












LINKERBOT Linker Hand L20 로봇 핸드, 10kg 하중, 반복정밀도 ±0.2mm, CAN/RS485, DC24V, 100N 그립력, 1.2초
LINKERBOT Linker Hand L20 로봇 핸드, 10kg 하중, 반복정밀도 ±0.2mm, CAN/RS485, DC24V, 100N 그립력, 1.2초
LINKERBOT
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
LINKERBOT Linker Hand L20는 정교한 조작과 시스템 통합을 위한 다섯 손가락 로봇 손입니다. 이 제품은 정밀한 위치, 속도 및 힘 조절을 제공하기 위해 CAN/RS485 제어가 있는 링크 구동 메커니즘을 사용합니다. 이 손은 DC24V 입력을 지원하며, 연구, 프로토타입 제작 및 산업 통합을 위해 높은 반복 위치 정확도로 강력한 그립 성능을 제공합니다.
주요 특징
높은 기민성
각 손가락은 복잡하고 정밀한 작업을 위해 독립적으로 4개의 자유도를 가지고 있습니다.
위치, 속도 및 힘 제어
전체 손과 각 관절의 정확한 공간 제어; 효율성과 안전성을 위한 유연한 속도 모드; 손끝 감지가 촉각 피드백(힘 제어)을 가능하게 하여 섬세한 물체의 손상을 방지하고 미끄러짐을 피합니다.
온라인 업그레이드
상위 컴퓨터를 통한 펌웨어 업데이트를 지원하여 장기적인 반복 및 최적화를 가능하게 합니다.
다중 센서 시스템
지각 및 상호작용 능력을 향상시키기 위해 카메라와 전자 피부를 포함한 고급 다중 센서 설정이 장착되어 있습니다.
엔드 클라우드 통합
기술 라이브러리 클라우드 서비스는 코딩 없이 신속한 배포를 가능하게 하여 사용자 정의를 단순화하고 복잡성을 줄입니다.
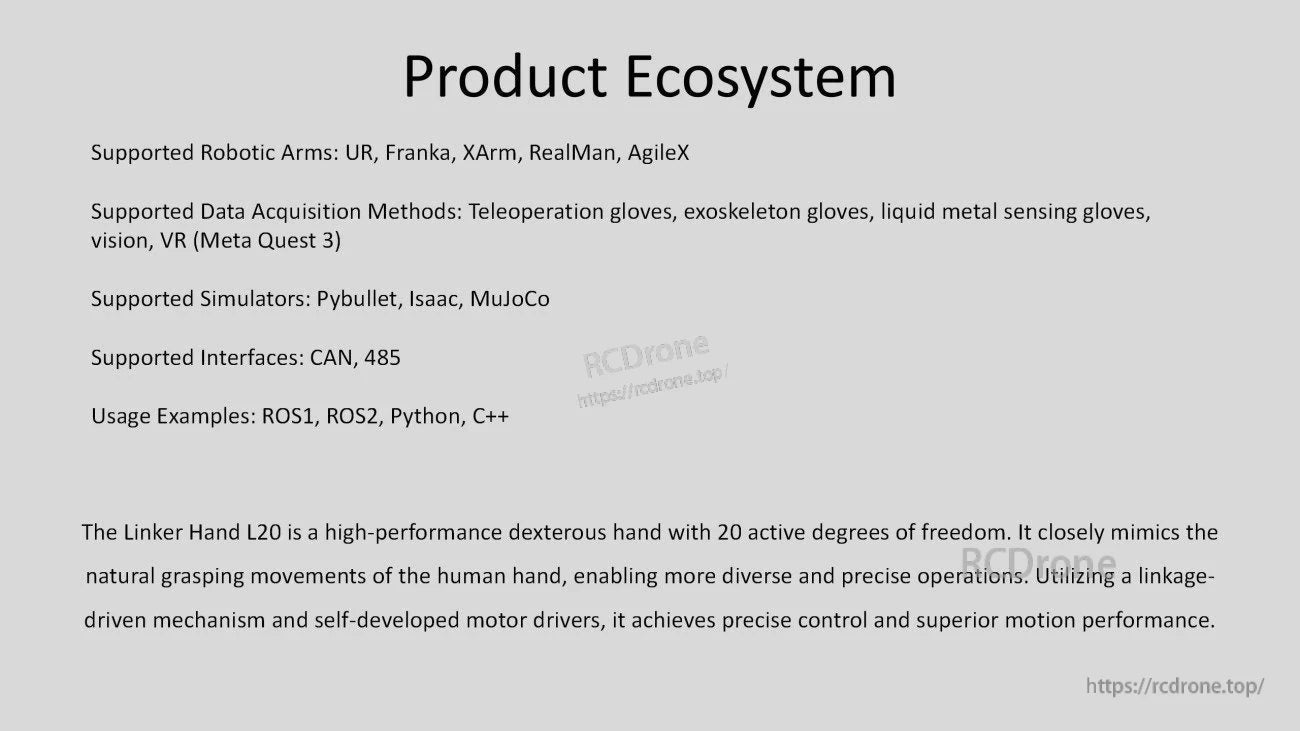
생태계 및 통합
- 지원되는 로봇 팔: UR, Franka, XArm, RealMan, AgileX
- 데이터 수집 방법: 원격 조작 장갑, 외골격 장갑, 액체 금속 감지 장갑, 비전, VR (Meta Quest 3)
- 지원되는 시뮬레이터: Pybullet, Isaac, MuJoCo
- 인터페이스: CAN, 485
- 사용 예시: ROS1, ROS2, Python, C++
사전 판매 및 기술 문의는 https://rcdrone.top/로 연락하시거나 이메일 [email protected]로 보내주십시오.
사양
| 자유도 (DoF) | 20 (활성) |
| 관절 수 | 21 (16 활성 + 5 수동) |
| 전송 모드 | 연결 로드. 구동. |
| 제어 인터페이스 | CAN/RS485 |
| 통신 속도 | 600 kHz |
| 무게 | 1100g |
| 최대 하중 | 10kg |
| 작동 전압 | DC24V +/-10% |
| 대기 전류 | 0.2A |
| 평균 전류 (무부하 이동) | 1A |
| 최대 전류 | 3A |
| 재위치 정확도 | +/-0.2mm |
| 개폐 시간 | 1.2s |
| 엄지의 최대 팁 힘 | 18N |
| 네 손가락의 최대 팁 힘 | 20N |
| 다섯 손가락의 최대 그립 힘 | 100N |
| 치수 | 전체 높이 263.50 mm; 전체 너비 180.80 mm; 손가락 블록 너비 99.50 mm; 두께 45.50 mm |
응용 분야
- 원격 조작 및 기술 학습
- 터치스크린 상호작용 및 장치 조작
- 작고 얇거나 불규칙한 물체의 정밀 그립
- 도구 취급 및 조작 작업
- Pybullet, Isaac 또는 MuJoCo를 이용한 로봇 연구 및 시뮬레이션
매뉴얼
Linker_Hand_L20_Product_Manual.pdf
세부 사항

Linker Hand L20은 20 DOF를 제공하며, 인간의 그립을 모방합니다.UR, Franka, XArm, RealMan, AgileX 팔을 지원합니다; 원격 조작, 외골격, VR 감지; Pybullet, Isaac 시뮬레이터; CAN, 485 인터페이스; ROS1/2, Python, C++ 사용.

링커 핸드 L20은 높은 손재주를 제공하며, 각 손가락은 복잡한 작업을 위해 네 개의 자유도를 제공합니다. 카메라와 전자 피부를 포함한 다중 센서 시스템을 갖추고 있어 다양한 응용 프로그램에서 정밀한 환경 인식 및 상호작용을 달성합니다. 엔드 클라우드 통합을 통해 기술 라이브러리 클라우드 서비스를 통해 신속하고 코드 없는 배포가 가능하여 효율적인 맞춤화와 운영 복잡성 감소를 실현합니다. 고급 기계, 정교한 감지 및 지능형 소프트웨어를 결합하여 이 손은 다양한 실제 요구에 맞춘 적응 가능하고 정밀한 로봇 성능을 제공합니다. 프로그래밍 전문 지식이나 광범위한 설정 없이도 가능합니다.

링커 핸드 L20은 정밀한 위치/속도 제어, 힘 관리를 위한 실시간 햅틱 피드백을 제공하며, 진화하는 산업 및 연구 요구에 적응하기 위해 온라인 펌웨어 업그레이드를 지원하여 장기적인 효율성을 보장합니다.













