







LINKERBOT Linker Hand O6 로봇 핸드, 6자유도, 11관절, CAN/RS485, 130N 그립력, ±0.2mm 정밀도, DC24V±10%
LINKERBOT Linker Hand O6 로봇 핸드, 6자유도, 11관절, CAN/RS485, 130N 그립력, ±0.2mm 정밀도, DC24V±10%
LINKERBOT
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
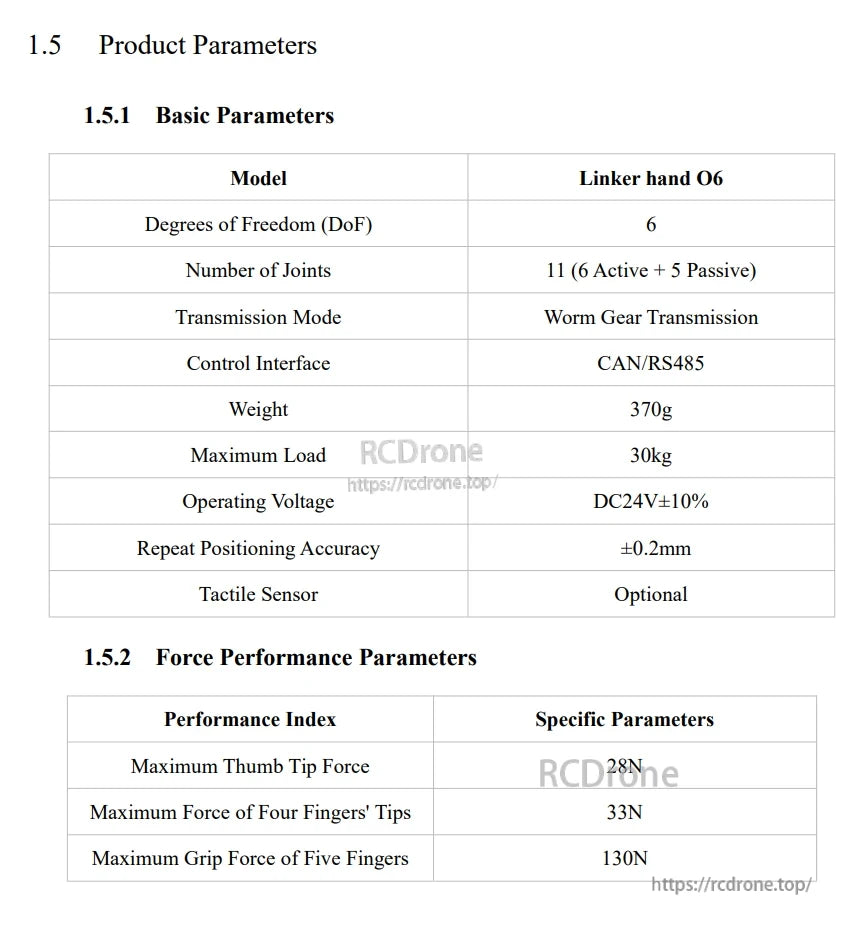
LINKERBOT Linker Hand O6는 컴팩트한 통합과 정밀한 조작을 위해 설계된 로봇 손입니다. 6개의 자유도를 제공하며 11개의 관절(6개 능동 + 5개 수동)을 갖추고 있으며, 안정적인 작동을 위한 웜 기어 전송, CAN/RS485 제어 및 선택적 촉각 감지를 지원합니다. 이 손의 능숙한 구조는 DC24V±10% 작동 전압에서 ±0.2mm 반복 위치 정확도로 최대 130N의 다섯 손가락 그립 힘을 제공합니다. 경량 370g 구조와 작은 면적은 물류 처리, 산업 조립 및 불규칙한 형태의 잡기 시나리오를 지원합니다.
주요 특징
컴팩트 &및 민첩한
컴팩트한 구조 설계는 장비 하중을 줄이면서 좁은 공간에서 정밀한 잡기를 위한 유연성을 향상시킵니다.
높은 내구성
경량 강도와 마모 저항성을 위해 알루미늄 합금으로 제작되어 장기적인 안정적인 성능을 지원합니다.
장치-클라우드 통합
장치-클라우드 통합은 간소화된 운영 및 사용자 정의가 가능한 클라우드 기반 기술 라이브러리를 통해 신속한 배포를 가능하게 합니다.
사양
| 모델 | LINKERBOT 링크 핸드 O6 |
| 자유도 (DoF) | 6 |
| 관절 수 | 11 (6 활성 + 5 수동) |
| 전송 모드 | 웜 기어 전송 |
| 제어 인터페이스 | CAN/RS485 |
| 무게 | 370g |
| 최대 하중 | 30kg |
| 작동 전압 | DC24V±10% |
| 반복 위치 정확도 | ±0.2mm |
| 촉각 센서 | 선택 사항 |
| 최대 엄지 손가락 힘 | 28N |
| 네 손가락 끝의 최대 힘 | 33N |
| 다섯 손가락의 최대 그립 힘 | 130N |
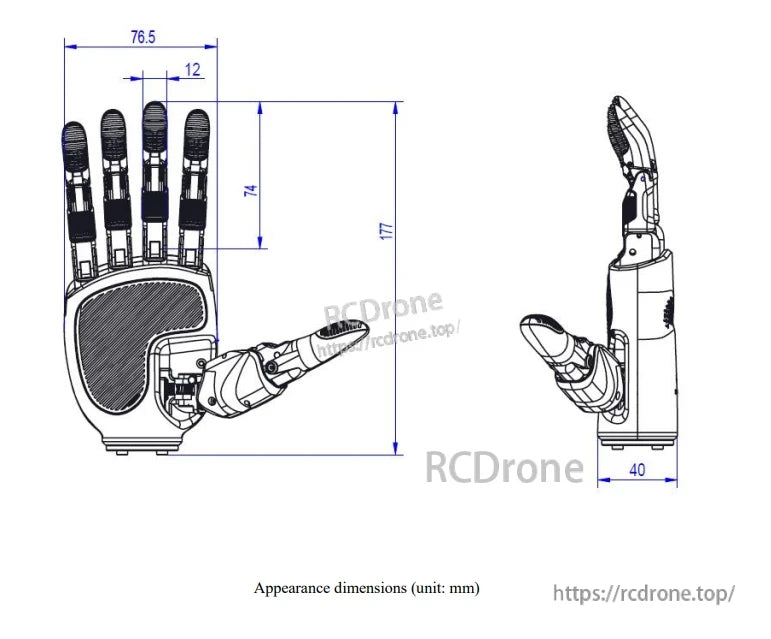
| 치수 (외관) | 높이 177mm; 너비 76.5mm; 두께 40mm |
운동 범위
| LF2, RF2, MF2, FF2 (구부리기) | 90° |
| LF1, RF1, MF1, FF1 (구부리기) | 80° |
| THUMB1 (구부리기) | 55° |
| THUMB2 (구부리기) | 30° |
| THUMB3 (측면 - 흔들기) | 88° |
포함된 항목
- USB-to-CAN 디버깅 케이블 ×1
- 커넥터 케이블 XT30 (2+2) ×1
- 전원 어댑터 ×1
- 전원 케이블 ×1
- 링커 핸드 O6 x1
판매 또는 기술 지원을 원하시면 [email protected] or에 문의하시거나 https://rcdrone.top/를 방문하십시오.
응용 프로그램
- 물류 처리 및 자재 이동
- 산업 조립 및 도구 조작
- 불규칙한 형태와 소비자 제품의 안정적인 잡기
매뉴얼
Linker_Hand_O6_Product_Manual.pdf
세부사항

Linker Hand O6는 정밀하고 강력한 그립을 위해 6개의 능동 관절과 5개의 수동 관절을 제공합니다. 컴팩트하고 내구성이 뛰어난 알루미늄 디자인은 물류, 조립 및 불규칙한 잡기에 적합합니다. 코딩 없이 쉽게 AI 훈련을 위한 클라우드 통합 기능이 있습니다.


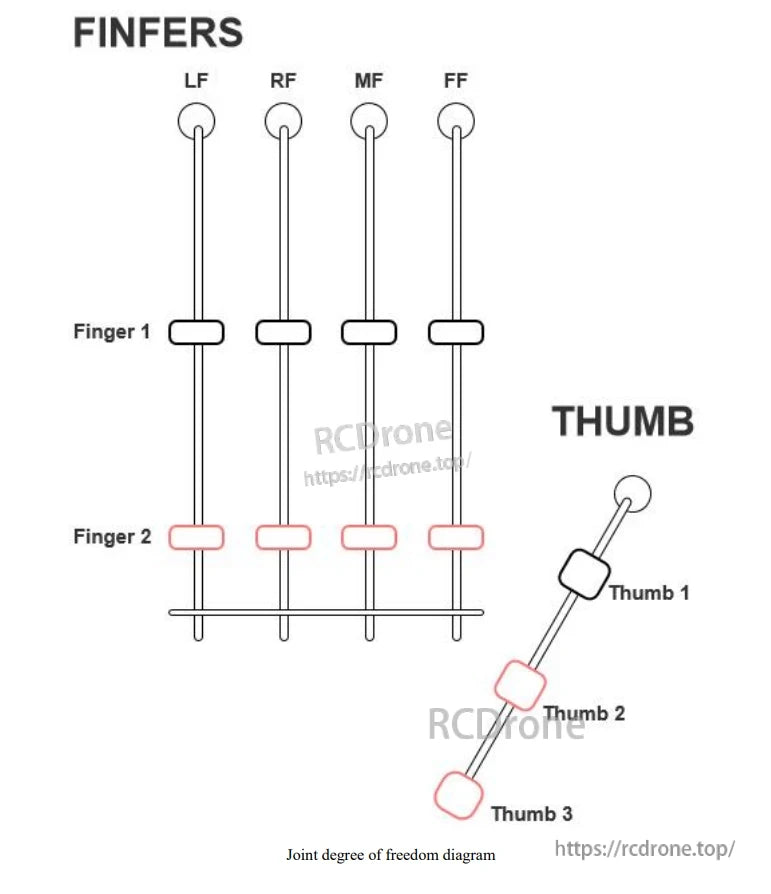
손가락 및 엄지 관절 자유도 다이어그램
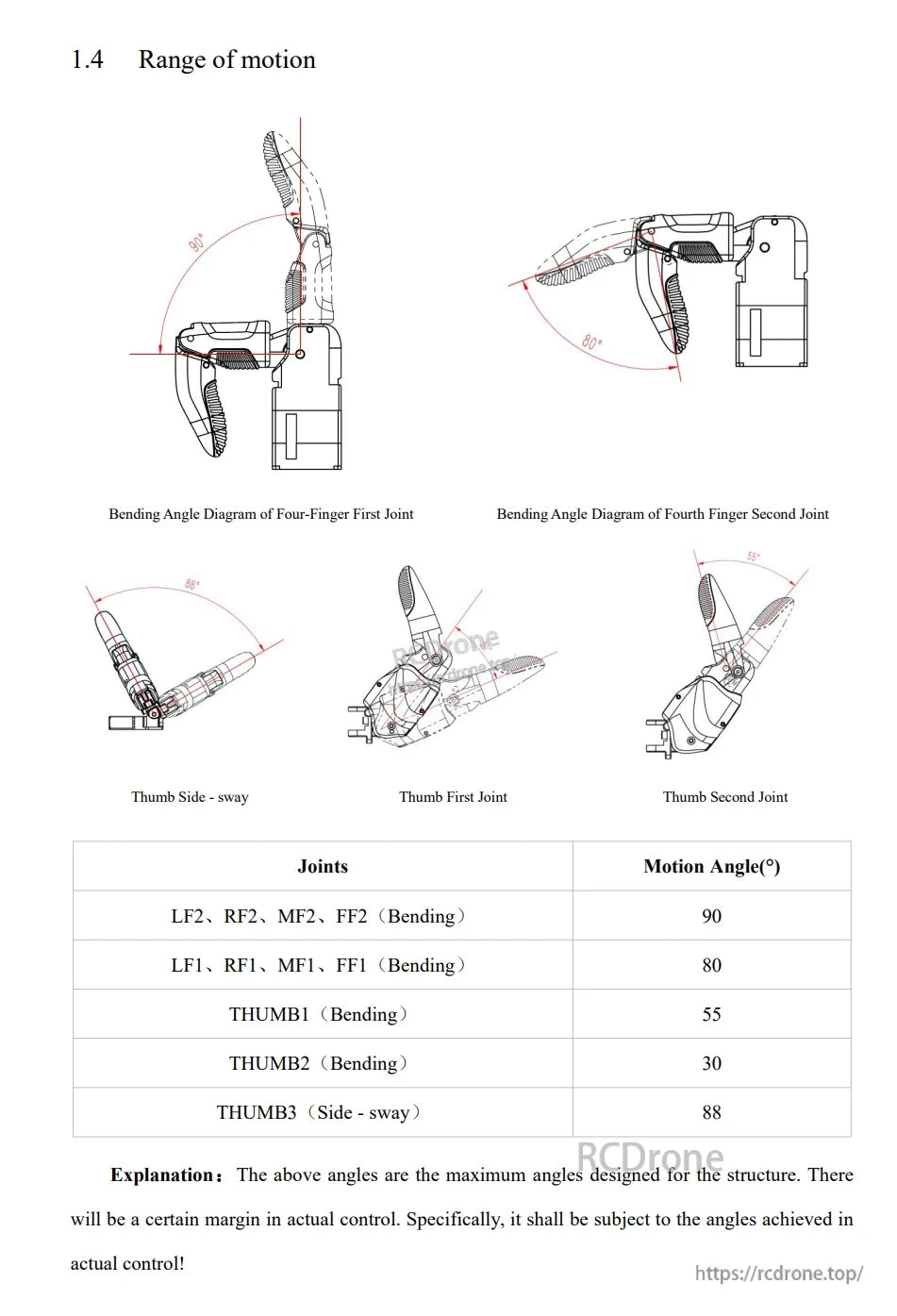
손가락은 80–90°로 구부러지고, 엄지는 30–55°로 구부러지며, 측면 흔들림은 88°에 도달합니다. 이는 설계된 최대 각도이며, 실제 제어는 약간 다를 수 있습니다.
링커 핸드 O6 로봇 핸드는 6 자유도, 11 관절, 웜 기어 전송, CAN/RS485 제어를 갖추고 있으며, 무게는 370g, 최대 하중은 30kg, DC24V±10%에서 작동하고, ±0.2mm의 정확도를 제공하며, 지정된 힘 성능을 갖춘 선택적 촉각 센서를 제공합니다.

정교한 손 설치를 위한 액세서리 목록: USB-to-CAN 케이블, XT30 커넥터, 전원 어댑터, 전원 케이블 - 모두 수량 1개입니다.







