MAD AM32 70A 3-8S 4IN1 드론 ESC
MAD AM32 70A 3-8S 4IN1 드론 ESC
MAD
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
그만큼 미친 AM32 70A 3-8S 4-in-1 키보드 고성능 전자 속도 컨트롤러로 설계되었습니다. FPV 레이싱 드론, 프리스타일 쿼드, 시네마틱 UAV. 특징 Infineon 항공 등급 MOSFET, 고전압 TDK MLCC 커패시터, 그리고 강력한 STM32L431 M4 커널 프로세서, 이 ESC는 다음을 제공합니다. 효율적인 방열, 빠른 모터 반응, 뛰어난 전력 안정성. 와 함께 실시간 전류 모니터링 및 온라인 펌웨어 업그레이드AM32 70A는 전문가 수준의 성능과 안정성을 제공합니다. 3S ~ 8S LiPo 구동 드론.
주요 특징
- 3-8S LiPo 배터리 지원 – 다양한 드론 설정을 위한 광범위한 전압 호환성.
- ESC 회로당 70A 연속 전류 – 까다로운 비행에도 안정적인 고전류 처리.
- BLHeli-32 펌웨어 – 원활한 제어와 최적의 효율성을 위한 고급 ESC 펌웨어.
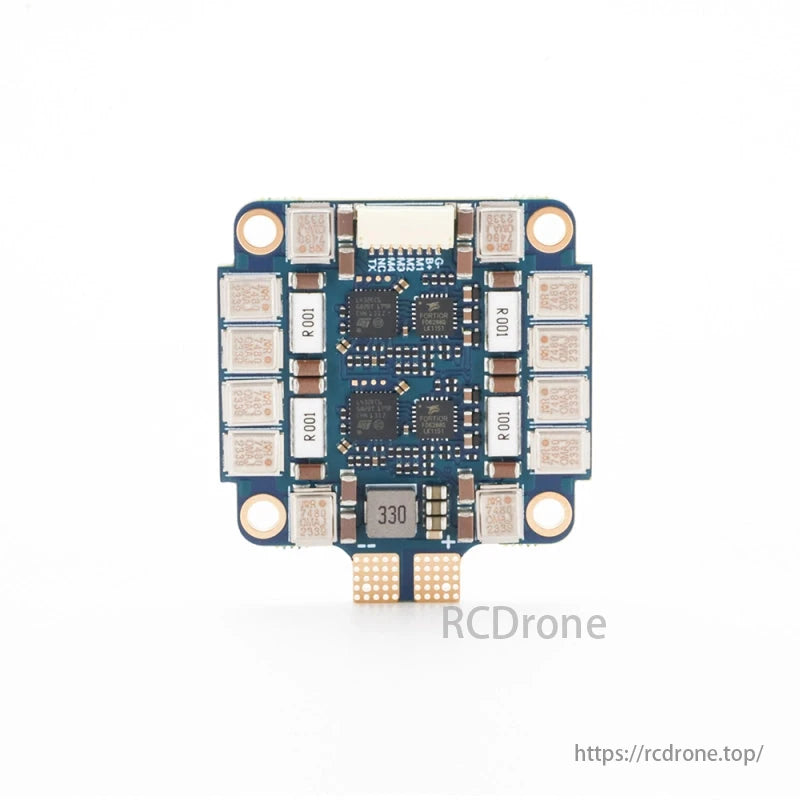
- Infineon 항공 등급 MOSFET – 향상된 방열 성능과 과전류 저항력.
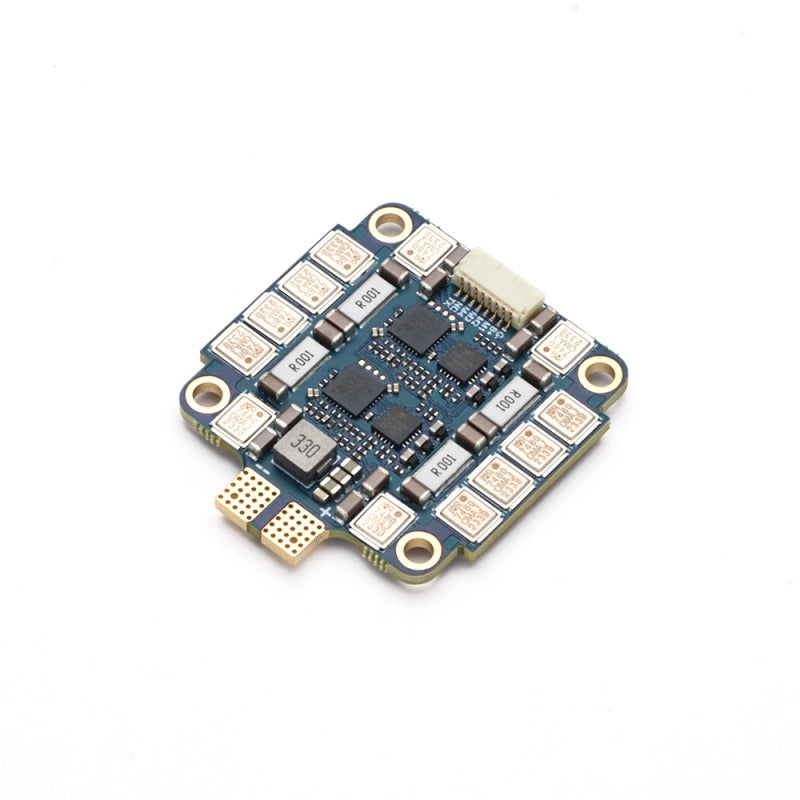
- 고전압 TDK MLCC 커패시터 – 안정적인 전압 출력을 제공하고 전원 노이즈를 줄여줍니다.
- 4개의 독립 전류 센서 – 작업 전류 및 전압을 실시간으로 모니터링할 수 있습니다.
- STM32L431 Cortex-M4 프로세서 – 뛰어난 모터 제어를 위한 더 빠른 계산 속도.
- 온라인 업그레이드 지원 – 네트워크에서 펌웨어 업데이트를 직접 다운로드합니다.
- 다중 프로토콜 지원 – 호환 가능 PWM, DShot150/300/600/1200, OneShot125/42 및 MultiShot.
기술 사양
| 매개변수 | 사양 |
|---|---|
| 모델 | AM32 70A 3-8S 4-in-1 ESC |
| 입력 전압 | 3-8S 리포 |
| 연속 전류 | 70A(ESC 회로당) |
| 프로세서 | STM32L431 / STM32L432 코텍스-M4 48M |
| 펌웨어 | BL헬리-32 |
| ESC 프로토콜 | PWM, DShot150/300/600/1200, OneShot125/42, 멀티샷 |
| 보드 크기 | 40mm x 43mm x 7mm |
| 장착 구멍 간격 | 30.5mm |
| 무게 | 14.2g (배선 제외) |
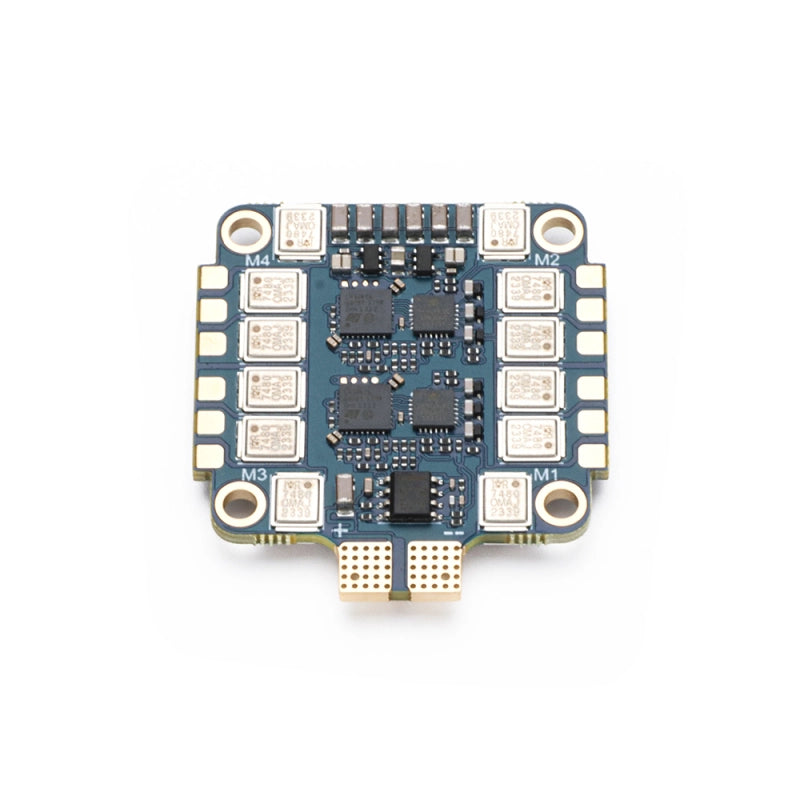
연결 다이어그램
- 4개의 모터 출력 – 무브러시 모터 연결을 위한 M1, M2, M3, M4 포트.
- 배터리 입력 – 박쥐 (+) 그리고 접지(-) 전원 연결용 단자.
- PWM / DShot 지원 – 대부분의 비행 컨트롤러와 호환성을 보장합니다.
고급 기능
- 통합 3-in-1 드라이브 회로 – 향상된 효율성으로 원활한 모터 작동을 보장합니다.
- 4개의 독립 전류 센서 – 정확한 정보를 제공합니다 전압 및 전류 모니터링.
- 고전압 입력 커패시터 – TDK MLCC 커패시터 개선 전력 안정성.
- 고전압 BEC 내장 – 전달합니다 1000V 입력 BEC외부 전원 모듈 요구 사항이 줄어듭니다.
- 금도금 솔더 패드 – 안정적이고 저항이 낮은 전기 연결을 보장합니다.
- 펌웨어 업그레이드 가능 – 사용자는 다음을 통해 펌웨어를 업데이트할 수 있습니다. 공식 GitHub 저장소.
이상적인 대상:
- FPV 레이싱 드론 – 극한의 기동을 위한 고속, 반응성 뛰어난 모터 제어.
- 프리스타일 드론 – 공중 트릭과 프리 스타일 비행을 위한 부드러운 파워 전달.
- 영화용 드론 – 안정적인 공중 영상 촬영을 위한 신뢰할 수 있는 성능.

AM32 70A ESC, 3-8S 4in1 전자 속도 제어 모듈.

Infineon Aviation Grade MOS는 효율적인 방열, 강력한 과전류 보호 기능, 4개의 독립 전류, 온라인 업그레이드, 수입 TDK MLCC, 더 빠른 계산을 위한 STM32L431 M4 커널을 갖추고 있습니다.

AM32 70A 3-8S 4in1 ESC의 기술 사양에는 3-8S Lipo의 입력 전압, 크기 40*43*7mm, 무게 14.2g, 펌웨어 BLHELI_32가 포함됩니다. STM32L431/432 프로세서로 PWM, Dshot, Oneshot 및 Multishot 프로토콜을 지원합니다. 4개의 독립적인 전류 및 전압 감지 회로가 특징입니다.

40mm x 43mm 전자 보드는 Motor 1, Motor 2, Motor 3, Motor 4로 표시된 4개의 모터에 연결됩니다. 다이어그램은 BAT 및 GND 지점과의 연결을 보여줍니다.
Related Collections