Matek AP Periph CAN 노드 CAN-G474 DroneCAN 어댑터 보드, STM32G474CE 512KB, CANFD 5Mbit/s
Matek AP Periph CAN 노드 CAN-G474 DroneCAN 어댑터 보드, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
정가
$39.00 USD
정가
할인가
$39.00 USD
단가
단위
세금이 포함된 가격입니다.
배송료는 결제 시 계산됩니다.
픽업 사용 가능 여부를 로드할 수 없습니다.
개요
이 AP Periph CAN 노드, Matek AP Periph CAN 노드 CAN-G474는 5Mbit/s CAN 트랜시버와 STM32G474 MCU를 사용하여 DroneCAN 버스에 주변 장치를 추가하도록 설계된 ArduPilot AP_Periph 어댑터 노드입니다. 이는 ArduPilot에서 지원하는 센서와 GPIO 기반 주변 장치(예: PWM 출력 및 LED 알림 모듈)를 DroneCAN을 통해 통합할 수 있게 해줍니다.
주요 특징
- ArduPilot AP_Periph 펌웨어 기반의 어댑터 노드
- 512KB 플래시를 갖춘 STM32G474CE MCU
- 1Mbit ~ 5Mbit 지원의 CAN/CANFD를 갖춘 CANFD 가능 하드웨어
- 2x CAN 버스
- GNSS, 거리 측정기, 근접 센서, EFI, RC 입력(수신기)용 4x UART; GNSS, 나침반, 기압계에 대해 기본적으로 TX3에서 MSP 활성화
- I2C 주변 장치용 2x I2C 버스(속도 센서, 기압계, 나침반)
- RM3100용 1x SPI(하단에 “CS, MOSI, MISO, SCK” 실크 인쇄가 있는 SPI 패드)
- 서보 및 ESC용 11x PWM 출력; 모든 PWM은 DMA/DShot을 지원합니다(PWM1-10은 DuPont 2에 위치).54mm 구멍; 하단에 "11" 실크 인쇄가 있는 PWM11 패드)
- 드론CAN GUI 도구 / 미션 플래너(드론CAN 탭)를 통한 펌웨어 업데이트 지원 및 STM32CubeProgrammer DFU 모드(UART1)를 통한 지원
사양
| MCU | STM32G474CE |
| 플래시 | 512KB |
| CAN 트랜시버 데이터 전송 속도 | 최대 5Mbit/s |
| CAN / CANFD 지원 | 1Mbit ~ 5Mbit CAN/CANFD |
| CAN 버스 | 2x |
| UART | 4x (기본적으로 TX3에서 MSP 활성화) |
| I2C | 2x |
| SPI | 1x (RM3100용) |
| PWM 출력 | 11x (DuPont 2에서 PWM1-10)54mm 구멍; PWM11 패드 하단) |
| 디버그 | ST 디버그, SWC & SWD (하단) |
| 펌웨어 업데이트 (DFU) | UART1 (TX1, RX1) |
| LED 표시등 | 파란색 빠른 깜박임: 부팅 중; 파란색 느린 깜박임: 비행 컨트롤러와 통신 중; 빨간색: 3.3V 표시기 |
| 입력 전압 범위 | 4.5~5.5V @5V 패드/핀& |
| 전력 소비 | 62mA |
| 작동 온도 | -30~85 °C |
| 커넥터 | 5x JST-GH-4P (SM04B-GHS-TB) for CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) for UART3+I2C2 |
| 관통 구멍 | 18x DuPont 2.54mm 구멍 |
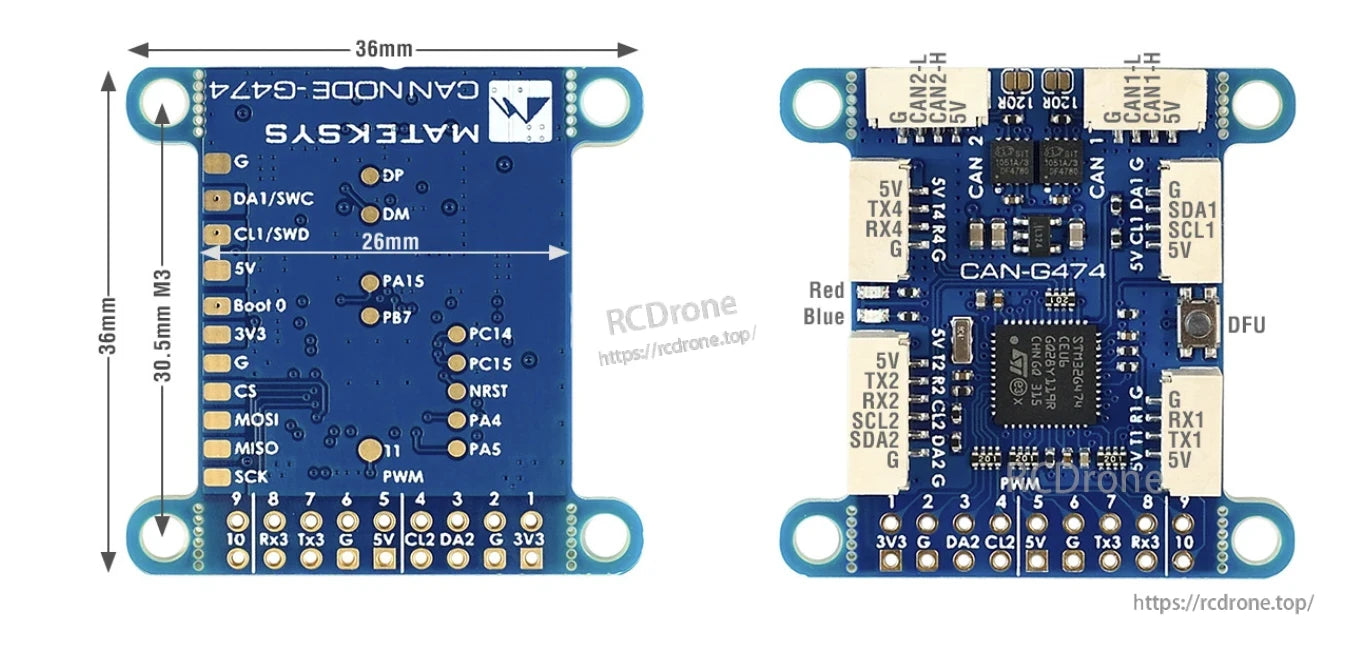
| 보드 크기 | 36mm*36mm*6mm |
| 무게 | 5.2g |
| 장착 | 30.5mm 4x 직경.3mm |
포함된 내용
- 1x CAN-G474 보드
- 2x JST-GH-4P to JST-GH-4P 20cm 실리콘 와이어
- 1x JST-GH-6P to JST-GH-6P 20cm 실리콘 와이어
고객 서비스: https://rcdrone.top/ 또는 [email protected]
응용 프로그램
- ArduPilot 지원 주변 장치를 DroneCAN 버스 주변 장치로 변환 (GNSS, 나침반, 기압계, 공기 속도 센서, 거리 측정기, 근접 센서, 전자 연료 분사기)
- DroneCAN의 GPIO 기반 주변 장치, PWM 및 LED 알림 모듈 포함
- 예시 주변 장치 연결: 거리 측정기, GPS & 나침반, 공기 속도 센서, RC 입력, I2C 배터리 모니터
- 중복 옵션: 비행 컨트롤러에 하나의 CAN 버스를 연결하거나 둘 다 연결
매뉴얼
- 펌웨어 다운로드 (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (주변 센서를 위한)
- MatekG474-DShot (DroneCAN-PWM 출력을 위한)
- 업데이트 방법
- DroneCAN GUI 도구 또는 미션 플래너 – DroneCAN 탭에서 “AP_Periph.bin” 로드
- STM32CubeProgrammer DFU 모드: USB-TTL 모듈을 UART1에 연결하고 DFU 버튼을 누른 채 USB를 연결한 후 “AP_Periph_with_bl.hex” 로드
- 3D 파일: CAN-G474_STEP.zip
- 튜토리얼: PWM 및 DShot을 위한 MatekL431 어댑터 사용
세부정보
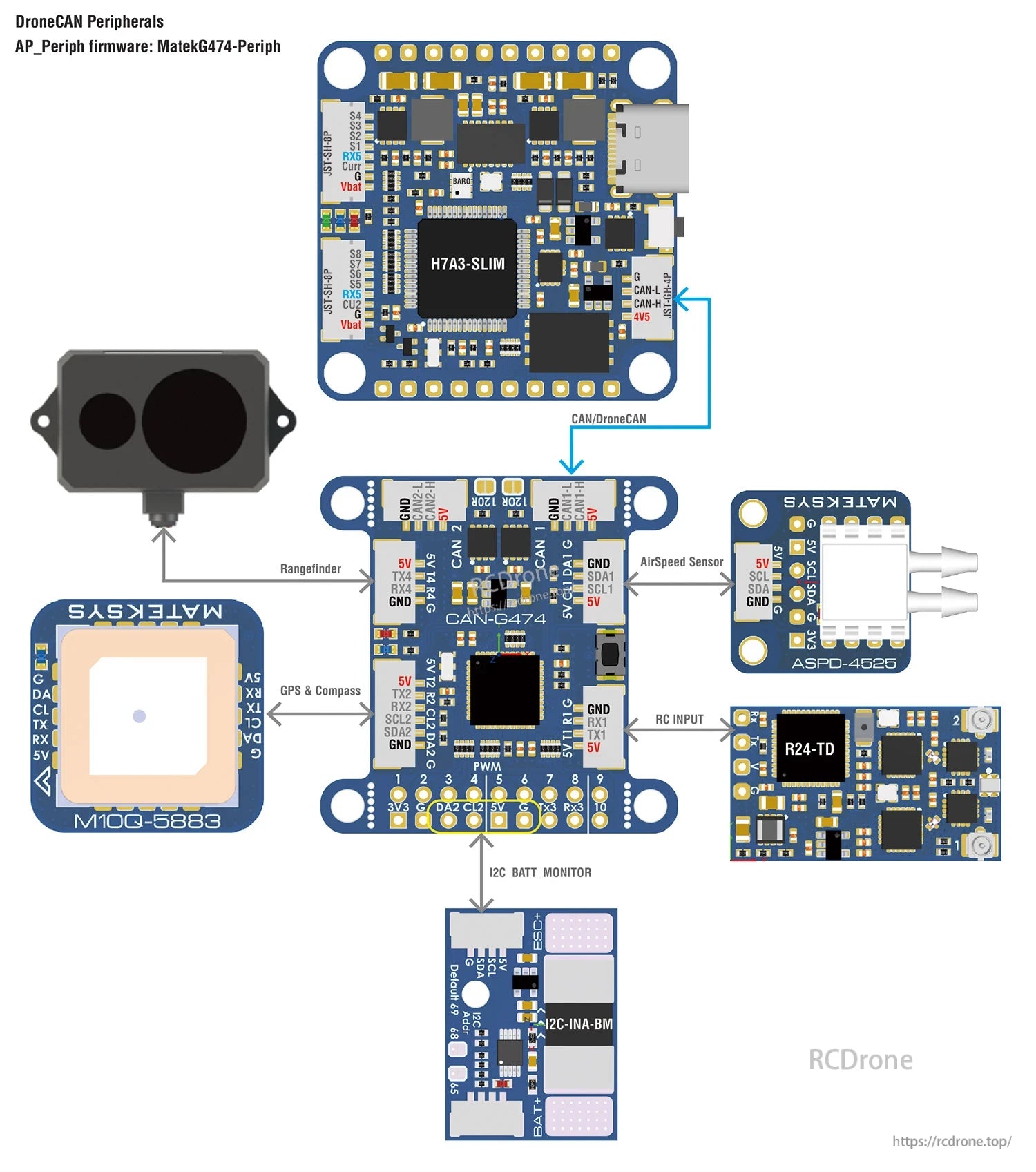
Matek CAN-G474 보드는 UART, I2C 및 PWM 패드와 함께 DroneCAN/CAN 포트를 제공하여 일반적인 자율 비행기 주변 장치를 연결할 수 있습니다.Matek CAN-G474 보드는 CAN/DroneCAN 버스에 연결되며 서보 또는 ESC를 위한 최대 10개의 PWM 출력을 분리합니다.