




LKMTECH MG4010E-i36B-V3 모터 24V 1:36 유성 기어 모터(브레이크 포함), RS485/CAN, 자기 인코더
LKMTECH MG4010E-i36B-V3 모터 24V 1:36 유성 기어 모터(브레이크 포함), RS485/CAN, 자기 인코더
LKMTECH
정가
$467.00 USD
정가
할인가
$467.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
LKMTECH MG4010E-i36B-V3 모터는 행성 기어 모터로, 통합 브레이크 및 인코더 피드백이 장착되어 있으며, 정밀한 토크/속도/위치 제어와 컴팩트한 통합이 필요한 로봇 작동을 위해 설계되었습니다. RS485 또는 CAN 통신을 지원하며, PG4210 감속기(1:36) 및 이중 자기 인코더(18비트 모터 + 14비트 감속기)로 사양이 지정되어 있습니다.
주요 특징
- 행성 감속기: PG4210, 감속비 1:36, 백래시 ≤12 아크분
- 인코더: 18비트(모터) + 14비트(감속기) 자기 인코더
- 통신: RS485 또는 CAN
- 제어 루프: 토크 루프 (32KHz) / 속도 루프 (8KHz) / 위치 루프 (4KHz)
- 가속 곡선: 사다리꼴 가속
- 브레이크: BG4906, 브레이크 토크 0.6N.
- 모터 온도: 예
기술 사양
| 품명 | MG4010E-i36B-V3 |
| 정격 전압 | 24V |
| 최대 속도 | 90RPM |
| 정격 속도 | 77RPM |
| 정격 토크 | 6N.m |
| 최대 토크 | 13N.m |
| 정격 전류 | 2.4A |
| 최대 전력 | 132W |
| 속도 상수 | 3rpm/V |
| 토크 상수 | 2.58N.m/A |
| 회전수 | 14 |
| 권선 유형 | Y |
| 상 저항 | 0.68Ω |
| 상 인덕턴스 | 0.25mH |
| 모터 폴 | 28 |
| 로터 관성 | 158gcm² |
| 모터 온도 | 예 |
| 감속기 유형 | PG4210 |
| 감속비 | 1:36 |
| 백래시 | ≤12 아크분 |
| 베어링 정격 하중 | 1120N |
| 모터 무게 | 542.5g |
| 브레이크 유형 | BG4906 |
| 브레이크 토크 (N.m) | 0.6N.m |
| 시작 전압 (V) | 24V |
| 유지 전압 (V) | 7V |
| 유지 전력 (W) | 1.4W |
| 추천 드라이브 | DG40E |
| 드라이브 입력 전압 | 7.4-32V |
| 통신 | RS485 또는 CAN |
| 통신 주파수 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| 인코더 | 18비트(모터)+14비트(감속기) 자기 인코더 |
| 인코더 전송 속도 (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| 전송 속도 (CAN) | 100K, 125K, 250K, 500K, 1M |
| 제어 모드 | 토크 루프(32KHz)/속도 루프(8KHz)/위치 루프(4KHz) |
| 가속 곡선 | 사다리꼴 가속 |
인터페이스 정의 (포트)
이 모터 시리즈의 포트 의미:
- A/H: RS485-A 또는 CAN-H
- B/L: RS485-B 또는 CAN-L
- V-: 음전원
- V+: 양전원
- T: UART 송신기
- R: UART 수신기
- G: 신호 GND
- ID 스위치
응용 프로그램
- 휴머노이드 로봇
- 로봇 팔
- 외골격
- 사족 로봇
- AGV 차량
- ARU 로봇
매뉴얼 / 문서
통합 지원 및 사전 판매 호환성 검사를 원하시면 [email protected] or에 문의하시고 https://rcdrone.top/. 를 방문하십시오.
세부정보

컴팩트한 행성 기어모터 본체는 브레이크와 온보드 인터페이스를 단일 액추에이터 패키지에 통합합니다.
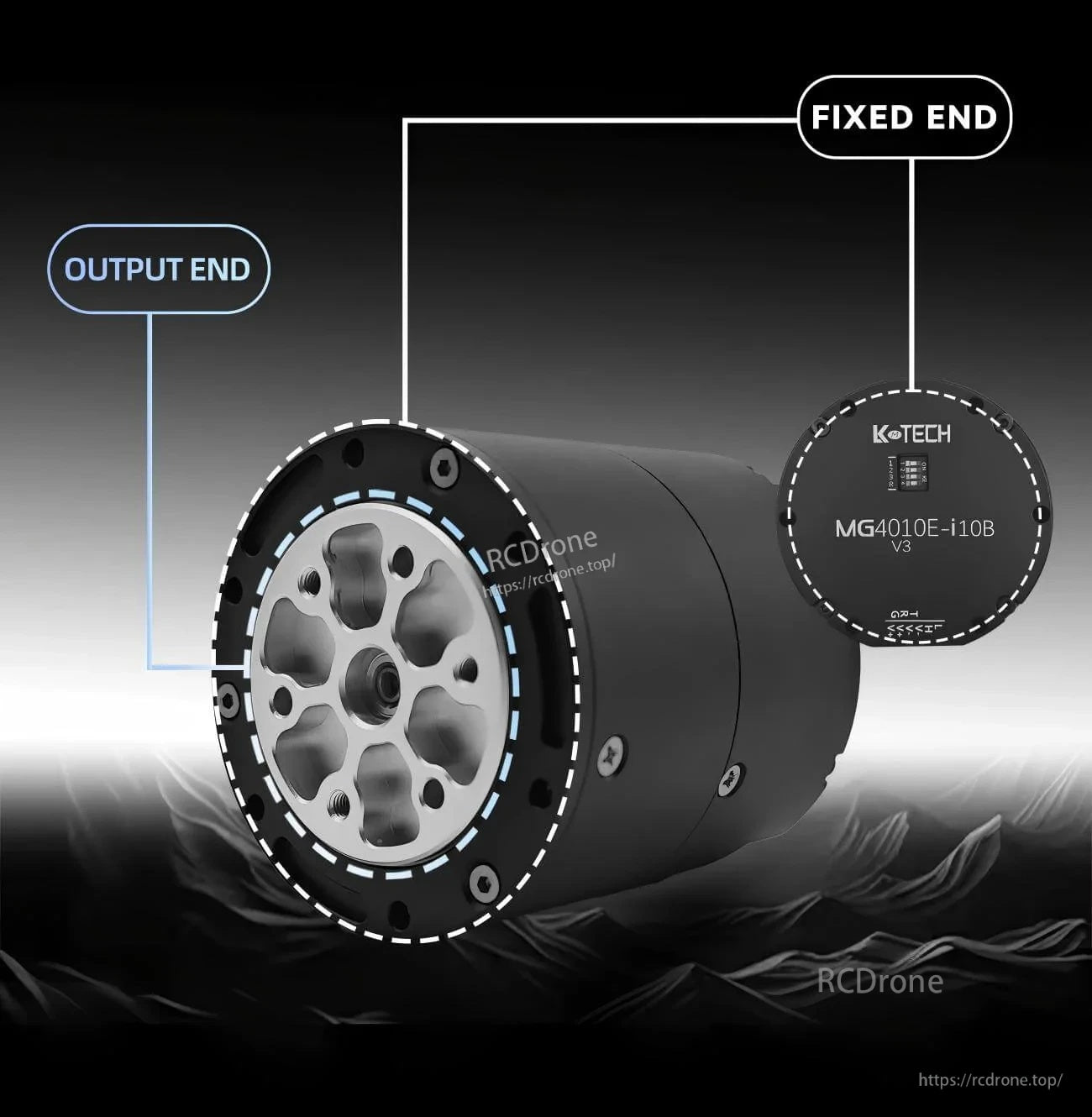
명확하게 정의된 출력 끝과 고정 끝은 조립에서 기계적 통합 및 정렬을 단순화하는 데 도움을 줍니다.

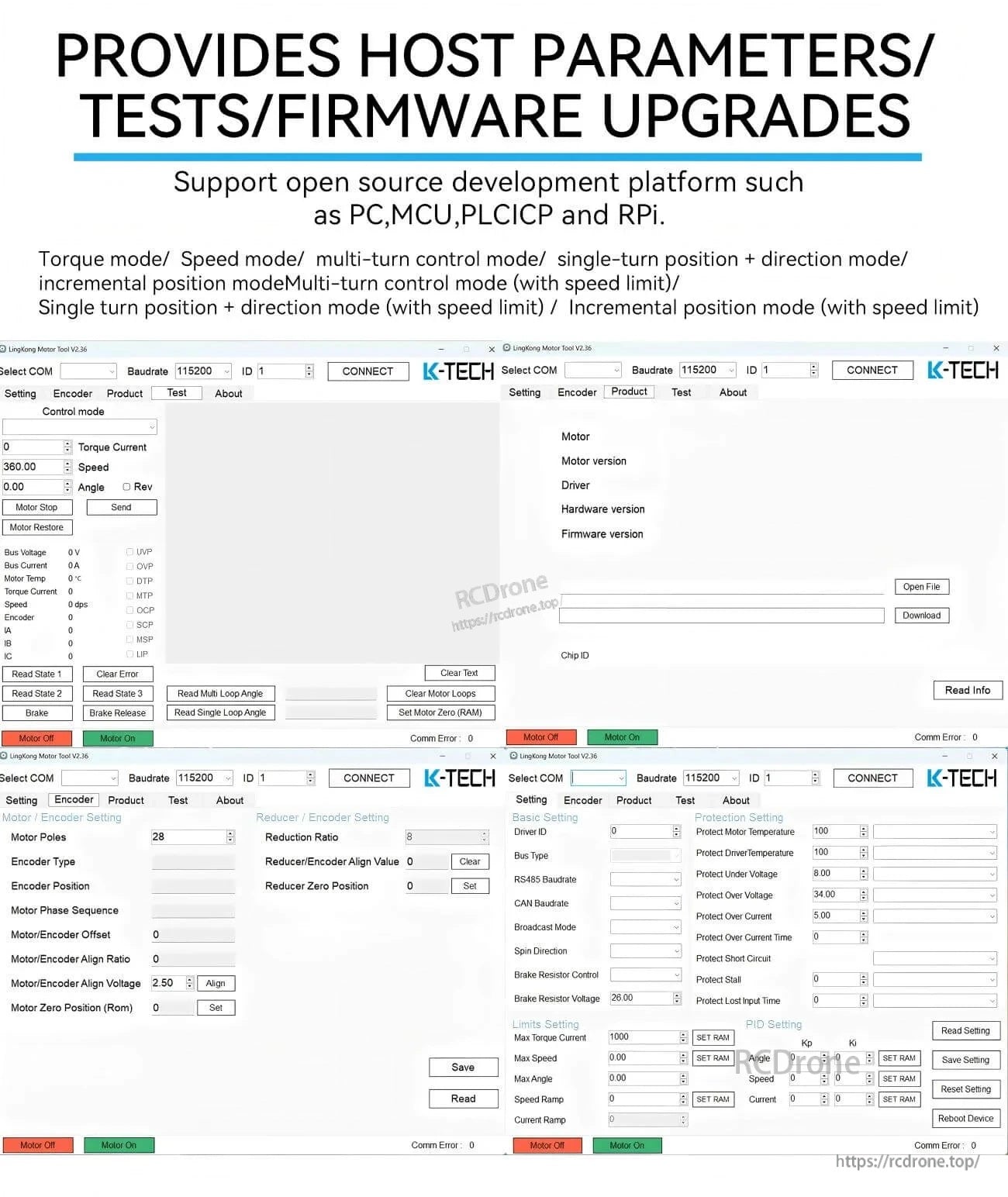
인코더 피드백 및 버스 통신은 로봇 관절을 위한 안정적인 토크, 속도 및 위치 제어를 지원합니다.
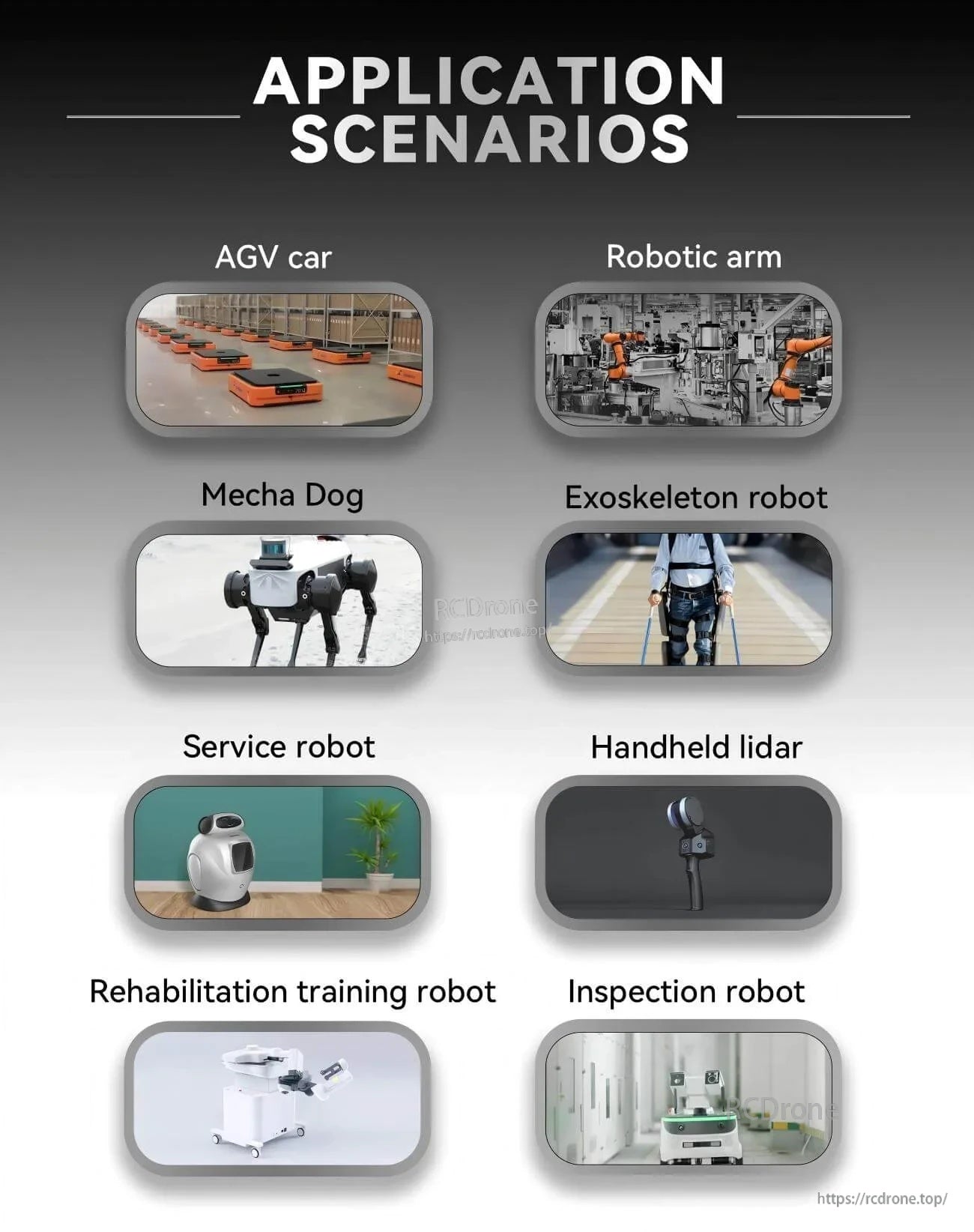
AGV 및 로봇 팔에서 다리 로봇 및 외골격 시스템에 이르기까지 로봇 작동 작업을 위해 설계되었습니다.
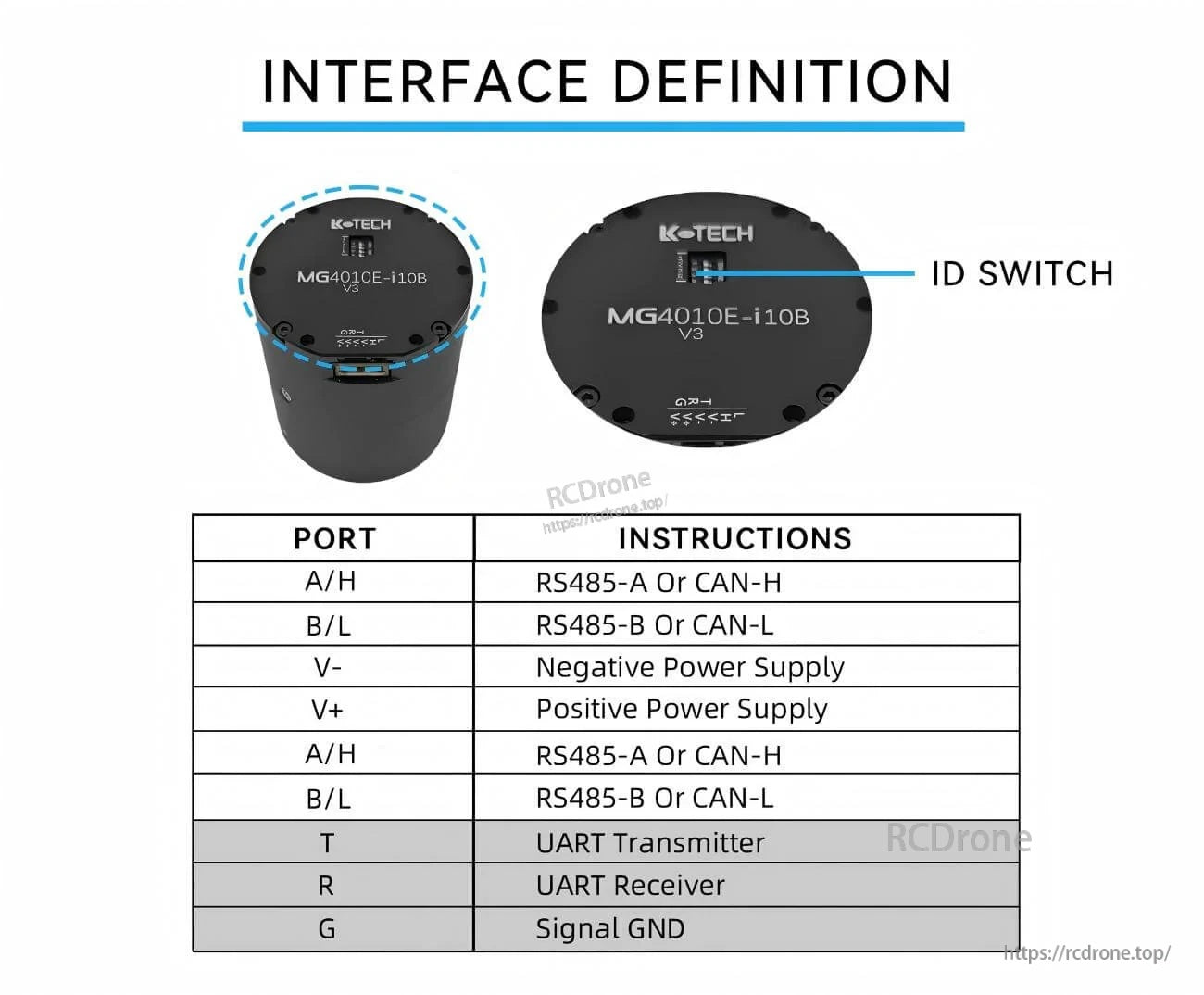
포트 정의는 전원, RS485/CAN 배선 및 UART 핀을 포함하며, 주소 지정을 위한 온보드 ID 스위치가 있습니다.

Related Collections




