |
| 최대 다섯 손가락 잡는 힘 | 80N |
압력 센서
| 피에조 저항 배열 | 6*12 |
| 센서 하중 지지 면적 | 9.6*14.4mm |
| 트리거 힘 | 5g |
| 측정 범위 | 20N |
| 서비스 수명 | 100,000 사이클 |
| 통신 프레임 속도 | 200FPS |
정전 용량 센서 (선택 사항)
| 샘플링 주파수 | >=50Hz |
| 측정 범위 | 0-30N |
| 과부하 한계 | 60N |
| 압력 감도 | 0.1N |
| 측정 해상도 | 0.5%FS |
| 측정 정확도 | 2%FS |
| 압력 해상도 | 0.25N |
| 방향 해상도 | 45° |
| 탐지 거리 | 1cm (금속, 인체) |
포함된 항목
- USB-to-CAN 디버깅 케이블 x1
- 커넥터 케이블 XT30 (2+2) x1
- 전원 어댑터 x1
- 전원 케이블 x1
- 링커 핸드 L10 x1
응용 분야
- ROS1/ROS2 및 시뮬레이터(Pybullet, Isaac, MuJoCo)를 사용한 능숙한 조작 연구 및 교육.
- 장갑, 외골격 장갑, 액체 금속 감지 장갑, 비전 및 VR(Meta Quest 3)을 통한 원격 조작.
- 정밀 조립, 경로 기반 작업, 나사 조임, 얇은 시트 잡기 및 일반 물체 취급.
매뉴얼
Linker_Hand_L10_Product_Manual.pdf
상세정보

Linker Hand L10은 10 DOF를 제공하며, 링크 메커니즘과 맞춤형 모터 드라이버를 통해 정밀한 움직임을 구현합니다. UR, Franka, ROS, Python, VR, Pybullet, CAN 등 다양한 로봇 통합 및 제어를 지원합니다.
Linker Hand L10은 높은 손재주를 제공하며, 각 손가락은 정밀한 작업을 위해 4개의 자유도를 제공합니다. 카메라와 전자 피부로 장착된 다중 센서 시스템은 포괄적인 환경 인식 및 적응형 상호작용을 제공합니다. 엔드 클라우드 통합을 통해 사용자는 코드 없는 기술 라이브러리 클라우드 서비스를 통해 손을 신속하게 배포할 수 있으며, 이는 효율적인 맞춤화를 가능하게 하고 운영 복잡성을 줄입니다. 이러한 기능들은 복잡한 다양한 응용 프로그램을 지원하여 정밀성과 사용 편의성을 향상시키며, 광범위한 프로그래밍이나 설정 없이도 가능합니다.

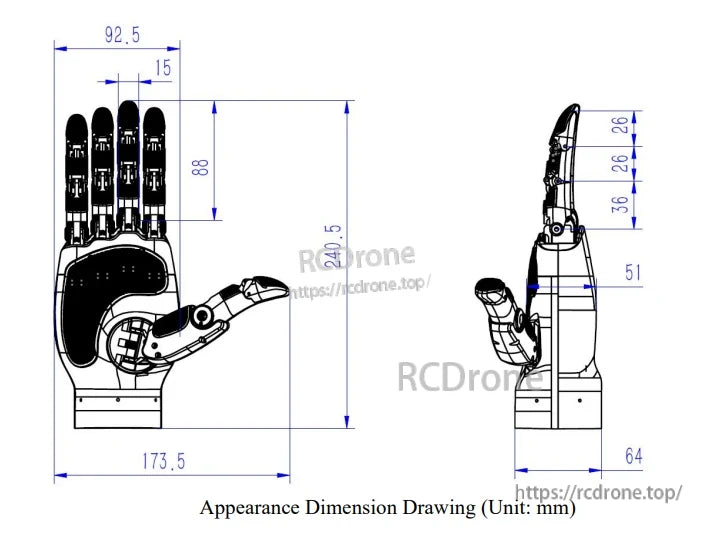
로봇 손의 치수는 밀리미터 단위로, 디자인 및 조립을 위한 정확한 측정을 포함한 정면 및 측면 뷰를 보여줍니다.
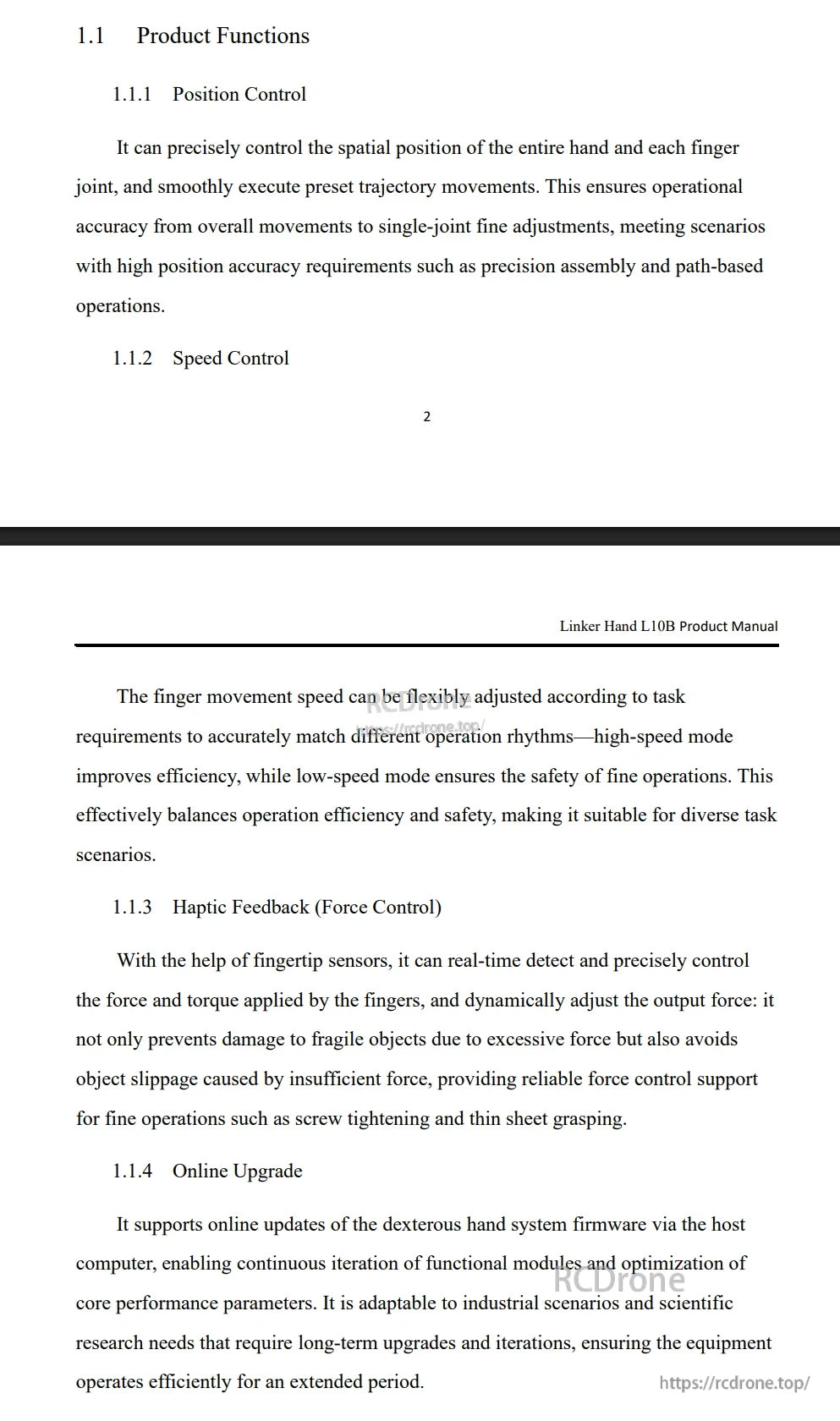
Linker Hand L10B는 정밀한 위치 및 속도 제어, 힘 관리를 위한 촉각 피드백, 온라인 펌웨어 업그레이드를 제공합니다. 정밀성, 안전성 및 적응성을 위해 설계되었으며, 미세 조작 및 장기 성능이 필요한 산업 및 연구 응용 분야에 적합합니다.
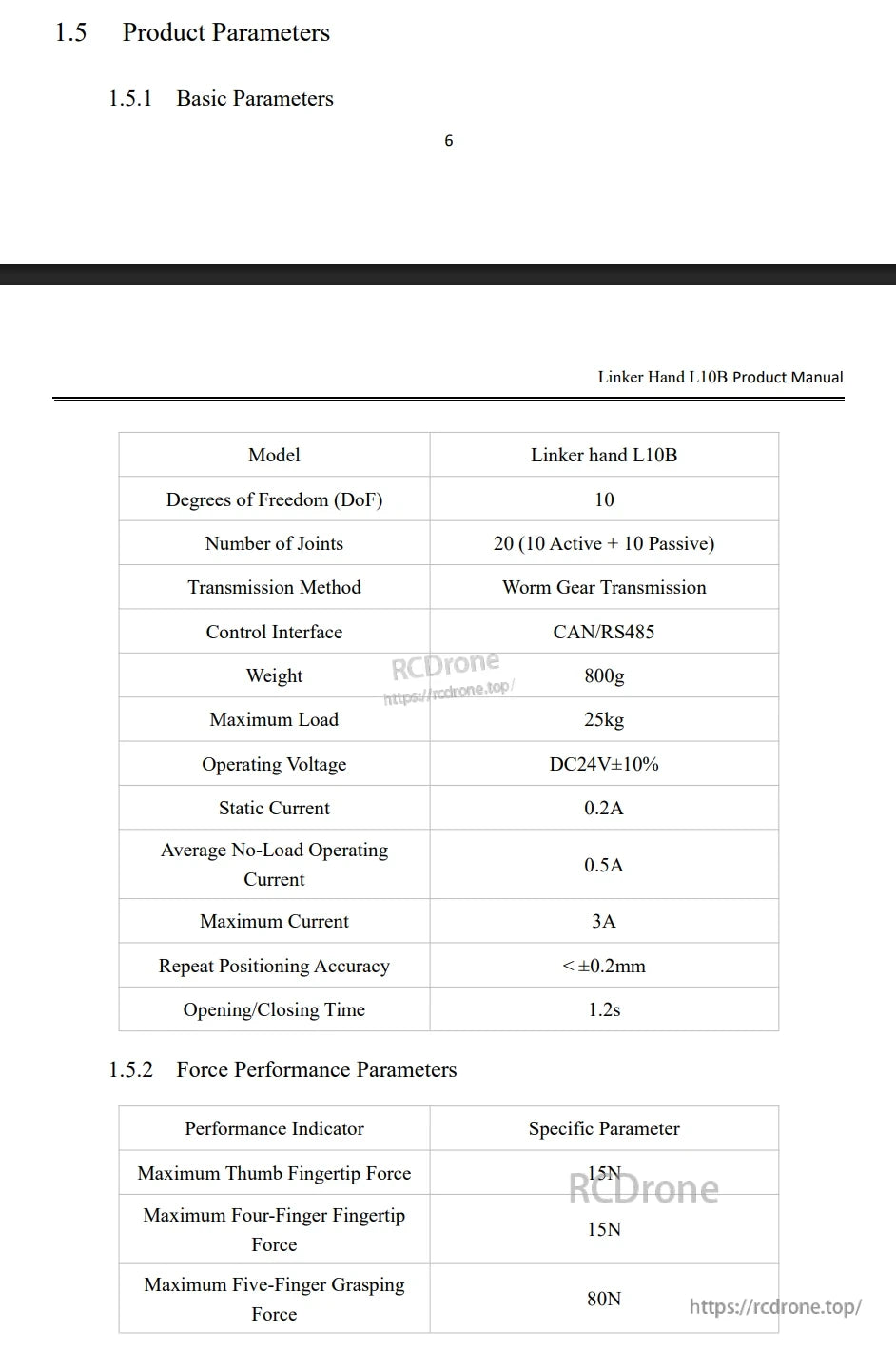
Linker Hand L10B는 10 DoF, 20개의 관절, 웜 기어 전송 및 CAN/RS485 제어를 제공합니다. 무게는 800g이며, DC24V에서 최대 25kg을 처리할 수 있으며, 최대 80N의 정밀한 위치 지정 및 잡기 힘을 제공합니다.

6x12 압전 저항 배열(20N 범위, 100k 사이클)을 특징으로 합니다. 선택적 정전 용량 센서: ≥50Hz 샘플링, 0–30N 범위, 45° 방향 해상도, 1cm에서 금속 또는 인체를 감지합니다.
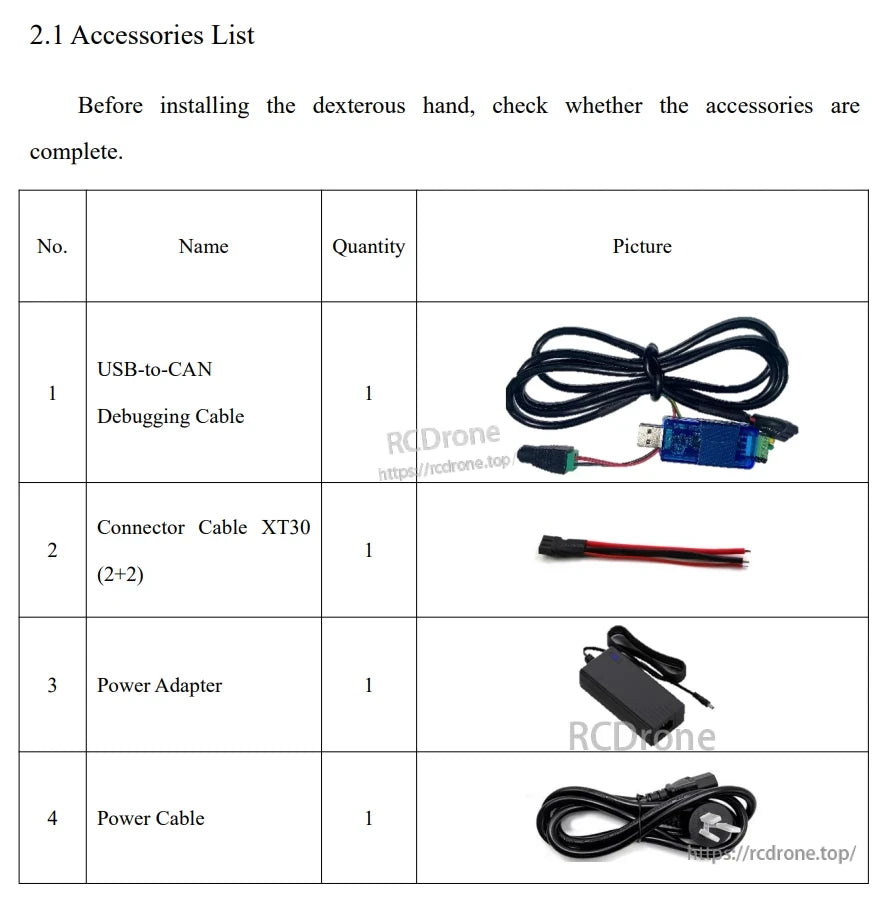
정교한 손 설치를 위한 액세서리 목록: USB-to-CAN 케이블, XT30 커넥터, 전원 어댑터, 전원 케이블, 각 1개씩.













