







LINKERBOT 링크 핸드 L6 로봇 핸드, 6자유도, CAN, 링크 구동, 50N 그립력, ±0.2mm 반복정밀도
LINKERBOT 링크 핸드 L6 로봇 핸드, 6자유도, CAN, 링크 구동, 50N 그립력, ±0.2mm 반복정밀도
LINKERBOT
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
LINKERBOT Linker Hand L6는 정밀 조작을 위해 설계된 능숙한 로봇 손입니다. 6 자유도(DoF)와 11개의 관절(6개 능동 + 5개 수동)을 갖추고 있으며, 링크 전송 및 CAN 제어 인터페이스를 특징으로 합니다. 제품 이미지에 표시된 구조는 전금속 손가락, 손끝에 내구성이 뛰어난 실리콘, 다섯 개의 손가락 촉각 압력 센서, 표시등, 핀치 방지 반손바닥 고무 패드, 고정밀 전기 실린더 직접 구동을 강조합니다.
주요 특징
- 6 DoF 능숙한 조작; 11개의 관절(6개 능동 + 5개 수동).
- CAN 버스 제어가 있는 링크 전송.
- 반복 위치 정확도: ±0.2mm.
- 힘 능력: 엄지의 최대 팁 힘 10N; 네 손가락의 최대 팁 힘 8N; 최대 다섯 손가락 잡기 힘 50N.
- 접촉/압력 측정을 위한 압전 저항식 다섯 손가락 촉각 센서 배열.
- 디자인 요소: 전금속 손가락, 내마모성 실리콘 팁, 표시등, 핀치 방지 고무 패드.
- 컴팩트 & 및 민첩한 레이아웃; 제품 이미지에 묘사된 다중 센서 시스템(카메라 및 전자 피부 포함) 및 장치-클라우드 통합.
판매 및 기술 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/를 방문하십시오.
사양
| 매개변수 | 값 |
|---|---|
| 자유도 (DoF) | 6 |
| 관절 수 | 11 (6 활성 + 5 비활성) |
| 전송 모드 | 링크 전송 |
| 제어 인터페이스 | CAN |
| 무게 | 623.5g |
| 최대 하중 | 28kg |
| 작동 전압 | DC24V±10% |
| 정적 전류 | 0.2A |
| 평균 전류 (무부하 이동) | 0.75A |
| 최대 전류 | 1.4A |
| 반복 위치 정확도 | ±0.2mm |
| 엄지의 최대 팁 힘 | 10N |
| 네 손가락의 최대 팁 힘 | 8N |
| 다섯 손가락의 최대 잡는 힘 | 50N |
모션 성능
| 움직임 부위 | 각도 범위 (°) | 움직임 속도 (°/s) |
|---|---|---|
| 엄지의 기부 | 57 | 152.82 |
| 검지의 기부 | 72.30 | 213.27 |
| 중지의 기부 | 72.90 | 208.29 |
| 약지의 기부 | 73.10 | 202.49 |
| 새끼손가락의 기부 | 72.60 | 201.11 |
| 엄지의 팁 | 69.90 | 192.84 |
| 검지 손가락 끝 | 64.60 | 192.84 |
| 중지 손가락 끝 | 65.10 | 185.32 |
| 약지 손가락 끝 | 66.90 | 185.32 |
| 새끼 손가락 끝 | 66.70 | 184.76 |
| 엄지 손가락 측면 스윙 | 80 | 235.29 |
| 개방 및 폐쇄 시간 | - | 0.35s |
센서
| 파라미터 | 사양 |
|---|---|
| 피에조 저항 배열 | 6*12 |
| 센서 하중 지지 면적 | 9.6*14.4mm |
| 트리거 힘 | 5g |
| 측정 범위 | 20N |
| 서비스 수명 | 100,000 사이클 |
| 통신 프레임 속도 | 200FPS |
| 값 범위 | 0~4095 |
외관 치수
| 정의 | 매개변수 (mm) |
|---|---|
| 중지 끝에서 손바닥 바닥까지의 길이 | 190.7 |
| 최대 손바닥 너비 | 121 |
| 엄지 끝에서 손바닥 바닥까지의 길이 | 134.3 |
| 손목 높이 | 9.5 |
| 손목 지름 | 60 |
포함된 항목
- USB‑to‑CAN 디버깅 케이블 x1
- 커넥터 케이블 XT30 (2+2) x1
- 전원 어댑터 x1
- 전원 케이블 x1
- 링커 핸드 L6 x1
응용 프로그램
- 정밀 그립 및 물체 처리
- 도구 그립 및 조작
- 부품 픽 앤 플레이스 작업
매뉴얼
세부정보


6자유도 고성능 다재다능 로봇 손. 컴팩트한 민첩성, 다중 센서 시스템, 정밀 제어, 환경 적응 및 클라우드 기술 라이브러리를 통한 코드 없는 사용자 정의를 위한 장치-클라우드 통합 기능을 갖추고 있습니다.



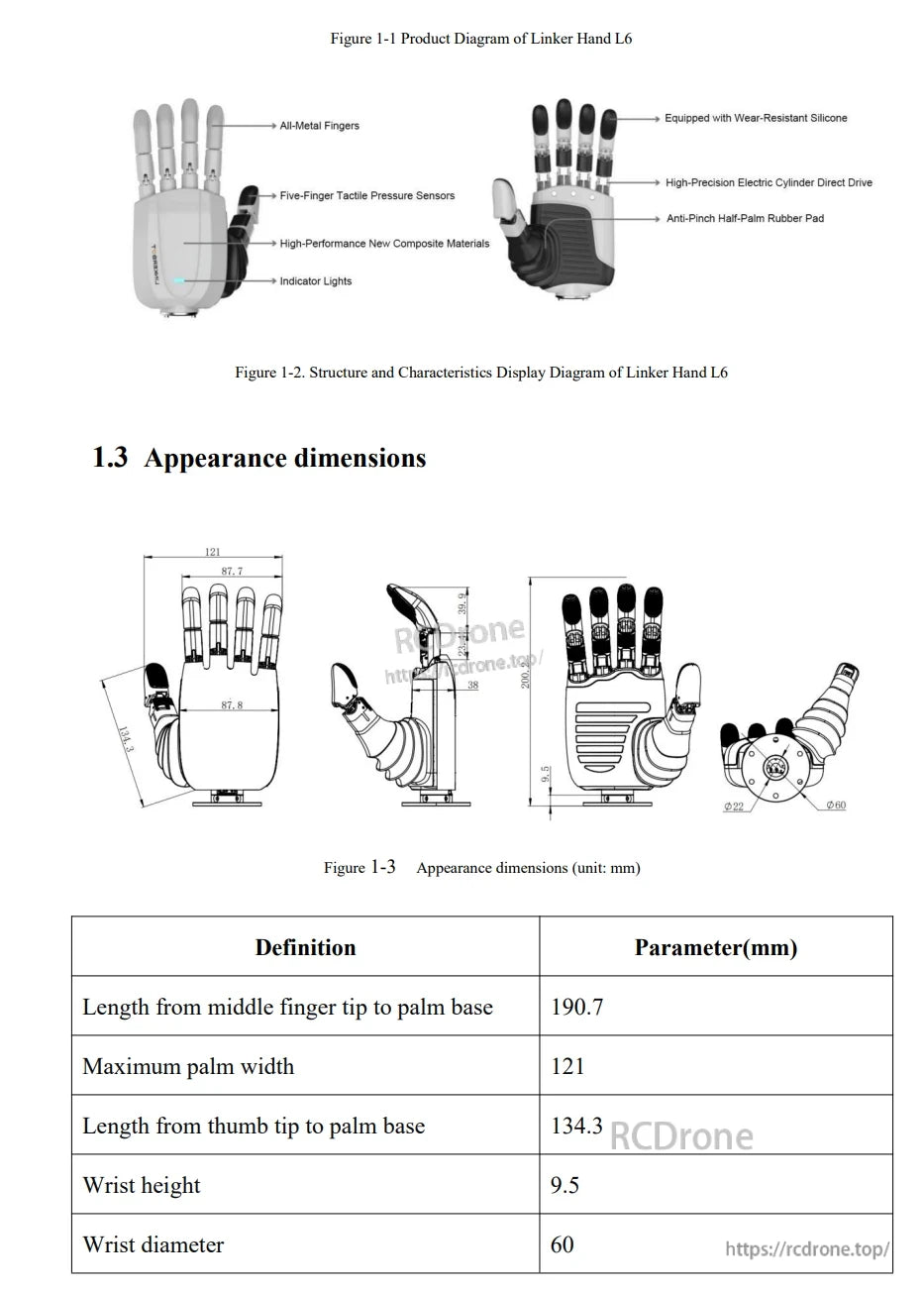
Linker Hand L6는 전금속 손가락, 촉각 센서, 내마모 실리콘, 전기 실린더 구동 및 방지 고무 패드를 갖추고 있습니다. 손가락 길이: 190.7mm; 손바닥 너비: 121mm; 손목 지름: 60mm.
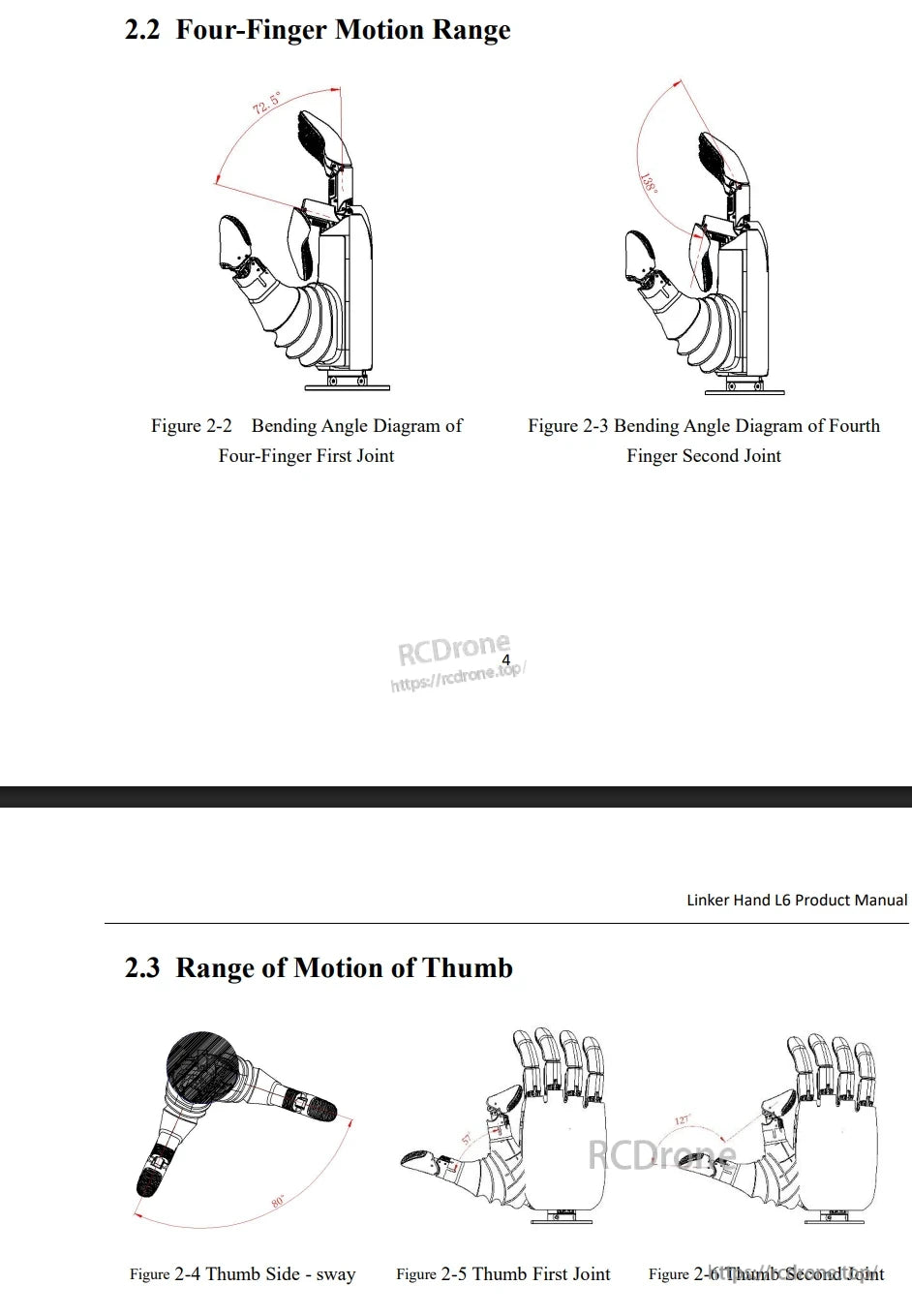
손가락 및 엄지 관절의 움직임 범위: 네 손가락 첫 번째 관절 72.5°, 두 번째 관절 138°; 엄지 측면 흔들림 80°, 첫 번째 관절 57°, 두 번째 관절 127°.
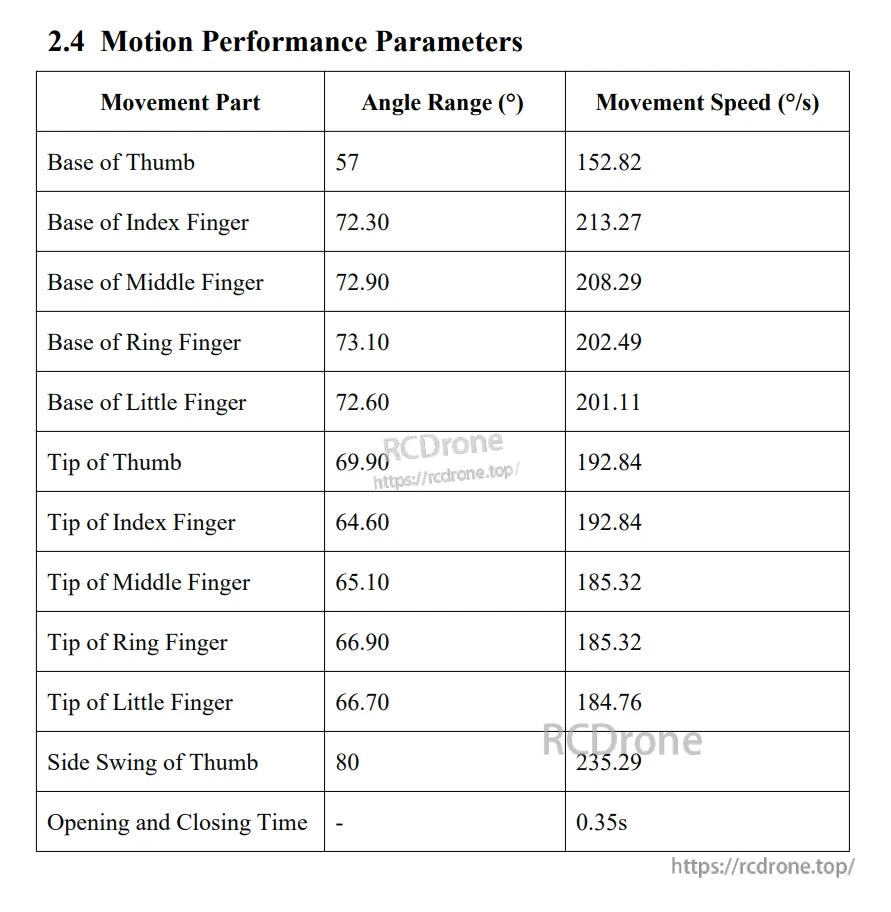
로봇 손가락 움직임 매개변수: 엄지 스윙 235.29°/s, 열림/닫힘 0.35초—정확한 관절 각도 범위와 속도를 보여줍니다.
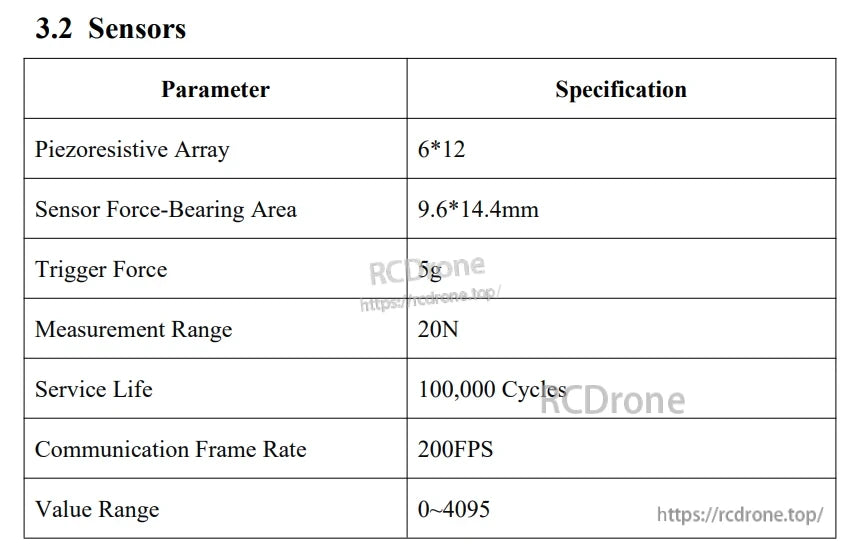
센서 사양: 6x12 배열, 9.6x14.4mm 면적, 5g 트리거, 20N 범위, 100k 사이클, 200FPS, 0-4095 값 범위.
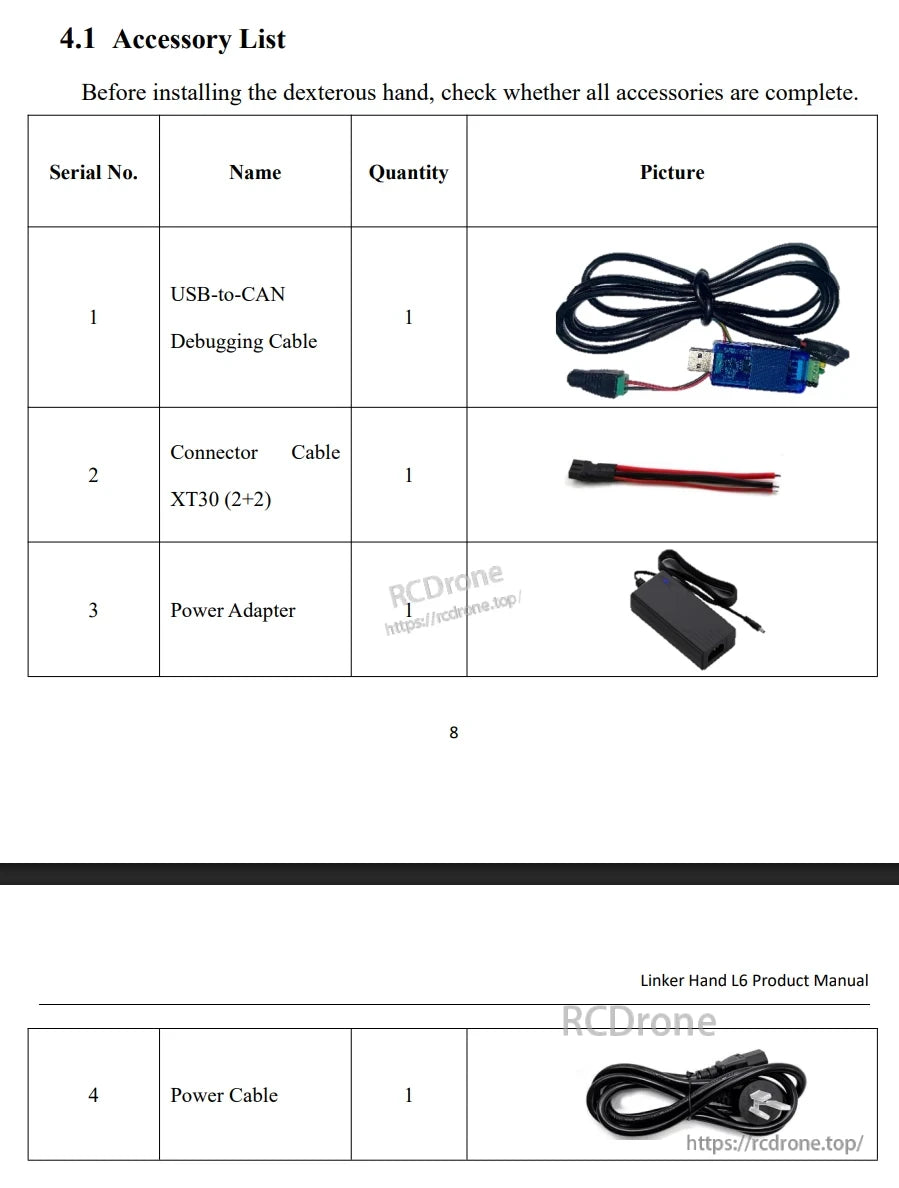
Linker Hand L6의 액세서리 목록: USB-to-CAN 케이블, XT30 커넥터, 전원 어댑터 및 전원 케이블. 설치 전에 완전성을 확인하십시오.
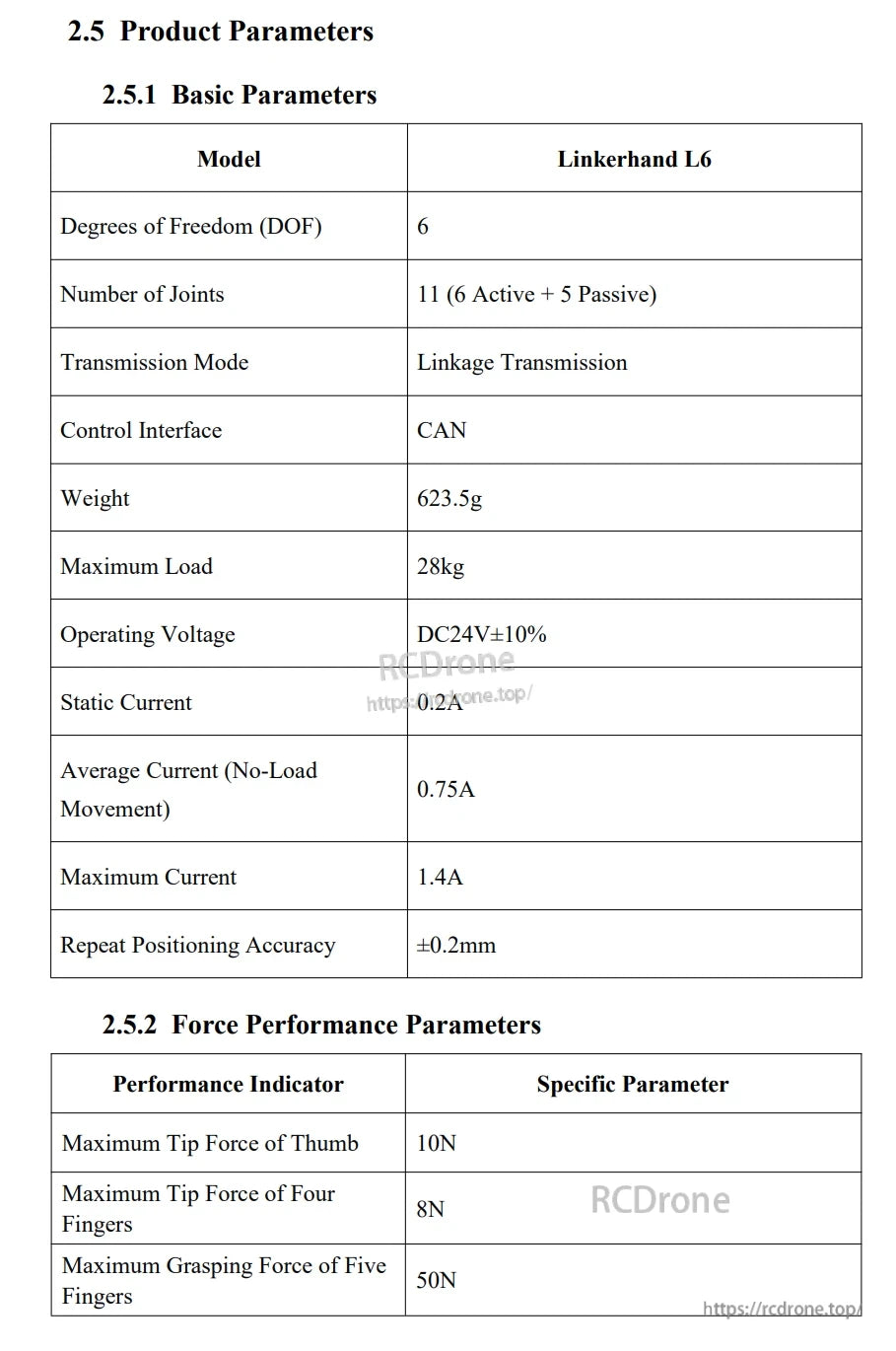
링커핸드 L6 로봇 손은 6 자유도, 11 개의 관절, CAN 제어, 무게 623.5g, 최대 하중 28kg을 처리하며, DC24V±10%로 작동하고, ±0.2mm의 정밀도를 제공하며, 최대 50N의 잡는 힘을 제공합니다.







